







【论文推荐|深度学习,滑坡检测,多光谱影像,自然灾害,遥感】2022年Landslide4Sense竞赛成果:基于多源卫星影像的先进滑坡检测算法研究(二)
【论文推荐|深度学习,滑坡检测,多光谱影像,自然灾害,遥感】2022年Landslide4Sense竞赛成果:基于多源卫星影像的先进滑坡检测算法研究(二)
文章目录
欢迎宝子们点赞、关注、收藏!欢迎宝子们批评指正!
祝所有的硕博生都能遇到好的导师!好的审稿人!好的同门!顺利毕业!
大多数高校硕博生毕业要求需要参加学术会议,发表EI或者SCI检索的学术论文会议论文:
可访问艾思科蓝官网,浏览即将召开的学术会议列表。会议详细信息可参考:https://ais.cn/u/mmmiUz
论文DOI:10.1109/JSTARS.2022.3220845
II. 数据与Landslide4Sense 2022竞赛基准
A. 数据集
- Landslide4Sense竞赛的基准数据集包含14层数据:来自Sentinel-2的多光谱数据(波段1-波段12)、ALOS PALSAR的数字高程模型(DEM)和坡度数据。
- 数据集中的所有14层数据均已调整为约10米/像素的分辨率,并按像素标注为滑坡与非滑坡类别。
该滑坡基准数据集包含训练集、验证集和测试集,涵盖了全球不同山区范围内发生的滑坡事件。具体来说,只有训练子集是从四个不同的地点获取的:北海道的伊部利东部地区、印度卡纳塔克邦的科达古区、尼泊尔巴格马蒂地区的拉苏瓦区,以及台湾西部的台东县。
针对滑坡标注,已有多种方法在相关研究中提出,特别是数据预处理工作流[18]、手工解释方法[14]、[19]、[20]、[21]、[22]、[23]、传统机器学习模型[24]、基于对象的方法[25]等。
目前大多数滑坡检测研究通常采用卫星影像的手工解读作为创建图像标签的基础。无论如何,滑坡可以通过多种方式进行标注,因此图像的标注方式取决于专家的判断[26]。因此,本研究使用了两步程序进行滑坡标注和图像标签生成。。

我们首先计算基于事前和事后影像的相关图像差异指数。不同的案例研究区域可能会有所不同,用于生成训练集、验证集和测试集的数据集。在得到的指数(例如红-绿差异、亮度、植被指数差异)和原始的事后滑坡影像的基础上,采用多分辨率分割(MRS)技术生成有意义的图像分段。MRS技术通过迭代过程生成图像分段,直到达到预定义的尺度和形状参数。基于多个阈值的规则图像分类方法可以根据研究区域的不同区分滑坡和其他特征[16]、[17]、[27]、[28]。
在滑坡标注和图像标签生成的第二步中,我们使用了多种数据源来对滑坡多边形进行视觉修正,特别是使用了Google Earth影像以及之前在若干研究中提供的滑坡清单数据集[29]来增强第一步的结果。标注仅显示滑坡的精确位置和清晰边界,不包括任何其他信息,例如滑坡类型和体积等。来自这四个地点的数据提供了3799个大小为128×128像素的图像块(见图1)。验证集和测试集分别包含245和800个相同大小的图像块,这些图像块来自其他地理区域。14层滑坡基准数据集的详细信息如下:
- Sentinel-2:Sentinel-2的多光谱图层包括超蓝、蓝、绿、红、可见光和近红外、短波红外(SWIR)波段。波段(B2,B3,B4,B8)的空间分辨率为10米,而波段(B5,B6,B7,B11,B12)和(B1,B9,B10)的空间分辨率分别为20米和60米。影像是在事件发生后、云层较少的日子拍摄的。
- ALOS PALSAR:ALOS相控阵类型L波段合成孔径雷达(SAR)图层,空间分辨率为12.5米,采集时间为2006年至2019年。阿拉斯加卫星设施(ASF)是一个分布式的活跃档案中心,提供免费的ALOS PALSAR高分辨率DEM数据。坡度图层是从ALOS PALSAR的DEM派生的,DEM和坡度图层都转换为10米空间分辨率。
更多关于滑坡基准数据集的详细信息,请参考[6]。
L4S竞赛的任务是从提供的数据集中预测滑坡。标签仅对3799个训练数据集中的图像块提供。滑坡检测结果将在验证集和测试集的滑坡类别上进行像素级F1评分评估。竞赛的排名仅根据该评估指标来确定。然而,参赛者在验证阶段还获得了精度和召回率指标,以便为他们的滑坡检测结果提供更有意义的反馈。
B. 基准模型
在L4S竞赛开始之前,我们在公共GitHub提供了一个简单的基准模型。为此,使用了PyTorch实现的最先进的深度学习(DL)语义分割模型。该模型包含一个用户可配置的训练脚本,用于U-Net [30]和用于读取训练和测试数据集的数据加载器。U-Net最初用于生物医学图像分割,随后被应用于众多语义分割任务,并取得了成功的结果。该模型也常用于滑坡检测任务,并已在若干研究中应用[12]、[31]、[32]。U-Net包含一个编码路径,用于捕捉低级特征表示,以及一个解码路径,用于捕捉高级特征表示。由于解码路径是非对称的,其中丢失的定位内容通过非对称设计恢复,而编码路径则遵循标准的CNN设计,由连续的卷积块组成。每个卷积块中包含一个大小为2×2、步幅为2的最大池化层,前面是两个大小为3×3的卷积层,每个卷积块中都采用了修正线性单元(ReLU)激活函数[30]。
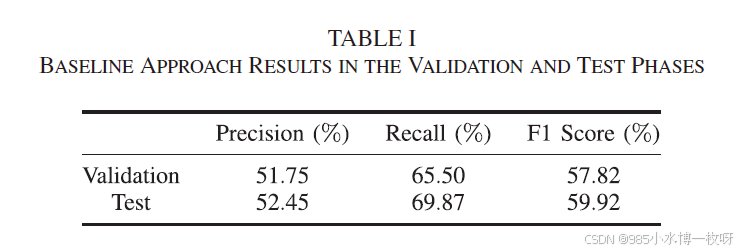
L4S竞赛中实现的基准U-Net模型包含23个卷积层,其中4个是卷积转置层。基准U-Net模型使用训练数据集进行训练,并在验证集(245个图像块)和测试集(800个图像块)上进行测试。验证集和测试集的基准准确度如表I所示。我们在训练和测试过程中使用了所有14个波段,并未应用额外的测量(例如数据增强、前后处理)。如L4S竞赛条款所述,禁止添加任何外部辅助数据(例如超高分辨率影像)。基准模型的最佳性能在测试集上达到了59.92%的F1分数。
下节请参考:【论文推荐|深度学习,滑坡检测,多光谱影像,自然灾害,遥感】2022年Landslide4Sense竞赛成果:基于多源卫星影像的先进滑坡检测算法研究(三)
第六届地质、测绘与遥感国际学术会议(ICGMRS 2025)
- 2025 6th International Conference on Geology, Mapping and Remote Sensing (ICGMRS 2025)
- 大会官网:www.icgmrs.com
- 大会时间:2025年4月25-27日
- 大会地点:中国·湖北·武汉
- 出版检索:会议论文集出版,提交EI Compendex, Inspec, Scopus等数据库



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











