









[TOC]
流程图
ConcurrenthashMap 的 transfer 主要是用于扩容重组阶段,当内部数组的容量值超过阈值时,将触发扩容重组, transfer 是该过程的主要实现。
相关概念
ConcurrentHashMap中,使用一个字段复用了多种功能,如:阈值控制、内部Node[]数组状态控制、扩容线程控制 等,该字段就是sizeCtl。
/**
* 默认为0,用来控制table的初始化和扩容操作
* -1: 代表table正在初始化
* -N: 取-N对应的二进制的低16位数值为 M=(sizeCtl&31),此时有M-1个线程进行扩容
*
* 其余情况:
* 1、如果table未初始化,表示table需要初始化的大小。
* 2、如果table初始化完成,表示table的容量,默认是table大小的0.75倍
*/
private transient volatile int sizeCtl;
ConcurrentHashMap在重组时,做法与HashMap类似,但是具体新的数组,则是使用了内部一个数组变量nextTable以保证并发控制。其他如:链表的重组、树结构的重组 流程均是大同小异。ConcurrentHashMap的重组采用了跟分段表类似的思想,实际上是将数组划分为不同的分段区间,如果有线程进入,可获取该区间辅助转换。transferIndex是ConcurrentHashMap的内部属性,主要是在重组阶段中使用,用来表示还未被转换的数组,区间为:table[0] ~ table[transferIndex-1]ConcurrentHashMap并发转换的过程,借助了 信号量 的概念,只有获取到信号的线程,才能进入辅助转换,而 信号量 则存储在sizeCtl,每当一个线程进入获取,则sizeCtl + 1(首个线程开启转换则是sizeCtl + 2)。主要注意的是,该信号量的初始值为 负数,加入线程将增大sizeCtl,直到sizeCtl的增大达到 0 时,信号量将用完,默认的与 信号量 相加等于 0 的值是:65534,也就是说,最多允许 65534 条线程参与辅助转换(非固定,可调节)。所以可通过rs + 1 ~ rs + 65534的边界控制,来决定线程是否加入辅助转换。让sizeCtl成为负数变成信号量的主要代码是:resizeStamp(n) << RESIZE_STAMP_SHIFTConcurrentHash的转换过程中,用到的辅助属性有两个:nextTable,transferIndex,它们属于线程共享的,所以在对他们进行变更时,都是使用了“自旋/死循环 + CAS”的方式,实现线程并发安全。
解析
转换过程 transfer 的每个调用入口,实际上外部都有对 sizeCtl 进行 自旋 + CAS 的操作。也就是并发情况下,即使多条线程想要进行扩容,那也只有一条线程能够成功,另外的线程则进入辅助扩容的过程
addCount
扩容方法进入前的判断如下:
private final void addCount(long x, int check) {
// 省略部分代码...
// nt -> nextTable
// n -> num,sc -> sizeCtl
Node<K, V>[] tab, nt;
int n, sc;
// 当前存储大于 75%,且总大小小于最大容量,需要扩容
while (s >= (long) (sc = sizeCtl) && (tab = table) != null && (n = tab.length) < MAXIMUM_CAPACITY) {
// resizeStamp 纯粹只是移位来保证右 16 位为0,可用来控制作为线程最大数
// 左 16 位实际并没有保留太多信息(因为明显:resizeStamp(4)、resizeStamp(5)、resizeStamp(6)、(7)
// 是相同的结果
int rs = resizeStamp(n) << RESIZE_STAMP_SHIFT;
if (sc < 0) {
// 限制线程的最大或最小,当达到最大 65534(默认) 或 1 条时,则直接跳出
// rs + 1 --> 最少线程数(相当于不正确的情况了,或者是初始化,因为起始时最少是 rs + 2)
// rs + MAX_RESIZERS --> 最多线程数
// 或其他情况,则不再辅助转移,如:nextable 已为 null 或 transferIndex <= 0(说明已结束)
// 前两个条件是限制线程数,后两个条件是扩容已经结束
if (sc == rs + MAX_RESIZERS || sc == rs + 1 || (nt = nextTable) == null || transferIndex <= 0)
break;
if (U.compareAndSetInt(this, SIZECTL, sc, sc + 1))
transfer(tab, nt);
}
// 如果 sc >= 0,说明是刚开始,
// 因为 sc < 0 时,低16位表示有多少条线程在进行转移:sizeCtl & 31 - 1
// 所以这里要 rs + 2
else if (U.compareAndSetInt(this, SIZECTL, sc, rs + 2))
transfer(tab, null);
s = sumCount();
}
}
这里出现大量的判断比较,容易造成混乱,但主要记住:这些判断比较,在 ConcurrentHashMap 大部分是边界判断。记住这点后能够帮助理解大部分的判断比较,比如:sc == rs + MAX_RESIZERS 和 sc == rs + 1实际上是对线程数的上下界的限制,超过限制,则不进入辅助转换。
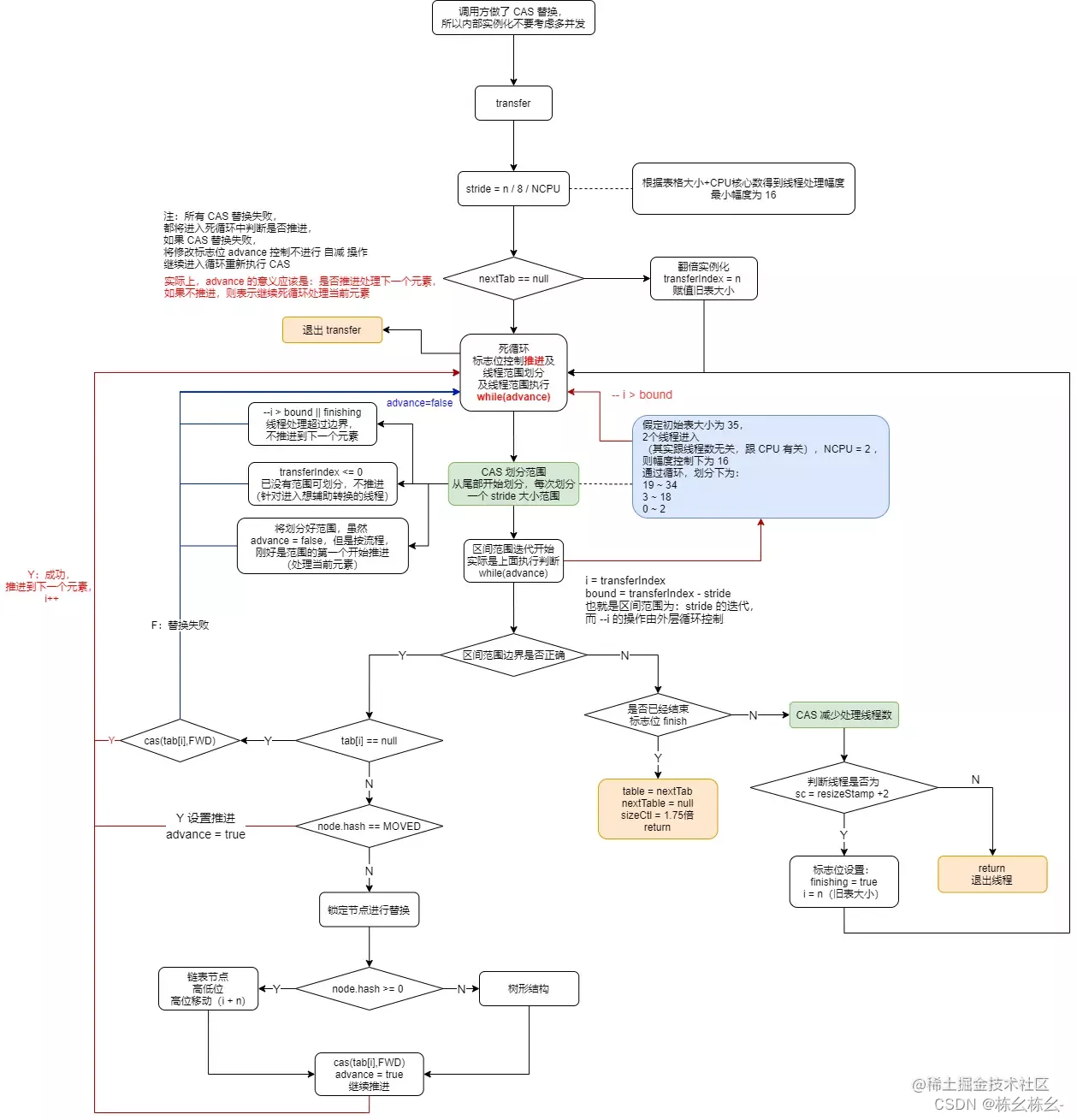
transfer
ConcurrentHashMap 是分段进行并发转换,就是一个数组,按 幅度 划分,然后相应的线程获取到哪个分组,则负责该分组的转换的完成。那么重组转换的出口在哪里呢?只有当所有线程都执行完毕,处理转换的线程的信号量没有被获取了 ,才退出整个转换过程。默认最小幅度是 16,也就是说线程的最少处理元素个数是 16 个。
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
// stride 幅度
int n = tab.length, stride;
// 如果 CPU 大于 1,控制最少每个线程的处理量为 16 ==> n / 8 / NCPU
if ((stride = (NCPU > 1) ? (n >>> 3) / NCPU : n) < MIN_TRANSFER_STRIDE)
stride = MIN_TRANSFER_STRIDE; // subdivide range
if (nextTab == null) { // initiating
try {
// 数组翻倍,为什么要多出一个赋值操作?是因为 new 操作可能异常?貌似也不影响
@SuppressWarnings("unchecked")
Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n << 1];
nextTab = nt;
} catch (Throwable ex) { // try to cope with OOME
// 失败,直接增加数组大小,退出
sizeCtl = Integer.MAX_VALUE;
return;
}
// 因为本方法的外层调用都使用了 CAS,所以可以保证此赋值的正确性(多线程情况下)
nextTable = nextTab;
// table 大小,最开始的转换范围是原数组大小
transferIndex = n;
}
//...
}
进入转换方法后,首先就是确定线程处理幅度,然后初始化 nextTable (如果需要的话),并初始化转换过程中需要用到的一些辅助属性,如:transferIndex = n = table.length。
接下来,就是一个死循环(假象)。死循环内嵌死循环。第一个死循环使用到了局部参数 i 和 bound,实际上,在每个线程进入该方法后,都会获得自己这两个局部变量值,而它们的值变动则是在内部循环中开始赋值,一旦赋值成功,那么第一个死循环就变成了一个有界的 for 循环
优先看第二个内部循环, advance 变量控制了该循环。advance 变量主要表示:是否推进到下一个元素。它实际与 i 和 bound是有逻辑关系的,一旦 i 和 bound的关系不匹配,那么 advance 也就必须为 false,不再让线程进行推进,推进的操作是( --i )。也就是说,线程进入后,将有三个变量控制其运行,其中 bound, i是线程处理的数组边界,而 advance 则控制线程在这个边界中进行移动
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
// ... 省略部分代码
int nextn = nextTab.length;
ForwardingNode<K,V> fwd = new ForwardingNode<K,V>(nextTab);
// 是否推进到下一个元素,false 则表示还是处理当前元素
boolean advance = true;
boolean finishing = false; // to ensure sweep before committing nextTab
for (int i = 0, bound = 0;;) {
// f -> findNode;fh -> findNode hash
Node<K,V> f; int fh;
// 死循环主要是为了划分线程处理区间 !还有控制元素推进
while (advance) {
int nextIndex, nextBound;
// 死循环标志位,不断死循环执行处理,没有太多意义,纯粹依靠标志位
// 每一个线程进来,第一个判断都不成立
// 通过 --i 来控制线程处理区间的推进,
// 如果 --i > bound 说明区间范围超过线程的处理范围,线程不再该范围内就行推进,标志位为false
// 每一次划分完,则 i 实际上是闭区间的尾部,而 bound 则为区间的首部,所以 --i 成功,进入区间下一个元素处理
if (--i >= bound || finishing)
advance = false;
else if ((nextIndex = transferIndex) <= 0) {
// 赋值 nextIndex
// 小于0 :表已被划分完,不再作划分推进,跳出循环
i = -1;
advance = false;
}
else if (U.compareAndSetInt
(this, TRANSFERINDEX, nextIndex,
nextBound = (nextIndex > stride ?
nextIndex - stride : 0))) {
// CAS 替换值,将 transferIndex 更新为 transferIndex - stride
// 控制此线程的处理区间为:bound ~ (nextIndex - 1)
// 假定初始表大小为 35,2个线程进入(其实跟线程数无关,跟 CPU 有关),NCPU = 2 ,则幅度控制下为 16
// 通过循环,划分下为:
// 19 ~ 34
// 3 ~ 18
// 0 ~ 2
// 也就说,transfer 的处理,(单线程)是从尾部到头部(当然总体情况下多线程则取决于线程的执行情况)
bound = nextBound;
i = nextIndex - 1;
advance = false;
}
}
// ... 省略部分代码
}
可以看到,内部死循环的主要作用,其实是为了划分分区(划分幅度为 stride),也可以意识到,即使是单线程,其执行也是按分区执行,并且执行的分区顺序是从尾部到首部。通过 CAS 保证分区的划分的线程安全,失败则重新循环再次操作。
划分完分区后,剩下的就是线程的处理过程。处理过程包括 2 部分,一部分是普通的元素处理,一部分是边界控制——退出出口。
在每一个元素的处理过程中,线程都会先判断是否到达出口,是则退出?差不离,但退出包含两种情况,一种是普通的辅助线程的退出,它只擦自己的屁股,另外一种是整体线程的退出,它除了处理负责自己的退出出口,还要负责将重组后的结果 nextTable 重复赋值给 table,并为 sizeCtl 赋值为新数组大小的 0.75 倍的阈值
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
// ... 省略部分代码
// 如果 i < 0 || i >= n || i + n >= nextn ,都属于区间的边界判断
// 超过边界则判断是否线程都已执行完毕,其实只有首尾区间的线程会触发到这个判断,
// 其他的线程因为 stride < i < 2stride,所以不会触发此判断
if (i < 0 || i >= n || i + n >= nextn) {
int sc;
// 扩容出口
// 只有当 finishing 为 true 时,才真正将 nextTable 赋值给 旧 table 指针
// 而 finishing 为 true 的唯一条件,是所有的线程都执行完毕
if (finishing) {
nextTable = null;
table = nextTab;
// 翻倍减去 0.25 ,为新数组大小的 0.75 倍的阈值
sizeCtl = (n << 1) - (n >>> 1);
return;
}
if (U.compareAndSetInt(this, SIZECTL, sc = sizeCtl, sc - 1)) {
if ((sc - 2) != resizeStamp(n) << RESIZE_STAMP_SHIFT)
return;
// 只有当所有的线程都执行完毕,才能保证 finishing 为 true
finishing = advance = true;
i = n; // recheck before commit
}
}
// ... 省略部分代码
}
说完了边界出口,剩下的就是普通的操作了,有以下判断:
- 当线程转换时旧数组对应位置上为
null,则直接CAS替换为ForwardingNode(其hash = MOVED),表示转移过了;此时,当外部有操作put刚好命中此位置时,将会进入辅助转换的过程,判断依据就是if (hash == MOVED)。也就是说,在重组转换过程中,进行put操作,将进入辅助转换过程。 - 如果
hash 为 MOVED,则表示该位置已被其他线程转移过,推进到下一个元素
最后,进入与 HashMap 相同的链表重组和树结构重组的逻辑中,成功执行后,advance = true,继续推进处理元素(--i)。这里比 HashMap 多出一步,就是将旧数组对应位置上的标记为已处理。
private final void transfer(Node<K,V>[] tab, Node<K,V>[] nextTab) {
// ... 省略部分代码
else if ((f = tabAt(tab, i)) == null)
advance = casTabAt(tab, i, null, fwd); // 如果旧表该位置为null,则标记为已处理
else if ((fh = f.hash) == MOVED) // 感觉不太可能遇到,毕竟线程单一负责自己的区域(?)
advance = true; // already processed
else {
// 进入转换
synchronized (f) {
if (tabAt(tab, i) == f) {
Node<K,V> ln, hn;
// 普通链表的 hash 节点是正常的 hash 码,树节点的 hash 则默认小于 0
// 重哈希算法与 HashMap 相同,都是以 2的n次幂 对应的二进制刚好为 1,
// 直接移动高位部分元素
if (fh >= 0) {
// ... 省略部分代码
}
else if (f instanceof TreeBin) {
// ... 省略部分代码
setTabAt(nextTab, i, ln);
setTabAt(nextTab, i + n, hn);
// 处理完成后,将旧数组的节点标记为已处理(旧数据将没有数据)
setTabAt(tab, i, fwd);
advance = true;
}
}
}
}
}
至此,整个 ConcurrentHashMap 的转换过程算完了
















 260
260











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











