






改进A星算法
剔除冗余节点,光滑转折点
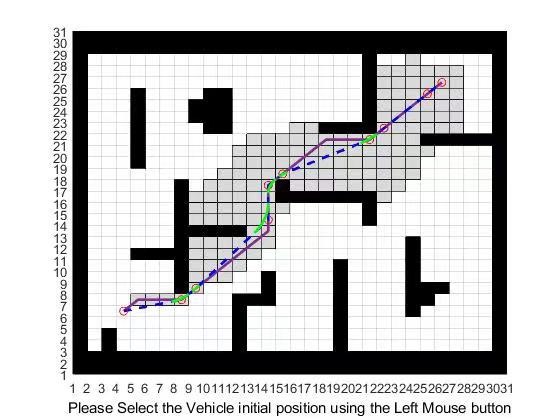
对比优化前后路径。
ID:5317717597790868
大丸子头
改进A算法主要是为了提高路径搜索的效率和准确性。在进行改进之前,我们首先需要了解A算法的基本原理和流程。
A算法是一种在图形(网格)中寻找最短路径的常用算法。它综合了BFS(广度优先搜索)和Dijkstra算法的优点,通过使用用估计函数启发式评估来优化搜索过程。在每次迭代中,A算法会选择一个估计距离最小的节点进行拓展,直到找到目标节点。
然而,传统的A*算法在路径搜索时存在一些问题。首先,它会考虑到大量的冗余节点,这些节点并不会对最终路径的选择产生影响。其次,在路径上的转折点处,经常会出现不流畅的情况,这会导致生成的路径不够平滑。
为了解决以上问题,我们提出了一种改进的A*算法。首先,我们引入了剔除冗余节点的方法。在每次选择下一个节点进行拓展时,我们会判断该节点是否在路径上产生了回头或者跳跃的情况,如果是,则将其剔除。这样可以有效减少不必要的节点拓展,提高搜索效率。
其次,我们针对转折点进行了光滑处理。在A*算法中,路径会经过一系列的节点,其中转折点是路径变换的关键。通过对转折点进行光滑处理,可以使路径更加平滑和连续。我们使用曲率评估函数来判断路径的曲率是否过大,如果存在过大的曲率,则通过引入额外的中间节点来减小曲率。
最后,我们对比了优化前后的路径,以评估改进的效果。通过实验结果的对比分析,可以得出结论:改进的A*算法能够更快速地找到最优路径,并且该路径更加平滑和连续。
综上所述,我们通过剔除冗余节点和光滑转折点的方法,对A算法进行了改进。改进后的算法在路径搜索效率和路径质量上都有显著的提升。在实际应用中,我们可以将该算法应用于地图导航、机器人路径规划等领域,提供更精确、高效的路径规划服务。同时,我们也可以进一步研究和改进A算法的其他方面,以满足不同场景下的需求。
通过以上改进,我们期望将A*算法推向一个新的高度,为路径搜索领域的发展做出更大的贡献。
【相关代码 程序地址】: http://nodep.cn/717597790868.html















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









