






推荐开源项目:JAGCS - 跨平台无人机地面控制站
1、项目介绍
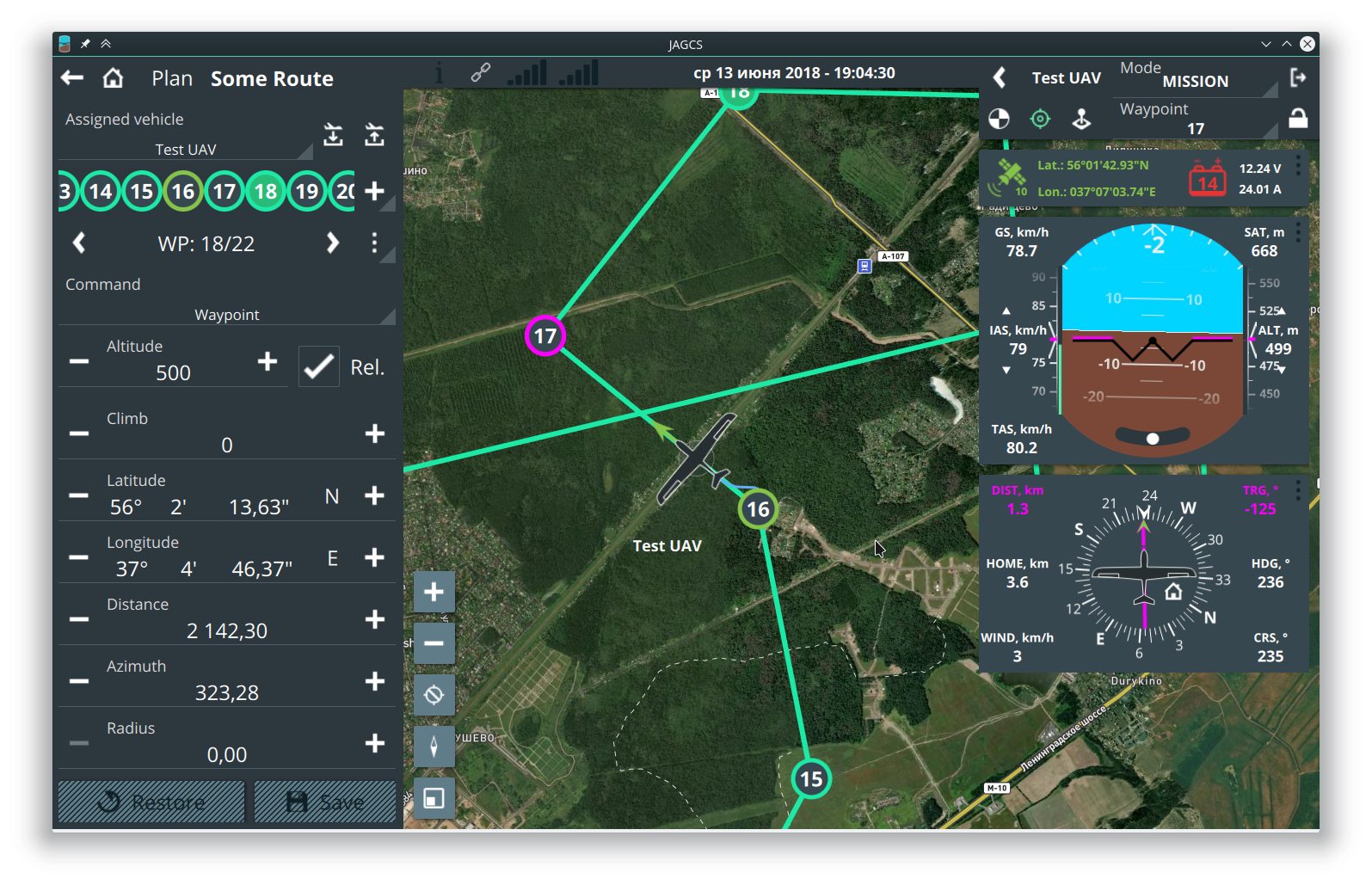
JAGCS(Joint Architecture Ground Control Station),即联合架构地面控制站,是一款开放源码的无人机地面控制系统,它的设计目标是成为通用且可扩展的解决方案。开发团队以"只是另一个地面控制站"为名,暗示其灵活多变且易于使用的特性。支持MAVLink协议的无人机,及其他信息协议的集成。
2、项目技术分析
JAGCS基于Qt框架构建,这使得它能在多种平台上运行,如Windows、Linux和Android(Mac的支持正在规划中)。为了实现强大的地图功能,项目还利用了MapBox GL,不过这需要GCC 4.9以上版本和ANGLE API(仅Windows环境下)的支持。C++14标准的采用保证了代码的现代性和效率,而CMake的使用则简化了项目的构建过程。
git clone --recursive https://github.com/MishkaRogachev/JAGCS.git
mkdir build
cd build
cmake ..
make
只需几行命令,你就可以在本地环境中编译并运行这个项目。
3、项目及技术应用场景
- 无人机监测与控制:无论是在农业巡检、环境监测,还是在灾难响应、测绘等领域,JAGCS都能提供实时、可靠的数据传输和飞行控制。
- 科研实验:对于研究人员来说,JAGCS提供了自定义和扩展的可能性,可以用于各种无人机实验或数据分析项目。
- 教育与学习:开发者可以借此了解无人机控制系统的内部工作原理,进一步探索Qt、C++14和MAVLink等技术。
4、项目特点
- 跨平台兼容:无论你的工作环境是Windows、Linux还是Android,JAGCS都为你提供一致的用户体验。
- 高度可扩展:JAGCS不仅支持MAVLink协议,还能集成其他信息协议,满足多样化需求。
- 现代化编程语言与工具:采用C++14标准,结合Qt和CMake,确保项目的稳定性和易维护性。
- 活跃的社区支持:通过Gitter社区,你可以与其他开发者交流问题,共同推动项目进步。
想要尝试一个既能满足专业需求又能适应各种场景的无人机地面控制站?不妨试试JAGCS,它也许就是你需要的答案。如果你对项目有兴趣,记得查看更新后的版本Dreka,那里有更多的新特性和改进等待着你。
















 443
443

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











