






硬件接法 三三导通
目前状态 √代表完成,* 代表硬件接法无法实现,X 代表未完成
1.六步换向,方波开环控制(定时器换向)√
2.有感方波闭环(霍尔反馈位置换向)√
3.有感方波速度闭环(速度控制,转速检测)√
4.有感方波速度与电流闭环(速度控制,转向控制,堵转检测)√
5.无感方波控制(采用硬件电压比较器) *
6.无感方波速度闭环 *
7.有感FOC (霍尔反馈电角度)√
8.无感FOC (采用观测器)x
下面只记录关键点
下面用A - B - C 代表U - V - W
标准6步换向,再次说明,硬件采用三三导通连接方式
第一步
//A * B- C+
第二步
//A+ B -C*
第三步
//A+ B* C-
第四步
//A* B+ C+
第五步
//A_B+C*
第六步
//A- B* C+
然后单片机仿真单步运行,正常霍尔传感器在每一步会输出不同的电平,做成表格
芯片使用经典stm32f103
在配置cubeMX 有几个通用做法
定时器1用于输出pwm,通道4用于触发事件,通过注入方式采集电流
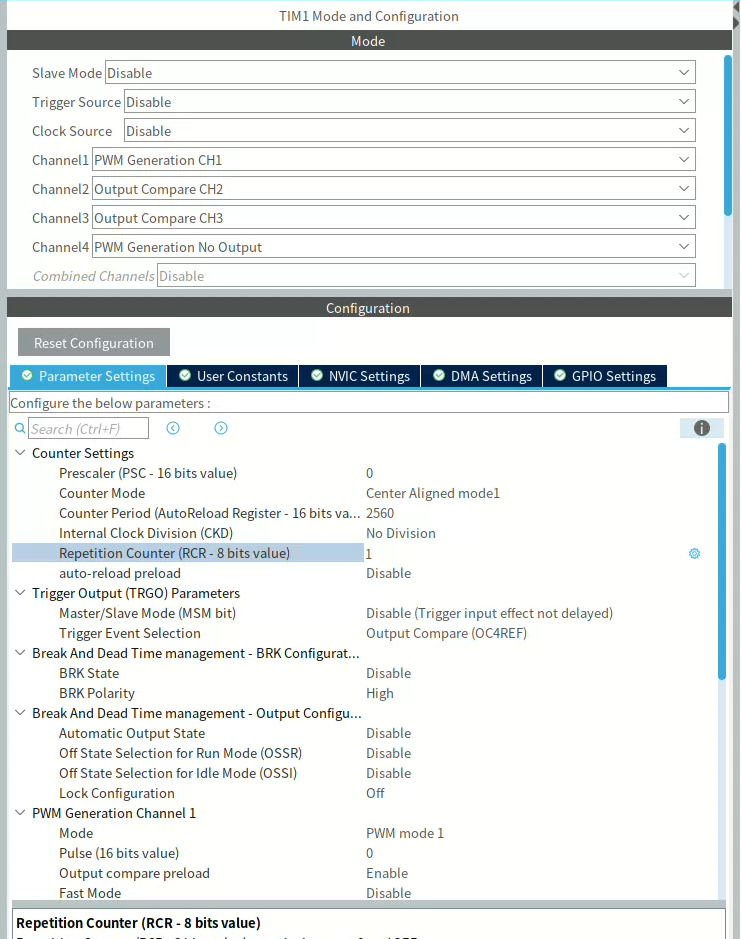
定时器2用于基本开环6步换向
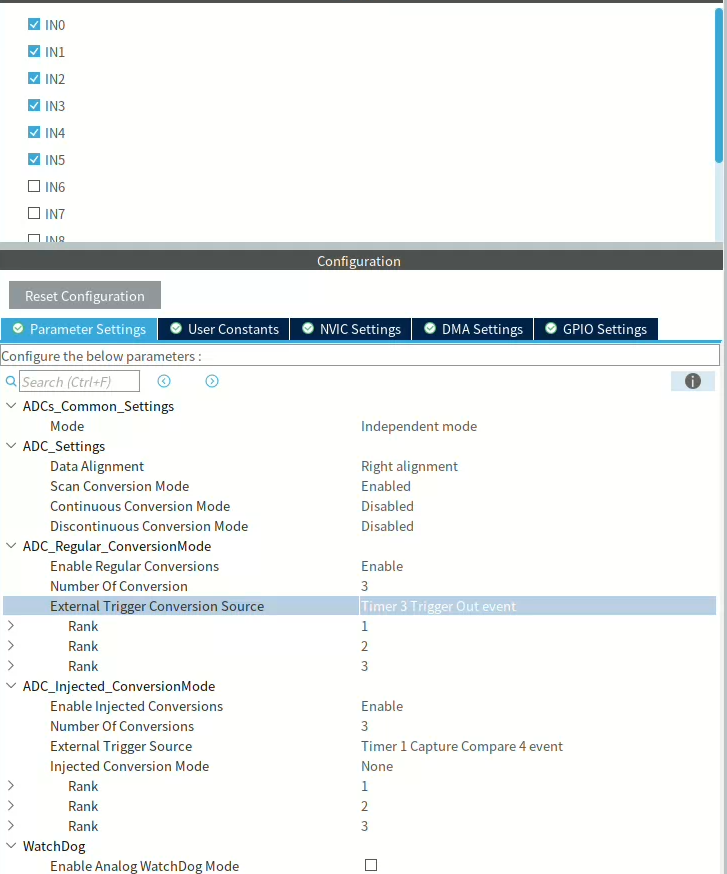
定时器3用于触发事件序列采集其他adc
定时器4用于读取霍尔传感器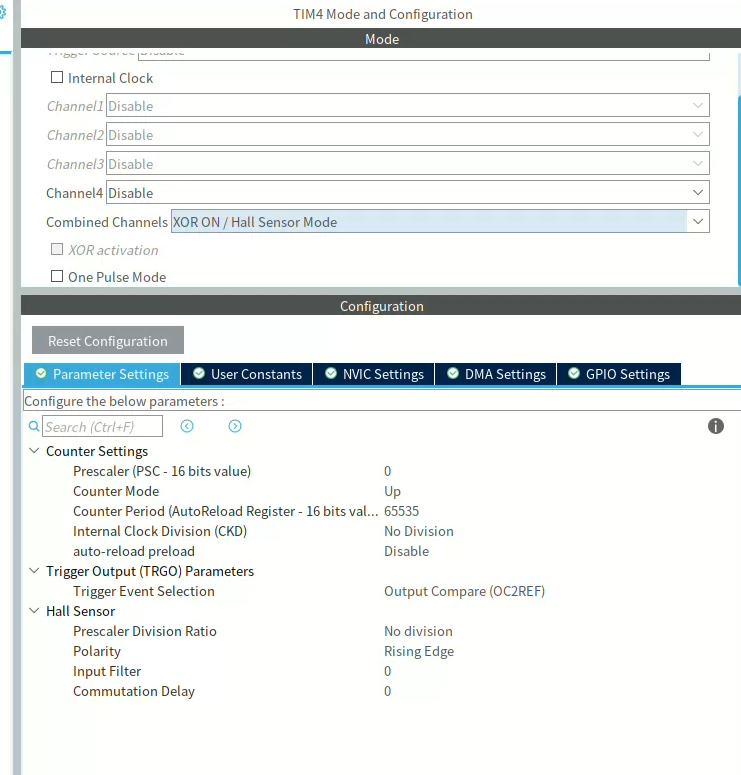
adc序列通道采样使用DMA ,定时器3触发
注入通道用定时器1通道4触发
串口打印也使用dma
至此,所有的驱动和采集都由硬件去完成,后续做foc算法时,不会占用太多cpu资源
后续将硬件改为两两导通,实现上面的所有功能后,会做统一整理,开源


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









