






探索未来交通的视觉钥匙:4D全景激光雷达分割
在自动驾驶和智能交通系统领域,精准感知环境是核心挑战之一。今天,我们要向您推荐一款前沿的开源项目——4D Panoptic Lidar Segmentation,它为理解复杂城市环境带来了革新性的解决方案。
项目介绍
4D Panoptic Lidar Segmentation是一个旨在推进激光雷达点云处理的技术库,通过结合先进的深度学习方法,实现了对三维空间内物体的精细分割与分类。该项目基于PyTorch框架,并从KPConv-PyTorch项目继承而来,它不仅提升了点云数据的处理能力,也进一步推动了4D(空间加时间)信息的理解边界。
项目官网包含了演示视频,直观展示了其强大功能与应用潜力:项目网站。
技术分析
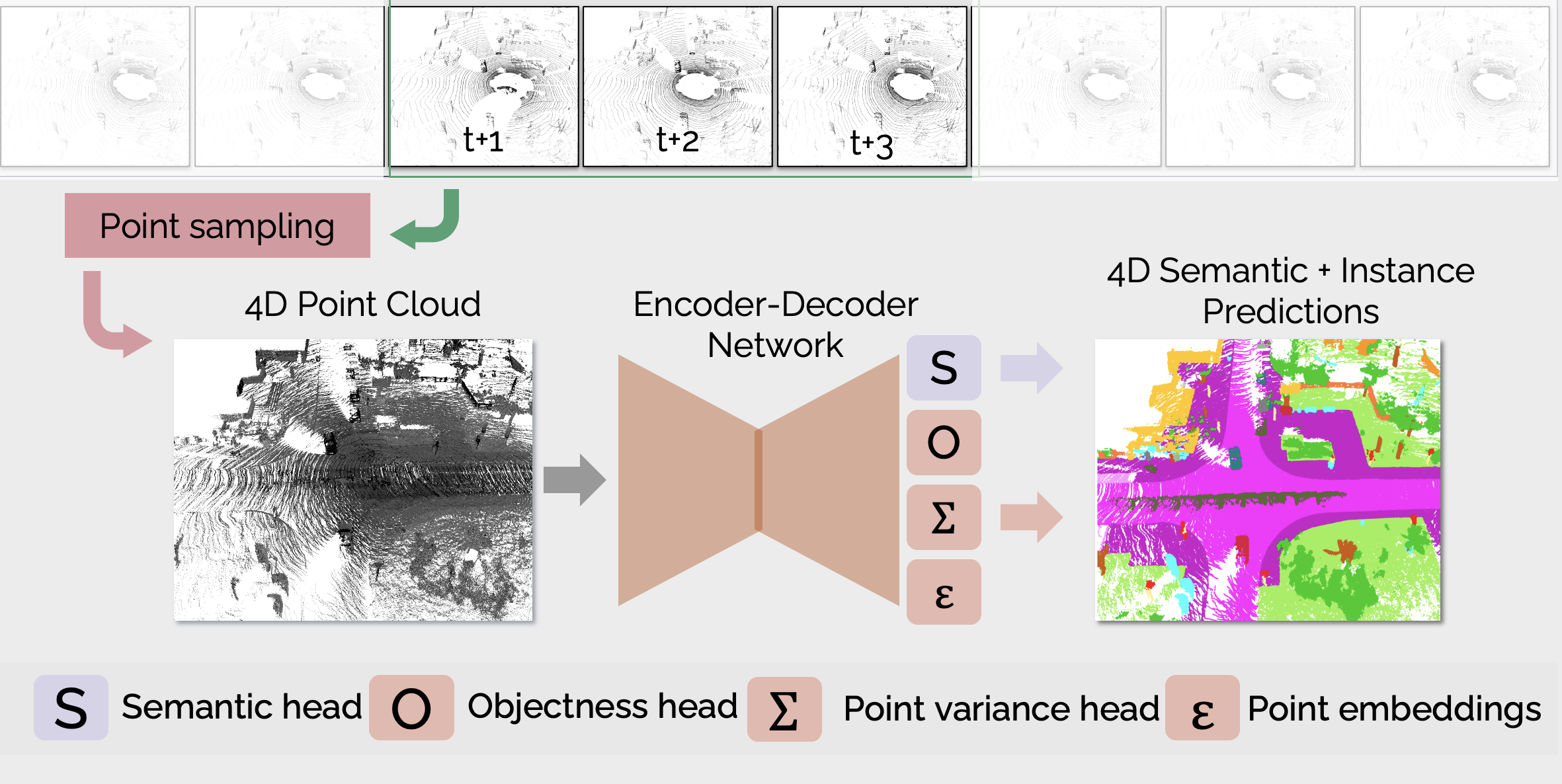
这个项目的核心在于将传统的点云分割提升至“全景”水平,意味着它不仅能识别物体类别,还能区分同一类别的不同实例。利用深度神经网络,特别是针对激光雷达数据优化的架构,4D Panoptic Lidar Segmentation能够在时序点云数据上实现精细化的分割。它的关键技术包括自定义的网络层设计,以高效地处理时空连续性中的高维数据,以及预训练策略,保证模型快速收敛并达到高性能。
应用场景
在自动驾驶车辆中,该技术能够帮助系统实时理解周围环境,比如精确区分道路上的行人、车辆、甚至同类型车辆的不同个体,从而做出更加安全、高效的决策。此外,在智慧城市规划、无人机自主导航、以及工业自动化等领域,该技术也有广泛的应用前景,特别是在需要高精度环境理解和动态追踪的场景下。
项目特点
- 4D感知:超越传统3D分割,整合时间维度,提供连续变化的环境理解。
- 即插即用的架构:基于成熟的PyTorch生态系统,易于集成到现有研究或产品中。
- 全面的数据处理流程:从数据准备到模型训练、测试再到评估,提供完整的工具链。
- 预训练模型:加速研发进程,允许开发者快速验证概念,无需从零开始训练。
- 开源精神:遵循GPL许可协议,鼓励社区参与,促进技术创新。
借助4D Panoptic Lidar Segmentation,我们朝着构建更智能、更安全的交通系统迈进了一大步。无论是研究人员还是开发者,都能够在这个项目的基础上探索更多可能,解锁未来移动出行的新篇章。赶快加入社区,一起开启4D感知的科技之旅吧!
通过上述介绍,希望您能感受到4D Panoptic Lidar Segmentation项目的力量及其在多个领域的变革潜力。这是向着自动驾驶和智能城市迈进的一大步,一个值得深入探索的先进技术平台。
















 4346
4346

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











