









RTEMS目前多数采用nexus总线进行设备管理,但这是一种较老的方法,目前linux和FreeBSD都改为采用FDT(Flatten Device Tree)进行设备管理,无论是ARM还是PowerPC等。接下来讲讲如何在RTEMS上实现FDT,以BBB为例:
FDT需要dtb文件支持,该文件是二进制文件,包含了设备树,Linux和FreeBSD都可以自动生成该文件,通过dts文件生成,但RTEMS目前不支持,因此dtb文件从FreeBSD参考过来,dts文件如下所示:
/*
* Device Tree Source for AM33XX SoC
*
* Copyright (C) 2012 Texas Instruments Incorporated - http://www.ti.com/
*
* This file is licensed under the terms of the GNU General Public License
* version 2. This program is licensed "as is" without any warranty of any
* kind, whether express or implied.
*/
#include <dt-bindings/gpio/gpio.h>
#include <dt-bindings/pinctrl/am33xx.h>
#include "skeleton.dtsi"
/ {
compatible = "ti,am33xx";
interrupt-parent = <&intc>;
aliases {
i2c0 = &i2c0;
i2c1 = &i2c1;
i2c2 = &i2c2;
serial0 = &uart0;
serial1 = &uart1;
serial2 = &uart2;
serial3 = &uart3;
serial4 = &uart4;
serial5 = &uart5;
d_can0 = &dcan0;
d_can1 = &dcan1;
usb0 = &usb0;
usb1 = &usb1;
phy0 = &usb0_phy;
phy1 = &usb1_phy;
ethernet0 = &cpsw_emac0;
ethernet1 = &cpsw_emac1;
};
cpus {
#address-cells = <1>;
#size-cells = <0>;
cpu@0 {
compatible = "arm,cortex-a8";
device_type = "cpu";
reg = <0>;
/*
* To consider voltage drop between PMIC and SoC,
* tolerance value is reduced to 2% from 4% and
* voltage value is increased as a precaution.
*/
operating-points = <
/* kHz uV */
720000 1285000
600000 1225000
500000 1125000
275000 1125000
>;
voltage-tolerance = <2>; /* 2 percentage */
clocks = <&dpll_mpu_ck>;
clock-names = "cpu";
clock-latency = <300000>; /* From omap-cpufreq driver */
};
};
pmu {
compatible = "arm,cortex-a8-pmu";
interrupts = <3>;
};
/*
* The soc node represents the soc top level view. It is used for IPs
* that are not memory mapped in the MPU view or for the MPU itself.
*/
soc {
compatible = "ti,omap-infra";
mpu {
compatible = "ti,omap3-mpu";
ti,hwmods = "mpu";
};
};
文件太大,限于篇幅不全部展示了,可以在FreeBSD/sys/gnu/dts/arm目录下找到该文件。
接下来就是要让BBB从U-Boot启动时,U-Boot采用这个dtb文件中的设备信息,并且在bsp启动阶段传递给BBB。bsp的启动部分是由start.S文件完成的,因此需要对start.S文件进行修改。
c/stc/lib/libbsp/arm/shared/start/start.S
/**
* @file
*
* @brief Boot and system start code.
*/
/*
* Copyright (c) 2008, 2016 embedded brains GmbH. All rights reserved.
*
* embedded brains GmbH
* Dornierstr. 4
* 82178 Puchheim
* Germany
* <rtems@embedded-brains.de>
*
* The license and distribution terms for this file may be
* found in the file LICENSE in this distribution or at
* http://www.rtems.org/license/LICENSE.
*/
#include <rtems/asm.h>
#include <rtems/system.h>
#include <rtems/score/percpu.h>
#include <bspopts.h>
#include <bsp/irq.h>
#include <bsp/linker-symbols.h>
/* External symbols */
.extern bsp_reset
.extern boot_card
.extern bsp_start_hook_0
.extern bsp_start_hook_1
.extern bsp_stack_irq_end
.extern bsp_stack_fiq_end
.extern bsp_stack_abt_end
.extern bsp_stack_und_end
.extern bsp_stack_svc_end
#ifdef RTEMS_SMP
.extern bsp_stack_all_size
#endif
.extern _ARMV4_Exception_undef_default
.extern _ARMV4_Exception_swi_default
.extern _ARMV4_Exception_data_abort_default
.extern _ARMV4_Exception_pref_abort_default
.extern _ARMV4_Exception_reserved_default
.extern _ARMV4_Exception_interrupt
.extern _ARMV4_Exception_fiq_default
.extern _ARMV7M_Exception_default
#ifdef BSP_START_NEEDS_REGISTER_INITIALIZATION
.extern bsp_start_init_registers_core
.extern bsp_start_init_registers_banked_fiq
.extern bsp_start_init_registers_vfp
#endif
#ifdef BSP_START_IN_HYP_SUPPORT
.extern bsp_start_arm_drop_hyp_mode
.globl bsp_start_hyp_vector_table_begin
#endif
/* Global symbols */
.globl _start
.globl bsp_start_vector_table_begin
.globl bsp_start_vector_table_end
.globl bsp_start_vector_table_size
.globl bsp_vector_table_size
.globl bsp_start_hook_0_done
.section ".bsp_start_text", "ax"
#if defined(ARM_MULTILIB_ARCH_V4)
.arm
/*
* This is the exception vector table and the pointers to the default
* exceptions handlers.
*/
bsp_start_vector_table_begin:
ldr pc, handler_addr_reset
ldr pc, handler_addr_undef
ldr pc, handler_addr_swi
ldr pc, handler_addr_prefetch
ldr pc, handler_addr_abort
/* Program signature checked by boot loader */
.word 0xb8a06f58
ldr pc, handler_addr_irq
ldr pc, handler_addr_fiq
handler_addr_reset:
#ifdef BSP_START_RESET_VECTOR
.word BSP_START_RESET_VECTOR
#else
.word _start
#endif
handler_addr_undef:
.word _ARMV4_Exception_undef_default
handler_addr_swi:
.word _ARMV4_Exception_swi_default
handler_addr_prefetch:
.word _ARMV4_Exception_pref_abort_default
handler_addr_abort:
.word _ARMV4_Exception_data_abort_default
handler_addr_reserved:
.word _ARMV4_Exception_reserved_default
handler_addr_irq:
.word _ARMV4_Exception_interrupt
handler_addr_fiq:
.word _ARMV4_Exception_fiq_default
bsp_start_vector_table_end:
#ifdef BSP_START_IN_HYP_SUPPORT
bsp_start_hyp_vector_table_begin:
ldr pc, handler_addr_hyp_reset
ldr pc, handler_addr_hyp_undef
ldr pc, handler_addr_hyp_swi
ldr pc, handler_addr_hyp_prefetch
ldr pc, handler_addr_hyp_abort
ldr pc, handler_addr_hyp_hyp
ldr pc, handler_addr_hyp_irq
ldr pc, handler_addr_hyp_fiq
handler_addr_hyp_reset:
.word _ARMV4_Exception_reserved_default
handler_addr_hyp_undef:
.word _ARMV4_Exception_reserved_default
handler_addr_hyp_swi:
.word _ARMV4_Exception_reserved_default
handler_addr_hyp_prefetch:
.word _ARMV4_Exception_reserved_default
handler_addr_hyp_abort:
.word _ARMV4_Exception_reserved_default
handler_addr_hyp_hyp:
.word _ARMV4_Exception_reserved_default
handler_addr_hyp_irq:
.word _ARMV4_Exception_reserved_default
handler_addr_hyp_fiq:
.word _ARMV4_Exception_reserved_default
bsp_start_hyp_vector_table_end:
#endif
/* Start entry */
_start:
/*
* We do not save the context since we do not return to the boot
* loader but preserve r1 and r2 to allow access to bootloader parameters
*/
#ifndef BSP_START_NEEDS_REGISTER_INITIALIZATION
mov r5, r1 /* machine type number or ~0 for DT boot */
mov r6, r2 /* physical address of ATAGs or DTB */
#else /* BSP_START_NEEDS_REGISTER_INITIALIZATION */
bl bsp_start_init_registers_core
#endif
#ifdef RTEMS_SMP
/* Read MPIDR and get current processor index */
mrc p15, 0, r0, c0, c0, 5
and r0, #0xff我们所关心的是最开始启动部分,也就是:
/* Start entry */
_start:
/*
* We do not save the context since we do not return to the boot
* loader but preserve r1 and r2 to allow access to bootloader parameters
*/
#ifndef BSP_START_NEEDS_REGISTER_INITIALIZATION
mov r5, r1 /* machine type number or ~0 for DT boot */
mov r6, r2 /* physical address of ATAGs or DTB */
#else /* BSP_START_NEEDS_REGISTER_INITIALIZATION */
bl bsp_start_init_registers_core
#endif
可以看出在这里,并没有关于fdt的任何信息,首先要对fdt的信息进行复制,也就是需要void bsp_fdt_copy(const void *src)函数支持,该函数位于bsp-fdt.c文件中,在/shared/src文件夹中,因此要在configure.ac文件中包含此文件,使其编译。
libbsp_a_SOURCES += ../../shared/src/bsp-fdt.c然后可以在start.S文件中添加该函数的运行,注意这里是汇编语言,bl代表跳转到此函数运行,运行完成跳转回来。因此加上:
bl bsp_fdt_copy
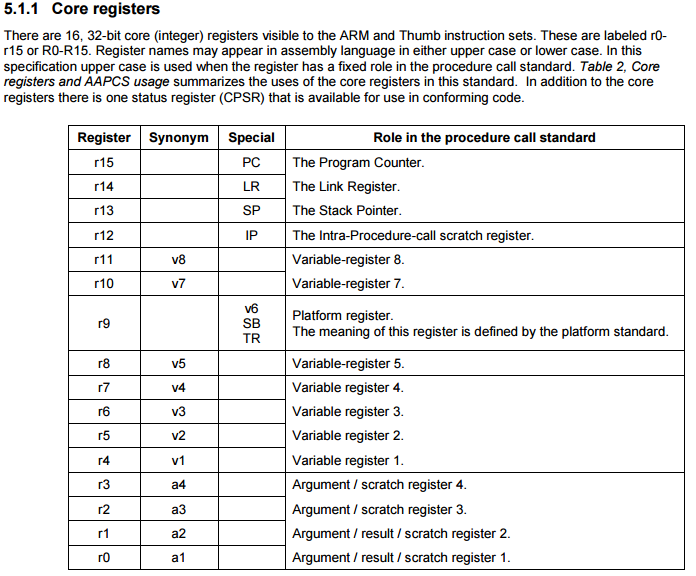
可以看出r0-r4都是传递argument的寄存器,因此r0应该是arm的第一个参数传递的寄存器,因此bsp_fdt_copy的参数应该是r0所传递的,回到start.S文件:
#ifndef BSP_START_NEEDS_REGISTER_INITIALIZATION
mov r5, r1 /* machine type number or ~0 for DT boot */
mov r6, r2 /* physical address of ATAGs or DTB */不难看出,寄存器r2是存储U-Boot传递过来的物理地址的,因此只需将r2的值传递给r0即可:
mov r0, r2
以上就完成了RTEMS的FDT支持 For BBB bsp。
除此之外,如何将dtb文件放入镜像文件中呢?这里需要修改beagle下simscripts文件夹下的sdcard.sh脚本文件,将:
$PREFIX/bin/mkimage -A arm -O rtems -T kernel -a 0x80000000 -e 0x80000000 -n RTEMS -d $TMPDIR/$base.bin.gz $TMPDIR/$app将这行中的rtems换成linux,这样才能实现FDT启动。
并且将dtb文件的启动地址写入uEnv,txt文件中,如下:
echo "setenv bootdelay 5
uenvcmd=run boot
boot=fatload mmc 0 0x80800000 $app ; fatload mmc 0 0x88000000 $app1 ; bootm 0x80800000 - 0x88000000" >$TMPDIR/$UENV
Done.















 880
880

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









