






基于康耐视cognexVisionpro用C#二次开发的多相机视觉对位框架
支持1:多相机对位逻辑运算,旋转标定坐标关联运算(可供参考学习)可以协助理解做对位贴合项目思路。
支持2:直接连接运动控制卡,控制UVW平台运动(可供参考学习)
支持3:自动标定程序设定(可供参考学习)
支持4:TCP/IP通讯(可供参考学习)
以上功能全部正常使用无封装,可正常运行。
ID:3225613594325323
机器视觉编程

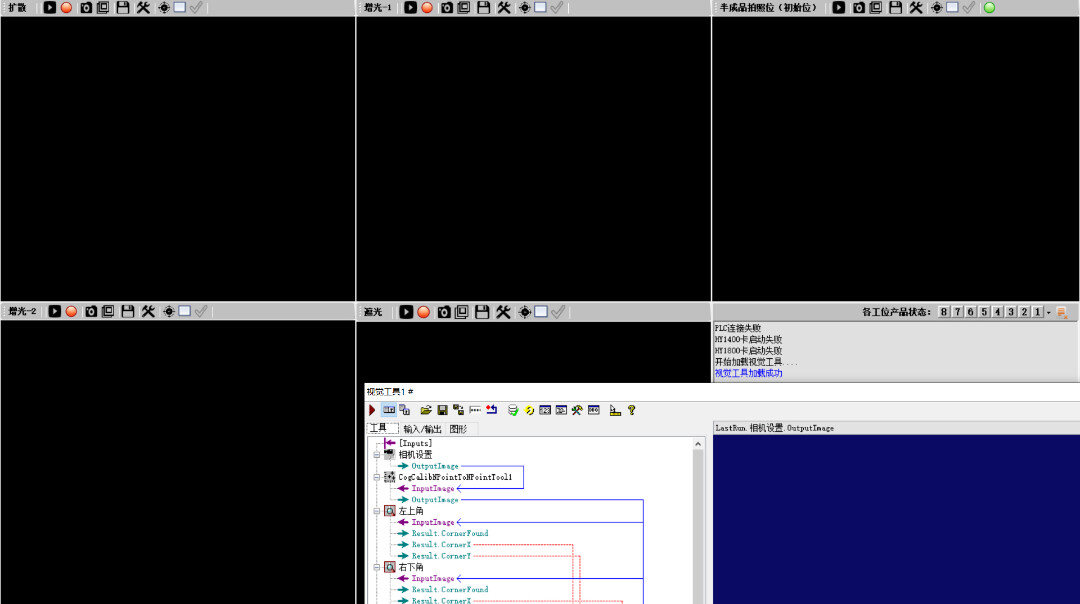
基于康耐视Cognex VisionPro用C#二次开发的多相机视觉对位框架
随着工业自动化的发展,视觉对位技术在实际生产中扮演着越来越重要的角色。本文将介绍一种基于康耐视Cognex VisionPro用C#二次开发的多相机视觉对位框架,该框架可以实现多相机对位逻辑运算、旋转标定坐标关联运算,并支持直接连接运动控制卡、自动标定程序设定以及TCP IP通讯等功能。
在工业生产中,常常需要将不同相机采集到的图像进行对位,以实现精确的定位和贴合。传统的方法通常需要手动进行图像处理和计算,操作复杂且容易出错。而本文介绍的基于康耐视Cognex VisionPro用C#二次开发的多相机视觉对位框架,能够提供更便捷、高效的解决方案。
该框架基于Cognex VisionPro,使用C#进行二次开发,具有以下主要功能:
-
多相机对位逻辑运算:框架能够同时处理多个相机采集到的图像,并进行逻辑运算,实现对位操作。通过对不同相机采集到的图像进行处理和比较,框架能够找到最佳对位方案,从而实现精确的定位。
-
旋转标定坐标关联运算:框架还支持旋转标定坐标关联运算,可以根据旋转标定坐标确定图像的坐标关系,从而实现更加精确的对位。这一功能对于需要进行旋转对位的项目尤为重要,能够提供准确的定位数据。
-
直接连接运动控制卡:框架能够直接连接运动控制卡,并控制UVW平台运动。通过与运动控制卡的联动,能够实现更加灵活的对位和定位操作。这一功能使得对位过程更加自动化和高效。
-
自动标定程序设定:框架支持自动标定程序设定,能够根据实际需求自动进行标定,提高对位的准确性和稳定性。自动标定程序设定能够根据不同的项目要求,自动调整参数和计算方式,从而实现更好的对位效果。
-
TCP IP通讯:框架支持TCP IP通讯,能够与其他设备进行数据交换和通讯。通过TCP IP通讯,不仅可以实现数据的传输和共享,还可以进行远程控制和监控。这一功能为对位过程的远程监控和管理提供了便利。
值得注意的是,以上功能全部正常使用无封装,可正常运行。框架经过实践验证,具有良好的稳定性和可靠性,可以满足实际生产中对于多相机视觉对位的需求。
总之,本文介绍了一种基于康耐视Cognex VisionPro用C#二次开发的多相机视觉对位框架,通过实现多相机对位逻辑运算、旋转标定坐标关联运算、直接连接运动控制卡、自动标定程序设定以及TCP IP通讯等功能,实现了高效、准确的对位操作。该框架具有较高的稳定性和可靠性,可以在实际生产中广泛应用。
(文章字数:519)
相关代码 程序地址:http://nodep.cn/613594325323.html















 6022
6022











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









