







本文扯了扯P,NP,NP-c,NP-hard。作为一个调节,过两天再聊linux。
先来看一个小故事,假如老板要你解决一个问题,你绞尽脑汁还是想不出来,叫天天不应,叫地地不灵,这时你走进老板办公室,可以采取3种策略:
(1)
一副倒霉像,神情ws,可怜巴巴的说:老板,我没做出来,我想我是太蠢了。。。
boss:蠢材!滚!
(失败。。。)
(2)
雄赳赳气昂昂跨进老板办公室,大吼一声:小样,你丫给我问题根本就无解,害我白想这么些天,我靠!
boss:我才靠,自己做不出来就说这个问题无解,要是人人都这样混,我这老板还当个屁阿,滚!
(做不出来还如此气概,不仅失败,而且欠扁。。。)
(3)
从容不迫的说:老板,我做不出来,但是,我敢肯定,那些大牛牛们也照样做不出来
boss:原来是这样,那也难为你了。
以上三副图虽然是一个笑话,但也可以为我们的生活研究提供一些思路和指导。当你面对一个问题解决不了时,那么就试图去证明别人也解决不了,这的确是一个偷懒逃避的好借口。我觉得P,NP,NP-c,NP-hard这些名称的出现,就是因为某些难问题,连CS的大牛们都解决不了,无可奈何之下,只好定义一堆东西,为自己找个理由,免得说自己太笨了 :)
言归正传,我们讨论的都是决策问题(说白了就是回答yes/no的问题),把决策问题按照难易程度分为几类:
(1)P问题。
定义:那些可以在多项式( polynomial )时间内解决的问题,称为P问题。(以后把"多项式时间",简写为P时间)。时间复杂度如(n^2, n^4, n(log(n)))都是P时间的,指数级别的如(2^n,n^n)这些就不是P时间了。一个算法的时间复杂度是P时间,哪怕是(n^100),我们都称这个算法是有效率 effecient 的。
如最大公约数(gcd),最短路径。但是还有很多问题我们不知道如何在P时间之内解决,如哈密顿路径等等。
(2)NP问题。
定义:给定一个解,我们可以在P时间内检查他正确与否的决策问题,成为NP( Non-deterministic polynomial )问题。
比如,我要找一个图的哈密顿路径,随便给我一个解,我都可以在P时间内检查它是不是哈密顿路径。只要形如定义的问题,就是NP问题。所以,P问题是属于NP问题的,因为给定一个P问题,我可以在P时间内找到答案,那么任意给我一个解,我简单的比较解和答案是不是相同,就可以回答yes/no,整个时间是P,符合定义。
(3)NP-c问题。
有意思的东西来了,在NP问题这一个大类里面,包含了太多太多的问题,有的很简单,如P问题,有的很困难,如找哈密顿路径。我们必须把这些同志区别开来。所以就定义了NP-c问题。
定义:NP-c问题是这样的一类问题,首先他是属于NP的,而且他是NP问题里面最难解决的问题。难到什么程度?只要其中某个问题可以在P时间内解决,那么所有的NP问题就都可以在P时间内解决了。
NP-c问题的定义出来了,但是,它忽悠了半天,除了说明这类问题比较难之外,其他啥也没有。我们还是不知道到底什么问题是NP-c问题,如何判定一个问题是不是NP-c问题。
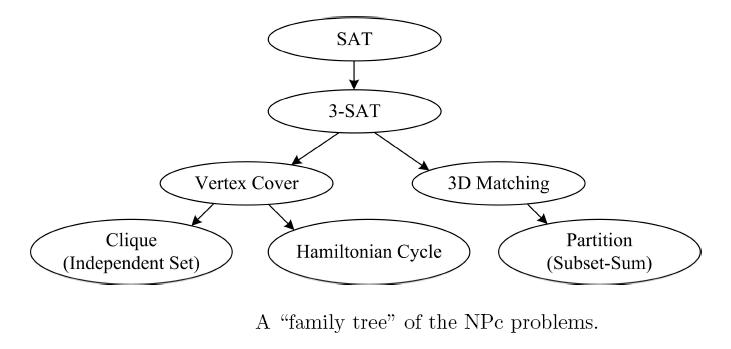
1970年,太阳出来了,十月革命一声炮响,cook同志发明了cook定理,找到了第一个NP-c问题,SAT(Satisfiability)问题。他是这么说的,如果SAT问题可以在P时间解决,那么所有的NP问题都可以在P时间内解决。
我靠,现在好了,我们知道了一个NP-c问题,下面的问题就好办了,要判断一个问题 Q 是不是相当难问题,是不是一个NP-c问题。那么我们要做的事情就是,第一步,判断Q是不是NP(这好办),第二步,判断Q这个问题的难度是不是比cook同志提出来的SAT问题还要难,如果Q比SAT问题还难,我靠,没希望了,丫肯定是NP-c。。。
判断两个问题Q,R的难易程度,我们可以这么来做。具体的套路叫做多项式归约(polynomial time reduction),意思是,我们要解决R,但是我们可以先把问题在多项式时间内转化成Q问题,只要解决了Q问题,R问题就解决了。如果问题R可以多项式归约到Q,那么Q一定不比R容易。记为R<=Q。
好了,我们就可以从第一个NP-c问题出发,一层一层的把问题转化下去,形成了NP-c问题的树。(这些问题的相互转化,很有意思,相当精彩!)
(4)NP-hard问题。
定义:NP-hard问题是这样的问题,只要其中某个问题可以在P时间内解决,那么所有的NP问题就都可以在P时间内解决了。NP-c问题就是NP-hard问题。但注意NP-hard问题它不一定是NP问题,比如,下围棋就是NP-hard问题,但不是NP问题,我们要在一个残局上找一个必胜下法,告诉我们下一步下在哪里。显然,我们找不这个解,而且更难的是,就算有人给我了一个解,我们也无法在P时间内判断它是不是正确的。
现在普遍认为这些问题的关系是这样的:(CO-NP和NP差不多)
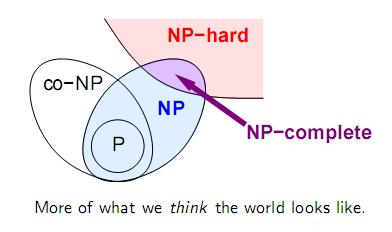
最后,P==NP?,鬼才知道。
by - 复旦人乙

















 188
188

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









