






西门子1200plc程序实例,伺服,rs232通讯协议位移传感器,交流调速电机。
portal v14 v15版本程序都有。

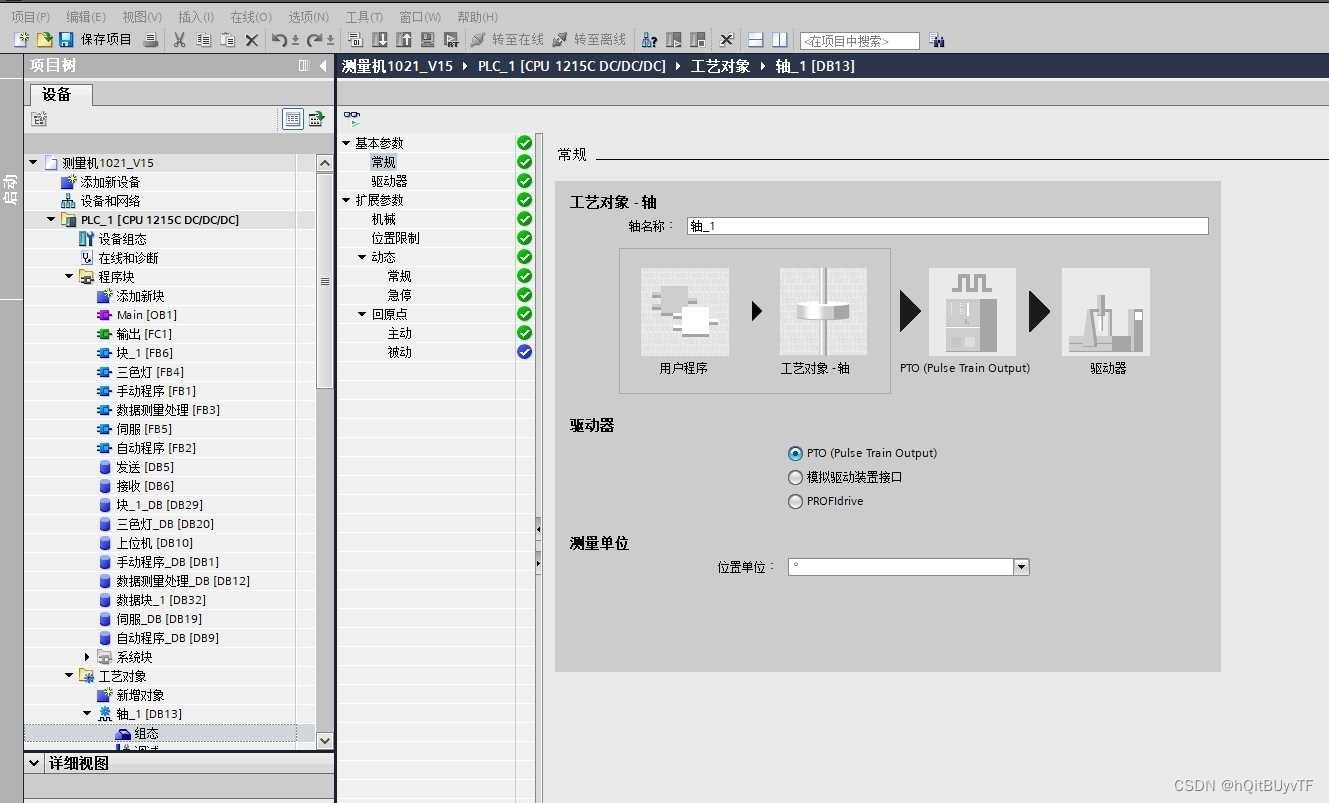

西门子1200PLC程序实例,伺服,RS232通讯协议,位移传感器,交流调速电机。对于程序员而言,掌握这些技术是非常重要的,因为它们在工业自动化领域中扮演着重要角色。本文将围绕这几个关键词展开,分析它们的原理、应用和优势。
首先,让我们先来了解一下西门子1200PLC。PLC全称为可编程逻辑控制器,它是一种专门用于工业自动化领域的控制设备。西门子1200PLC是西门子公司推出的一款中小型PLC产品,广泛用于各种工业控制系统中。它具有高稳定性、灵活性和可编程性的特点,使其在工业自动化中得到了广泛应用。
伺服系统是指利用伺服电机进行精密控制的系统。伺服电机是一种特殊的电动机,它通过对电机控制信号进行反馈调整,实现精确的位置、速度和力度控制。伺服技术在工业自动化领域中广泛应用,例如机械加工、机器人控制等。
RS232是一种常用的串行通信协议,它通过串行端口将数据以二进制形式传输。RS232通信协议具有简单、可靠的特点,被广泛应用于各种通信设备中。在工业自动化领域中,RS232通信协议常用于PLC和外部设备之间的数据传输和通信。
位移传感器是一种测量物体位移的装置,它可以将物体的位移转换为电信号,用于实时监测和控制系统中。位移传感器在工业自动化中有着广泛的应用,例如机械加工、材料输送等领域。
交流调速电机是一种可以通过调节电源频率或电压来改变转速的电机。它具有调速范围广、精度高、响应速度快的特点,并且能够实现更加精确的控制。交流调速电机在工业自动化中广泛应用于轧钢、机械加工、风机控制等领域。
在进行PLC程序设计时,我们可以使用西门子Portal V14和V15版本。Portal V14和V15是西门子公司推出的PLC编程软件,它提供了丰富的功能和工具,方便程序员进行程序开发和调试。使用Portal V14和V15,程序员可以灵活地进行程序设计,并实现各种功能。
综上所述,西门子1200PLC程序实例、伺服、RS232通讯协议、位移传感器、交流调速电机等技术在工业自动化领域中具有重要的地位和作用。掌握这些技术对于程序员而言是必不可少的。
相关代码,程序地址:http://lanzoup.cn/674786982427.html















 1036
1036











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









