






路径规划-路径平滑算法,A星算法拐点的圆弧化处理,可实现对规划路径的平滑处理。
Matlab源码。
ID:799692873761403
云的歌儿
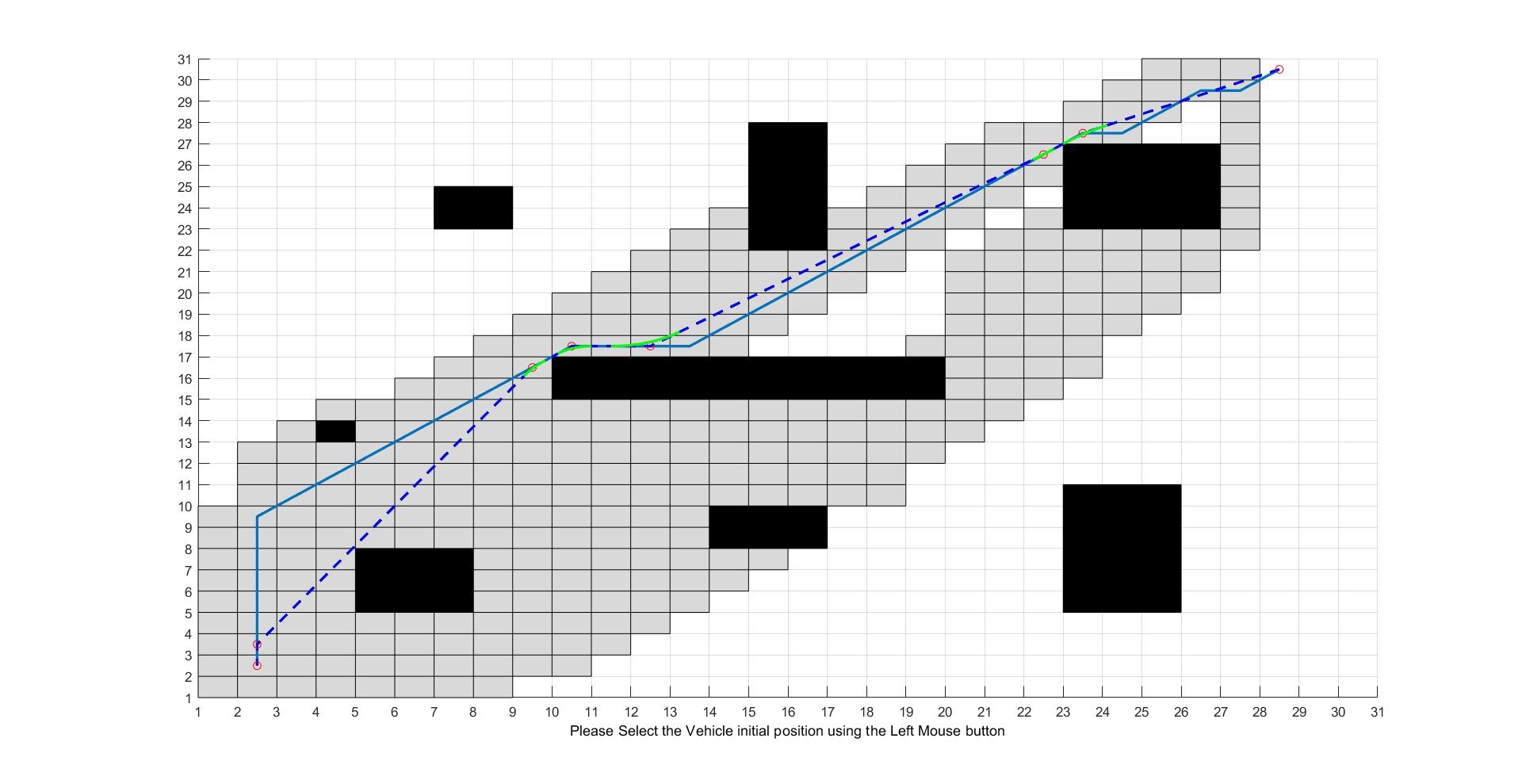
路径规划是机器人领域中的一个重要问题,在实际应用中,往往需要对规划出的路径进行平滑处理,以提高运动的流畅性和效果。本文将介绍一种路径平滑算法——A星算法拐点的圆弧化处理,以实现对规划路径的平滑处理。
路径规划是指确定机器人在环境中从起点到终点的最佳路径。传统的路径规划算法常常会生成一条由直线和折线组成的路径,这样的路径在实际运动中可能会出现急剧的转弯和抖动,影响机器人的稳定性和效果。因此,路径平滑算法的提出对于优化机器人的路径规划具有重要意义。
A星算法是一种常用的启发式搜索算法,其具有较好的效率和准确性,被广泛应用于路径规划领域。在路径平滑算法中,我们可以借助A星算法生成的路径信息,对其中的拐点进行圆弧化处理,以实现路径的平滑化。
圆弧化处理的基本思想是用圆弧来替代直角拐点,从而减少机器人运动时的急剧转弯。具体实现过程如下:
首先,我们需要获取到A星算法生成的路径信息。这里假设我们已经通过Matlab编写好了相应的路径规划算法,并得到了规划路径的坐标点序列。
接下来,我们需要对路径中的拐点进行判断。一般情况下,拐点是由路径中两个连续的线段形成的角点。我们可以通过计算两个线段之间的夹角来确定是否为拐点。
对于被确定为拐点的点,我们需要对其进行圆弧化处理。具体而言,我们可以通过计算拐点附近两个线段的斜率,得到拐点处的切线方向。然后,我们可以构造一个以拐点为圆心、以切线方向为切线的圆弧,将拐点替换为圆弧上的一段路径。
圆弧的半径可以根据实际情况进行选择。较小的圆弧半径可以使得路径更加平滑,但有可能导致机器人的运动轨迹超出预期;较大的圆弧半径可以保证机器人在规划路径范围内运动,但可能会对路径的平滑性产生一定影响。因此,在实际应用中,需要根据具体情况进行选择和调整。
经过拐点的圆弧化处理后,我们可以得到一条平滑的路径。该路径具有更好的连续性和流畅性,能够更好地适应机器人的运动需求。在实际应用中,我们可以将该路径传输给机器人控制系统,以实现机器人的自主导航和运动控制。
综上所述,A星算法拐点的圆弧化处理是一种常用的路径平滑算法。通过该算法,我们可以对规划路径进行平滑处理,提高机器人的运动效果。在实际应用中,我们可以通过Matlab源码来实现该算法,并根据具体需求进行调整和优化。通过路径平滑算法的应用,机器人的路径规划和运动控制能够更加灵活和高效。
【相关代码 程序地址】: http://nodep.cn/692873761403.html















 4380
4380











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









