






探索未来科技:GUNDAM ROBOT 开源项目
项目介绍
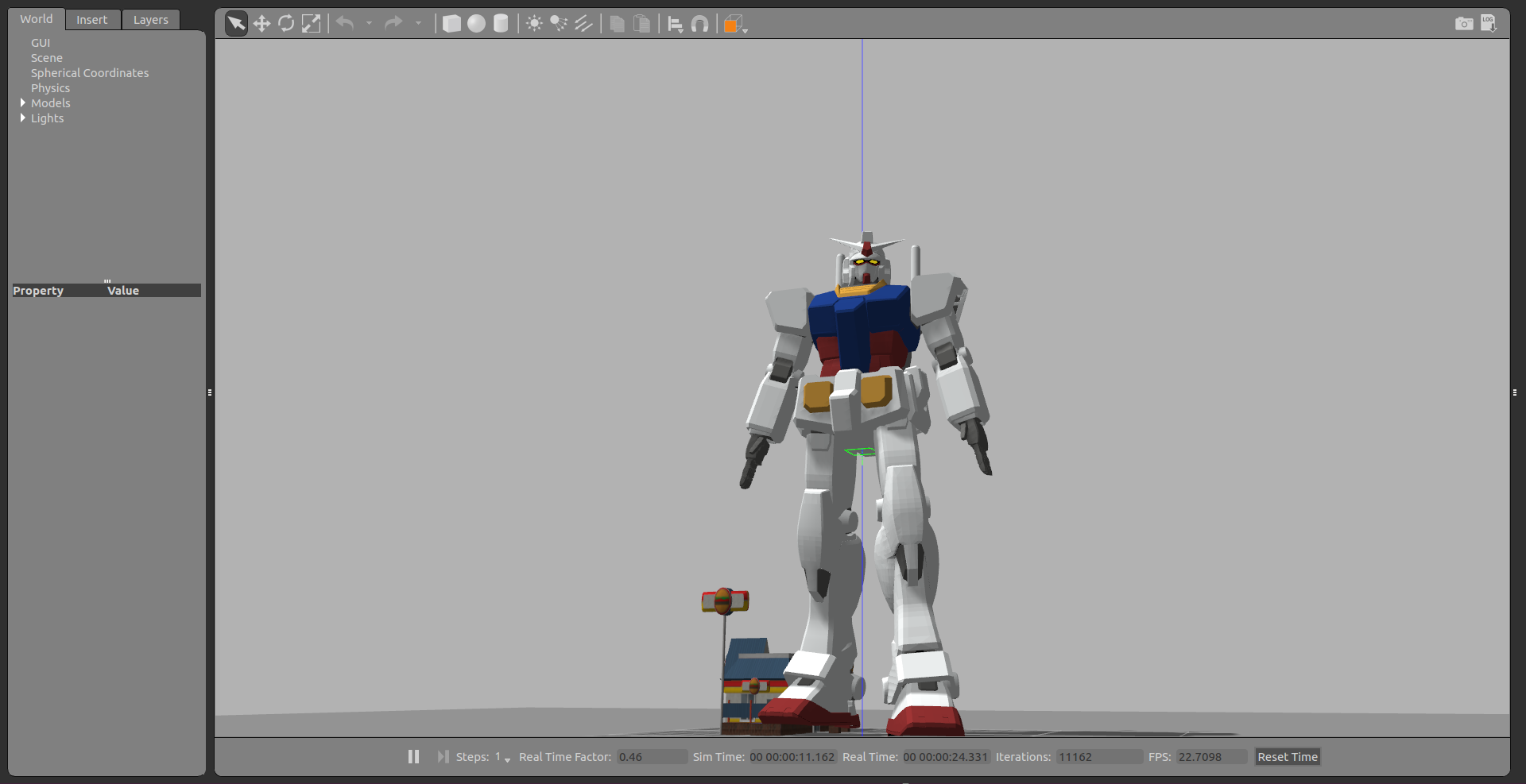
在机器人技术的世界中,我们很高兴地向大家推荐一款名为"GUNDAM ROBOT"的开源项目。这个项目基于ROS(Robot Operating System)平台,提供了GUNDAM机器人的仿真模型与动态控制功能。借助于Gazebo模拟器,你可以在一个逼真的环境中操控RX-78型GUNDAM机器人,甚至尝试实验性的行走模式。
项目技术分析
该项目的核心是利用ROS的包管理和通信机制,为GUNDAM机器人构建了详细的URDF(Unified Robot Description Format)模型,并提供了用于可视化和模拟的工具。通过display.launch可以方便地在rviz中查看和调整机器人的三维模型。此外,项目还集成了Gazebo模拟环境,允许你在虚拟世界中运行复杂的动力学模拟。
对于开发者而言,项目提供了一套完整的开发流程,包括从DAE文件转换为URDF的脚本和一个使用wstool的Rosinstall文件,以简化工作空间的设置和依赖安装。
项目及技术应用场景
- 教育与研究:学术界和工业界的工程师、学生都可以利用这个项目来学习ROS编程、机器人建模以及机械臂的控制策略。
- 算法验证:在Gazebo环境下,可以测试和优化路径规划、避障、行走控制等复杂算法。
- 娱乐与展示:对GUNDAM机器人感兴趣的爱好者可以在此平台上实现自己的创意,例如制作独特的行走动画或交互程序。
项目特点
- 逼真模拟:利用Gazebo模拟器,可以体验到接近真实的机器人动力学行为。
- 简易操作:通过预定义的脚本,可以轻松控制关节角度和实验性行走模式。
- 高度可扩展:基于ROS的设计使得添加新的传感器、控制器或者修改现有行为变得容易。
- 社区支持:作为开源项目,它有活跃的开发社区,用户可以通过贡献代码或提问获取帮助。
如果你对机器人技术充满热情,想要亲手打造属于自己的GUNDAM机器人,那么这个项目无疑是你探索之旅的理想起点。现在就动手尝试吧,将科幻变为现实!
















 1000
1000











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











