







 本文介绍了如何使用STM32 Net MF开发板控制28BYJ-48步进电机,通过非PWM模式实现四相八拍的控制。采用ULN2003驱动板,详细说明了接线和控制代码,包括初始化、设置预分频器、开始和停止定时器的功能。同时,提供了顺时针和逆时针旋转的代码示例,并分享了动态调整速度的方法。
本文介绍了如何使用STM32 Net MF开发板控制28BYJ-48步进电机,通过非PWM模式实现四相八拍的控制。采用ULN2003驱动板,详细说明了接线和控制代码,包括初始化、设置预分频器、开始和停止定时器的功能。同时,提供了顺时针和逆时针旋转的代码示例,并分享了动态调整速度的方法。
选用的步进电机的型号为28BYJ-48(或MP28GA,5V,转速比1/64),驱动电路选用uln2003芯片的驱动板,其控制时序图如下:
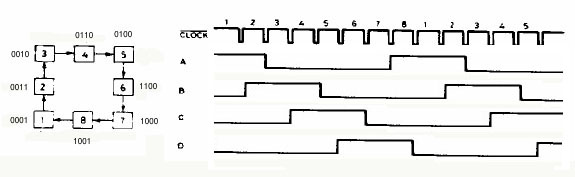
四相八拍:A->AB->B ->BC ->C ->CD ->D ->DA
其A、B、C、D指的是uln2003芯片驱动板的1N1、1N2、1N3、1N4,波形在上表示有输入信号,波形在下表示无输入信号。
我们采用红牛开发板进行步进电机控制,为了便于接线,我们需要在红牛开发板上焊接两条30脚双排排阵,焊接后的红外板如下:
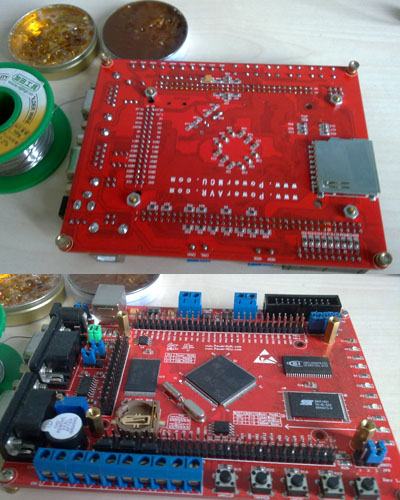
此外至少需要4根杜邦线,还需提供一个5V的直流电源,接线方式如下:
PC4接IN1
PC5接IN2
PC6接IN3
PC7接IN4
5V电源连接
网友fangyuan和奋斗中写了一个纯.NET MF C#的控制代码,比较容易理解,但是由于是托管代码,需要虚拟机解释执行,所以运行效率较低,部分代码如下:
//四相八拍:A->AB->B->BC->C->CD->D->DA
while (true)
{
//A相输出高电平,BCD低
pios[0].Write(high);
pios[1].Write(low);
pios[2].Write(low);
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









