






stm32电磁寻迹智能车,HAL库,cubeMX配置,寻迹程序代码工程,stm32f411程序,小车底板集成pcb,三叉,归一化,差比和,滤波算法,分段pid,已完成
有pcb原理图,另外程序代码注释完善,容易移植,代码易懂。
可提供一定。
工程代码原理图PCB
发本工程全部资料和代码程序。
ID:88200666301319788
嵌入式工程狮


STM32电磁寻迹智能车——从HAL库到CubeMX配置
引言:
在智能交通领域,电磁寻迹智能车作为一种基础应用,已经成为研究和开发的热点之一。本文将介绍一种基于STM32电磁寻迹智能车的设计方案,并详细介绍相关的HAL库、CubeMX配置、寻迹程序代码工程以及使用的STM32F411程序等内容。此外,我们还提供了小车底板集成PCB设计、三叉传感器、归一化、差比和、滤波算法以及分段PID等技术细节,以便读者更好地理解和应用。
一、STM32电磁寻迹智能车的设计概述
-
设计目标
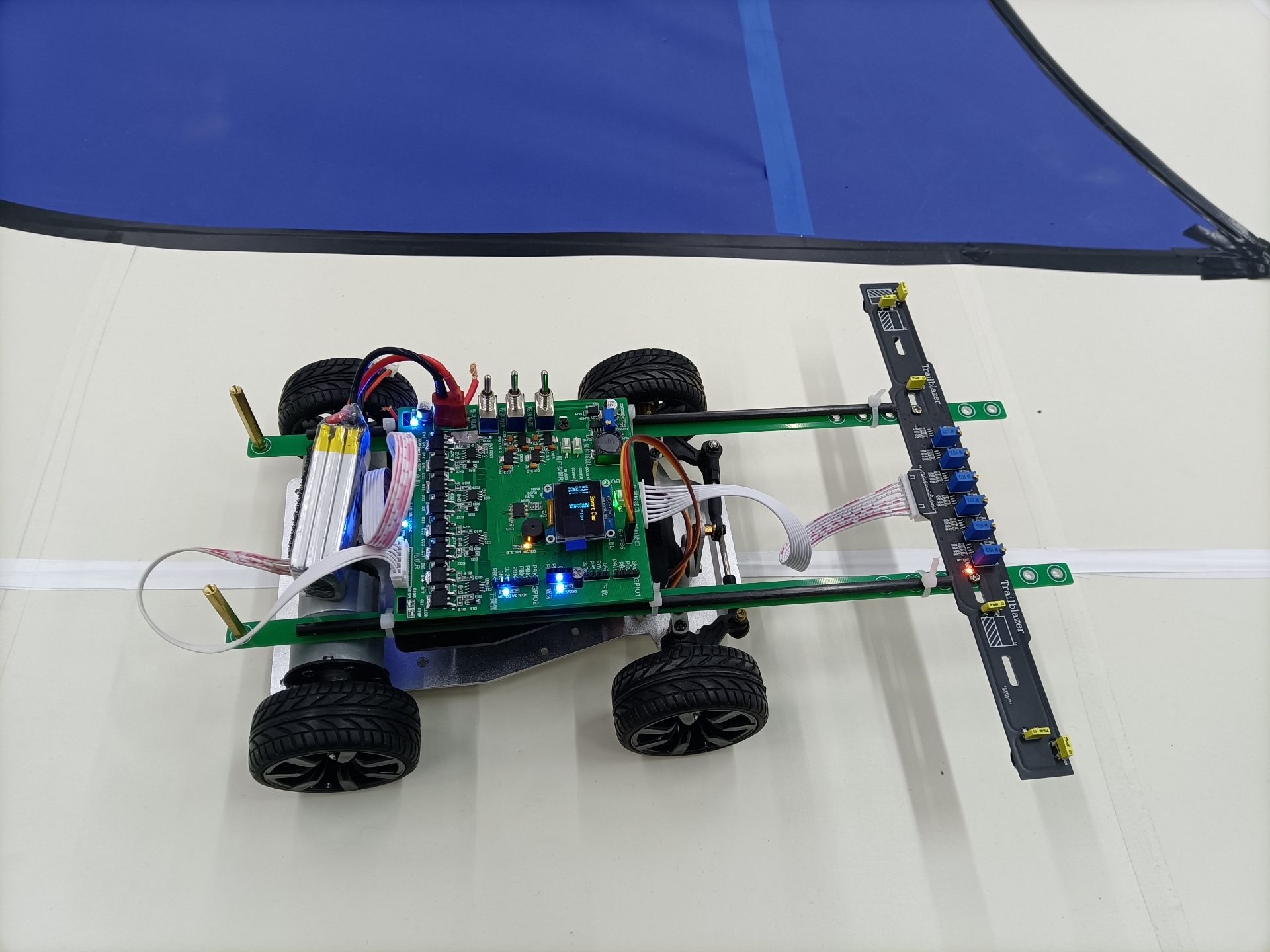
本次设计旨在实现一款功能完备、性能优越的电磁寻迹智能车。通过使用STM32微控制器和相关的开发工具,我们将实现车辆的自动导航和路径规划功能。 -
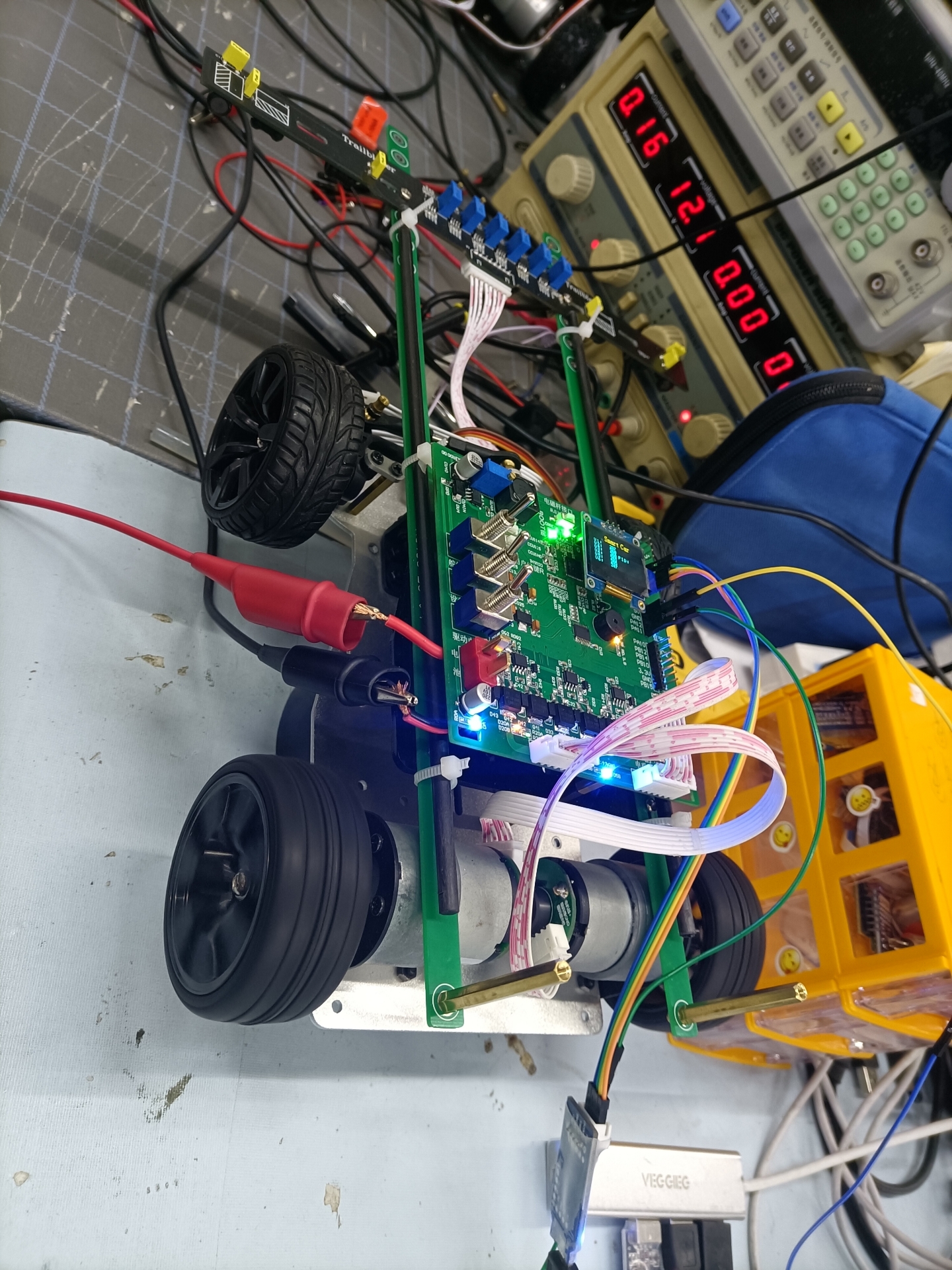
硬件架构
本项目采用的硬件架构主要包括STM32F411微控制器、电磁传感器、电机驱动模块和车轮等组件。其中,STM32F411微控制器是整个智能车系统的核心,起到控制和协调各个模块的作用。 -
软件架构
软件架构方面,本项目采用HAL库进行开发,通过CubeMX配置工具进行初始化和相关参数的设置。在寻迹程序代码工程中,我们充分利用了STM32F411的强大计算和处理能力,实现了车辆的电磁寻迹和导航功能。
二、HAL库和CubeMX配置
-
HAL库介绍
HAL(Hardware Abstraction Layer)库是一种用于硬件抽象的软件库。它提供了一组函数和接口,实现了对硬件底层操作的封装,使得开发者可以直接调用这些函数和接口,而不需要了解底层硬件的具体细节。在本项目中,我们使用了HAL库来简化对STM32F411微控制器的操作,提高开发效率。 -
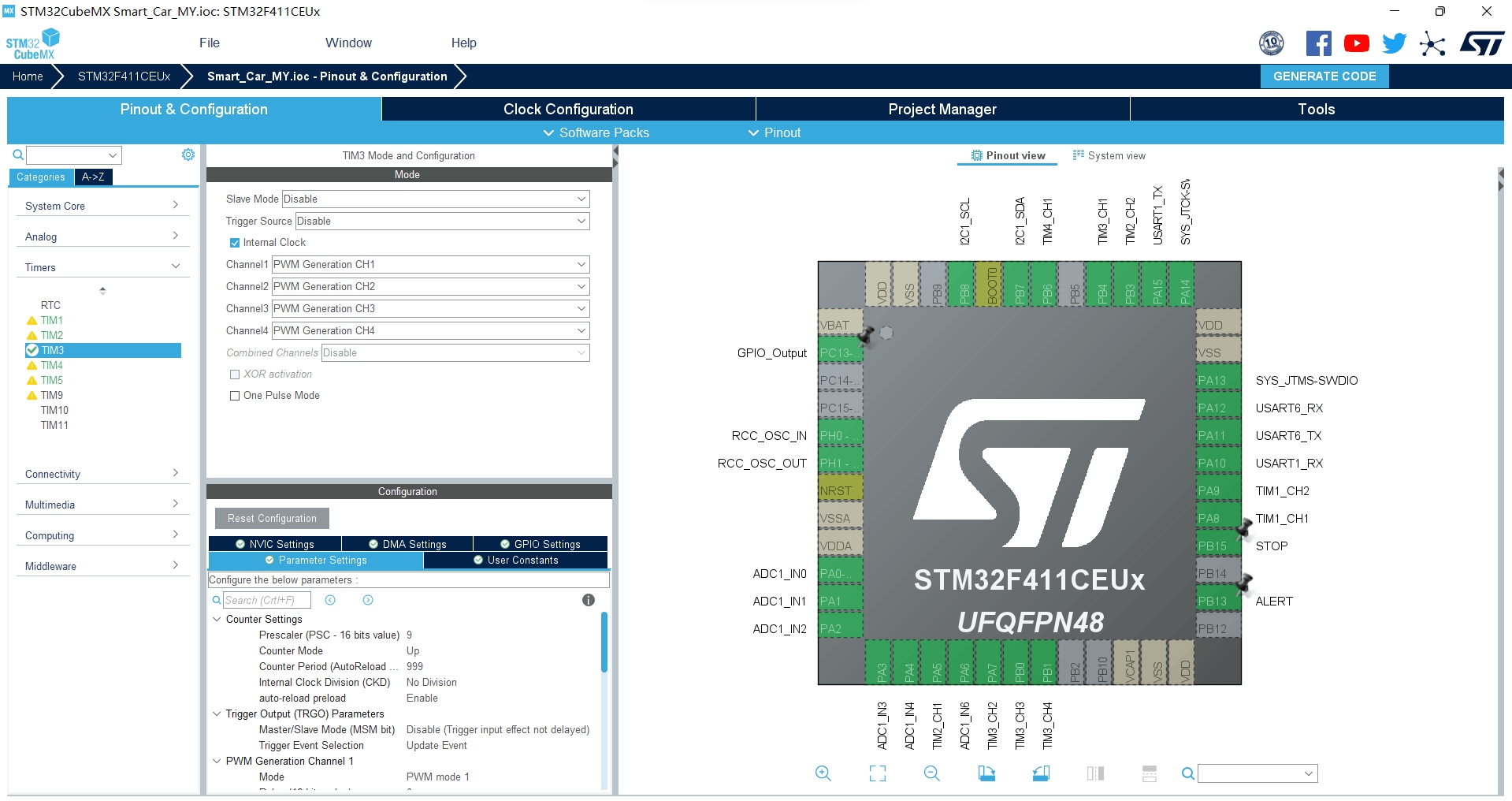
CubeMX配置
CubeMX是一种开发工具,用于支持使用HAL库进行STM32微控制器的配置和初始化。通过CubeMX,我们可以方便地设置相关的参数,包括时钟频率、外设功能等,从而充分发挥STM32F411微控制器的性能优势。在本项目中,我们使用了CubeMX进行对电磁传感器和电机驱动模块的配置。
三、寻迹程序代码工程和STM32F411程序
-
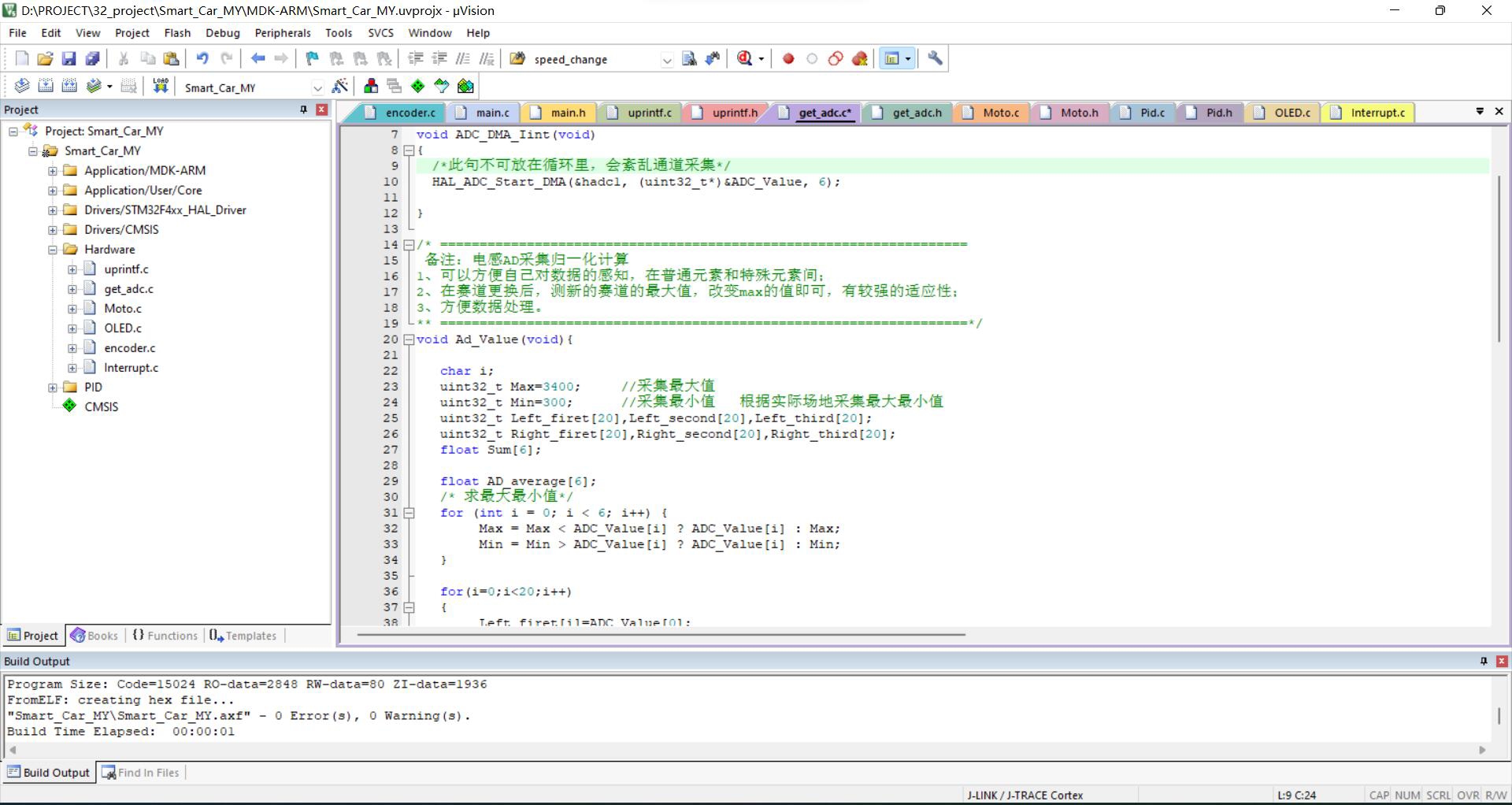
寻迹程序代码工程
寻迹程序代码工程是整个智能车系统的核心部分。在该工程中,我们通过对电磁传感器的输入信号进行差比和、滤波等处理,实现对车辆行驶路径的精确判断和控制。此外,我们还使用分段PID算法来调节电机驱动模块,以实现车辆的平稳行驶和转弯。 -
STM32F411程序
STM32F411程序是在寻迹程序代码工程的基础上进一步开发和优化得到的。通过充分发挥STM32F411微控制器的强大计算和处理能力,我们优化了寻迹算法和PID控制算法,提高了车辆的行驶稳定性和精确性。
四、小车底板集成PCB设计和三叉传感器
-
小车底板集成PCB设计
为了进一步提高整个智能车系统的集成度和稳定性,我们设计了一款小车底板集成PCB。该PCB集成了电磁传感器、电机驱动模块以及STM32F411微控制器等核心部件,同时提供了丰富的接口和扩展功能,方便开发者进行二次开发和优化。 -
三叉传感器
三叉传感器是智能车系统中的重要组成部分。通过利用三叉传感器,我们可以实时获取车辆周围环境的电磁信号,并对其进行差
相关的代码,程序地址如下:http://nodep.cn/666301319788.html
















 1462
1462

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









