






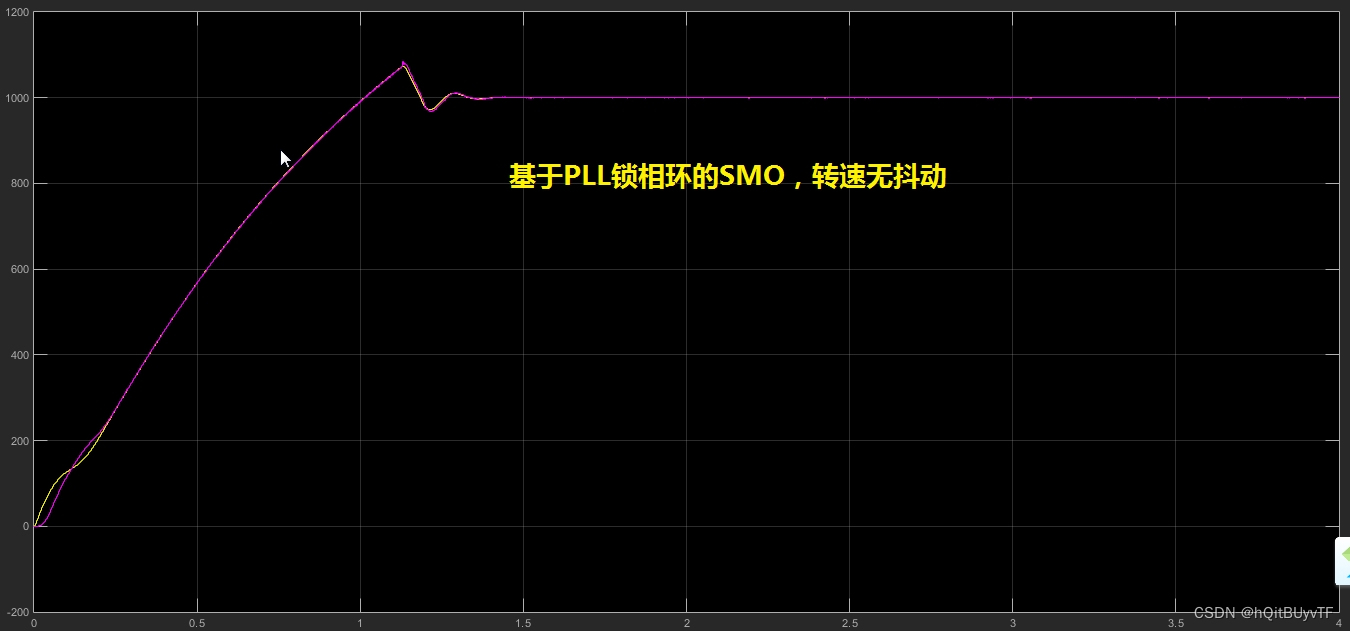
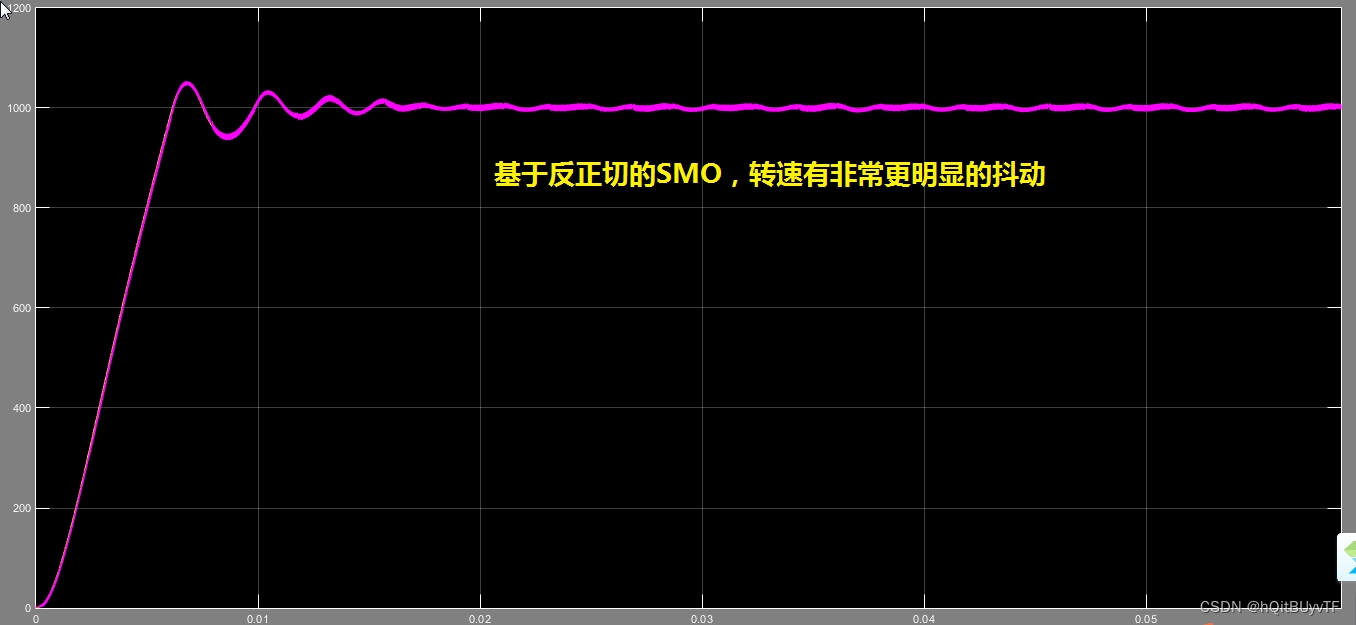
基于PLL的SMO滑模观测器算法,永磁同步电机无传感器矢量控制,跟基于反正切的SMO做对比,可以有效消除转速的抖动。
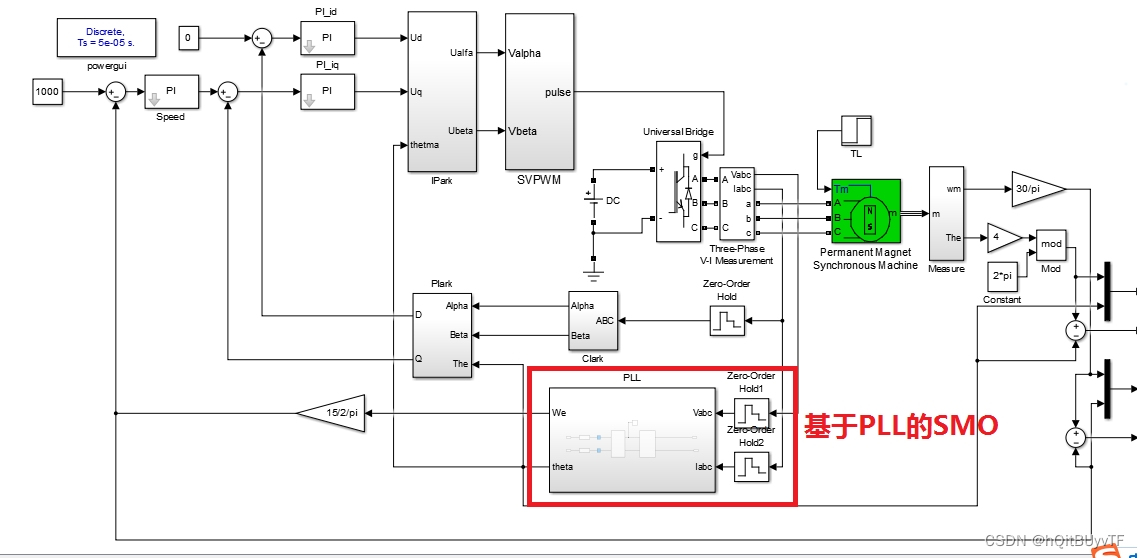
基于PLL的SMO滑模观测器算法在无传感器矢量控制中的应用
引言:
随着信息技术的快速进步,无传感器矢量控制成为了现代电机控制领域的一项重要技术。在无传感器矢量控制中,精确估计电机转速对于实现准确控制至关重要。
传统的无传感器矢量控制方法中使用的滑模观测器(Sliding Mode Observer,SMO)算法能够有效地估计电机转速,但在实际应用中存在转速抖动的问题。为了解决这个问题,本文提出了一种基于相位锁定环路(Phase-Locked Loop,PLL)的SMO滑模观测器算法,该算法能够显著降低转速抖动,提高系统控制性能。
一、SMO滑模观测器算法原理
滑模观测器是一种基于滑模理论的估计算法,在无传感器矢量控制中被广泛应用。其原理是通过引入滑模面,在滑模面上实时观测电机状态并估计转速。
基于SMO的估计算法可用于无传感器矢量控制中,但在实际应用中,由于环境噪声和参数摄动的存在,传统的SMO算法存在转速抖动的问题。为了解决这个问题,本文提出了一种基于PLL的SMO滑模观测器算法。
二、基于PLL的SMO滑模观测器算法设计
1. PLL原理
PLL是一种常用的控制系统技术,在通信和电力电子等领域有广泛应用。其主要原理是通过将参考信号与系统输出信号进行比较,调整控制参数来实现精确的锁相跟踪。
在基于PLL的SMO滑模观测器算法中,我们利用PLL的相位锁定环路来对电机转速进行估计。通过将锁相环路的参考信号与滑模观测器输出的估计值进行比较,我们可以实时调整PLL的参数,使得估计值与实际值更加接近,从而减小转速抖动。
2. SMO滑模观测器算法设计
基于PLL的SMO滑模观测器算法主要包括以下几个步骤:
(1)滑模面设计:根据电机的动态特性和系统要求,设计适当的滑模面,以实现对电机状态的观测。
(2)PLL参数调节:通过比较PLL的参考信号和滑模观测器输出的估计值,实时调节PLL的参数,使得估计值逼近实际值。
(3)状态观测和估计:根据滑模面方程,通过观测电机状态和估计滑模面交点,实现对电机状态的估计。
(4)转速抖动消除:通过不断调节滑模面和PLL的参数,减小转速抖动,提高系统控制性能。
三、基于PLL的SMO滑模观测器算法实验与结果分析
为了验证基于PLL的SMO滑模观测器算法的有效性,我们进行了一系列实验并对结果进行了分析。
实验结果表明,相比传统的基于反正切的SMO算法,基于PLL的SMO滑模观测器算法能够显著降低转速抖动。在不同速度和负载条件下,基于PLL的SMO滑模观测器算法都能够实现准确的转速估计,提高系统控制性能。
结论:
本文提出了一种基于PLL的SMO滑模观测器算法,通过引入PLL的相位锁定环路,增强了SMO算法对电机转速的估计能力。实验结果表明,该算法能够有效消除转速抖动,并提高系统的控制性能。基于PLL的SMO滑模观测器算法在无传感器矢量控制中有广泛的应用前景,为实现高性能无传感器矢量控制提供了新的解决方案。
相关代码,程序地址:http://lanzoup.cn/675387822737.html


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









