






为方便查阅,此文是原网站文档翻译,如有侵权,请与本人联系。
官网
目录
与轮式车辆类似,Chrono::Vehicle 中的轨道车辆是通用车辆系统的专业化,并被定义为子系统的层次结构,如下所示。 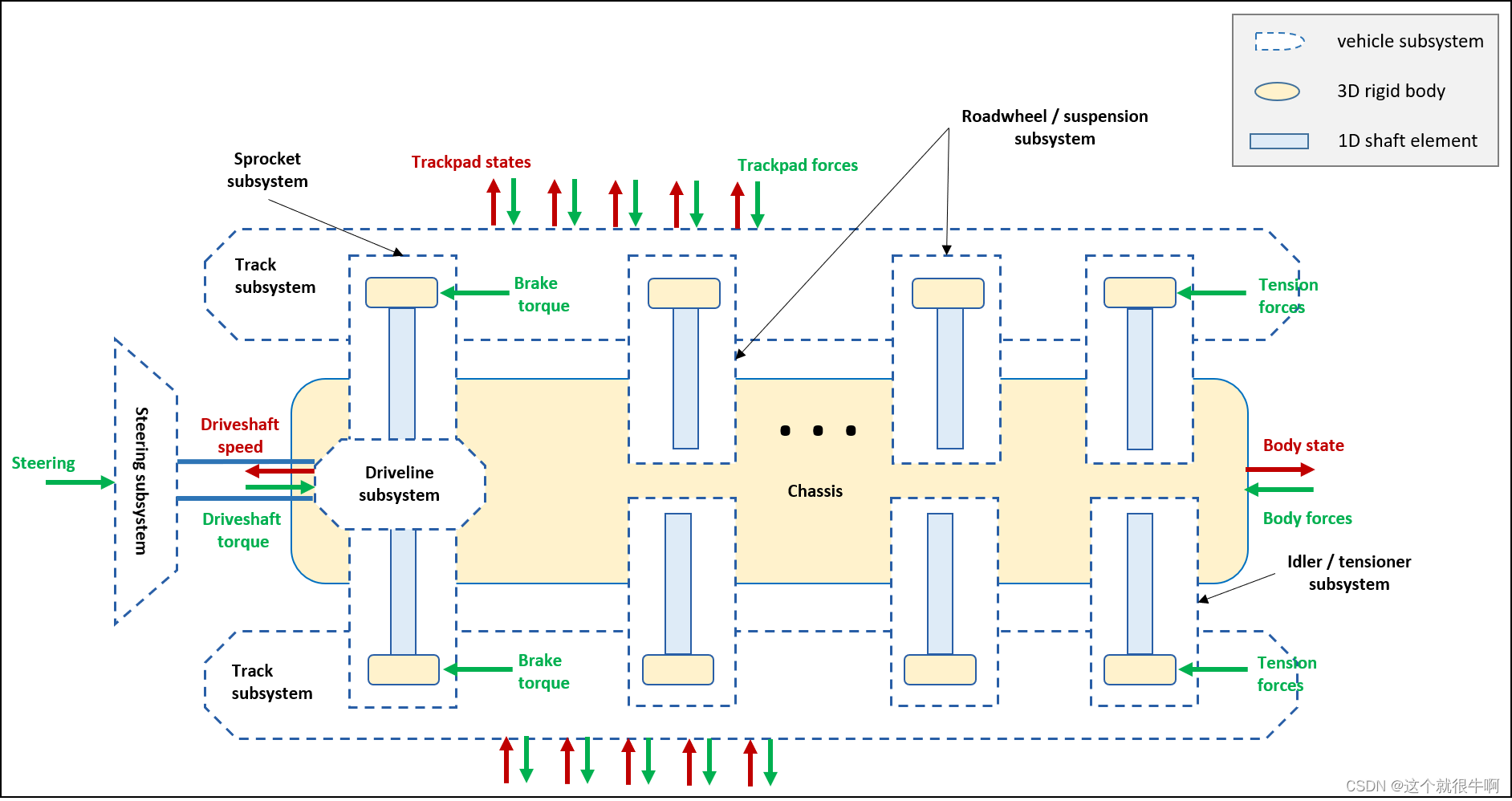
目前,支持履带车辆的单一拓扑结构,在顶层包括底盘子系统、车辆动力传动系统、转向机构和两个履带总成子系统,后者是其他子系统的容器,每个子系统包括链轮机构、惰轮张紧器子系统、任意数量的悬架部件和任意数量的履带板组件。
参考ChTrackedVehicle.
以下各节介绍了各种子系统模板:
Track assembly 履带组件
Chrono::Vehicle履带总成是车辆子系统的容器,包括链轮、带张紧器的惰轮、可选的一组滚柱、多个悬挂机构和任意数量的履带板机构。
为了消除履带板本体一致初始化的负担,履带组装子系统为链轮、惰轮、车轮和任何现有压路机周围的履带自动组装提供算法支持,为链轮轮廓和相关履带板模型的不同组合提供了专门的履带组件和相应的组装程序。
Chrono::Vehicle中的各种履带总成模板因使用的履带板类型而异:
- ChTrackAssemblySinglePin 单销钉
- ChTrackAssemblyDoublePin 双销钉
- ChTrackAssemblyBandBushing 衬套
- ChTrackAssemblyBandANCF
Suspension models 悬架模型
可提供不同的悬架配置,包括带线性或旋转阻尼器的扭转弹簧和液压气动悬架模板。轨道组件可以包含任意数量的悬架子系统,对于使用扭力弹簧的模板,悬架子系统可以包括也可以不包括阻尼器, Chrono::Vehicle 悬架子系统还包含一个车轮,其本身基于所使用的履带板类型(中央或横向导向销)进行模板化。
与轮式车辆的情况类似,履带车辆悬架模板允许完全自由地指定弹簧和阻尼力,这些力可以是线性或非线性的,通过表格查找定义或在用户提供的C++函数中实现。
平移减振器悬架
参考ChTranslationalDamperSuspension 和TranslationalDamperSuspension.
旋转减振器悬架
参考ChRotationalDamperSuspension 和RotationalDamperSuspension.
中心销车轮
参考ChDoubleTrackWheel 和 DoubleTrackWheel.
横向销式车轮
参考ChSingleTrackWheel 和SingleTrackWheel.
Sprocket models 链轮模型
链轮子系统将履带车辆传动系连接到履带组件,并负责碰撞检测和与履带板本体的接触处理。链轮子系统模板实现用于一致的一对链轮齿轮轮廓和相关联的履带板的定制碰撞检测算法。Chrono::Vehicle为链轮子系统提供了两个模板,对应于支撑履带板的类型,即单销、双销和带式履带。链轮齿廓被定义为由线段和圆弧组成的二维路径,这些线段和圆弧被参数化用于每种类型的齿廓。碰撞检测是在2D中执行的,在链轮的平面中工作,但在施加到链轮和相互作用的履带板体之前,接触力是在3D中计算的。除了齿轮轮廓外,链轮模板还通过链轮本体的质量和惯性、链轮轴的旋转惯性以及两个齿轮之间的分离距离来参数化。
单销链轮
此链轮模板使用由圆弧组成的齿轮轮廓。这种链轮类型适合与单销履带板相互作用。
参考ChSprocketSinglePin 和SprocketSinglePin.
双销链轮
此链轮模板使用由圆弧和平座组成的齿轮轮廓。这种链轮类型适合与双销履带板相互作用。
参考ChSprocketDoublePin 和SprocketDoublePin.
带式履带链轮
此链轮模板使用由圆弧和平座组成的齿轮轮廓。这种链轮类型适合与连续带式履带相互作用。
参考ChSprocketBand 和SprocketBand..
Idler models 惰轮模型
Chrono::Vehicle 惰轮机构由惰轮和将惰轮连接到底盘的机构组成。惰轮可以是采用中央导向销的ChDoubleTrackWheel,也可以是采用横向导向销的ChSingleTrackWheel。
惰轮子系统是相对于以惰轮原点为中心的框架定义的,可选择相对于底盘参考框架倾斜。平移关节与该参考系的X轴对齐,而旋转关节的旋转轴与其Y轴对齐。
为不同的惰轮机构拓扑结构提供了不同的模板。
平移惰轮
惰轮通过旋转接头连接到连接体,连接体又通过平移接头连接到底盘。线性致动器充当张紧器,该张紧器被建模为具有可选预加载的通用弹簧阻尼器。
参考ChTranslationalIdler 和TranslationalIdler.
距离惰轮
惰轮与固定在底盘上的臂相连。固定距离约束将手臂相对于底盘进行定位。
参考ChDistanceIdler 和DistanceIdler.
Track shoe models 履带板模型
Chrono::Vehicle 提供单销和双销履带板的模板,每个履带板都可以有中央或横向导向销。单销履带板由一个具有非平凡接触几何形状的单体组成,该单体通过旋转接头与其相邻体连接。除了主履带板主体外,双销履带板模板还包括两个额外的连接器主体,这两个连接器主体通过旋转接头连接到相邻的履带板,并且承载用于与履带的链轮碰撞的接触几何形状。
此外,还提供了两种不同型号的连续波段音轨。
所有履带板模板在组成体的尺寸、质量和惯性以及它们的接触几何形状方面都是完全参数化的。
单销履带板
参考ChTrackShoeSinglePin 和TrackShoeSinglePin..
双销履带板
参考ChTrackShoeDoublePin 和TrackShoeDoublePin.
Band-bushing履带板
参考 ChTrackShoeBandBushing 和TrackShoeBandBushing.也参考基类ChTrackShoeBand
Band-ANCF履带板
参考 ChTrackShoeBandANCF 和ChTrackShoeBandANCF.也参考基类ChTrackShoeBand
台架试验
下图显示了ChTrackTestRig中单销履带组件模拟的快照(驱动对应于以10m/s的速度在颠簸处行驶)和样本输出图。


此模拟中使用的道路纵断面是通过以下输入数据文件指定的:
0 0
2.0000 0
2.0100 0.0010
2.0200 0.0039
2.0300 0.0089
2.0400 0.0157
2.0500 0.0245
2.0600 0.0351
2.0700 0.0476
2.0800 0.0618
2.0900 0.0778
2.1000 0.0955
2.1100 0.1147
2.1200 0.1355
2.1300 0.1577
2.1400 0.1813
2.1500 0.2061
2.1600 0.2321
2.1700 0.2591
2.1800 0.2871
2.1900 0.3159
2.2000 0.3455
2.2100 0.3757
2.2200 0.4063
2.2300 0.4373
2.2400 0.4686
2.2500 0.5000
2.2600 0.5314
2.2700 0.5627
2.2800 0.5937
2.2900 0.6243
2.3000 0.6545
2.3100 0.6841
2.3200 0.7129
2.3300 0.7409
2.3400 0.7679
2.3500 0.7939
2.3600 0.8187
2.3700 0.8423
2.3800 0.8645
2.3900 0.8853
2.4000 0.9045
2.4100 0.9222
2.4200 0.9382
2.4300 0.9524
2.4400 0.9649
2.4500 0.9755
2.4600 0.9843
2.4700 0.9911
2.4800 0.9961
2.4900 0.9990
2.5000 1.0000
2.5100 0.9990
2.5200 0.9961
2.5300 0.9911
2.5400 0.9843
2.5500 0.9755
2.5600 0.9649
2.5700 0.9524
2.5800 0.9382
2.5900 0.9222
2.6000 0.9045
2.6100 0.8853
2.6200 0.8645
2.6300 0.8423
2.6400 0.8187
2.6500 0.7939
2.6600 0.7679
2.6700 0.7409
2.6800 0.7129
2.6900 0.6841
2.7000 0.6545
2.7100 0.6243
2.7200 0.5937
2.7300 0.5627
2.7400 0.5314
2.7500 0.5000
2.7600 0.4686
2.7700 0.4373
2.7800 0.4063
2.7900 0.3757
2.8000 0.3455
2.8100 0.3159
2.8200 0.2871
2.8300 0.2591
2.8400 0.2321
2.8500 0.2061
2.8600 0.1813
2.8700 0.1577
2.8800 0.1355
2.8900 0.1147
2.9000 0.0955
2.9100 0.0778
2.9200 0.0618
2.9300 0.0476
2.9400 0.0351
2.9500 0.0245
2.9600 0.0157
2.9700 0.0089
2.9800 0.0039
2.9900 0.0010
3.0000 0
5.0000 0
© 2016 Project Chrono.
A community project led by the University of Wisconsin-Madison and University of Parma-Italy.
欢迎交流,一起学习,Q群:902809729

















 527
527

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









