







Paper & Code:
- Parameter-Free Fast Pixelwise Non-Local Means Denoising 2014-11-19 · Jacques Froment
1. NLM的快速算法

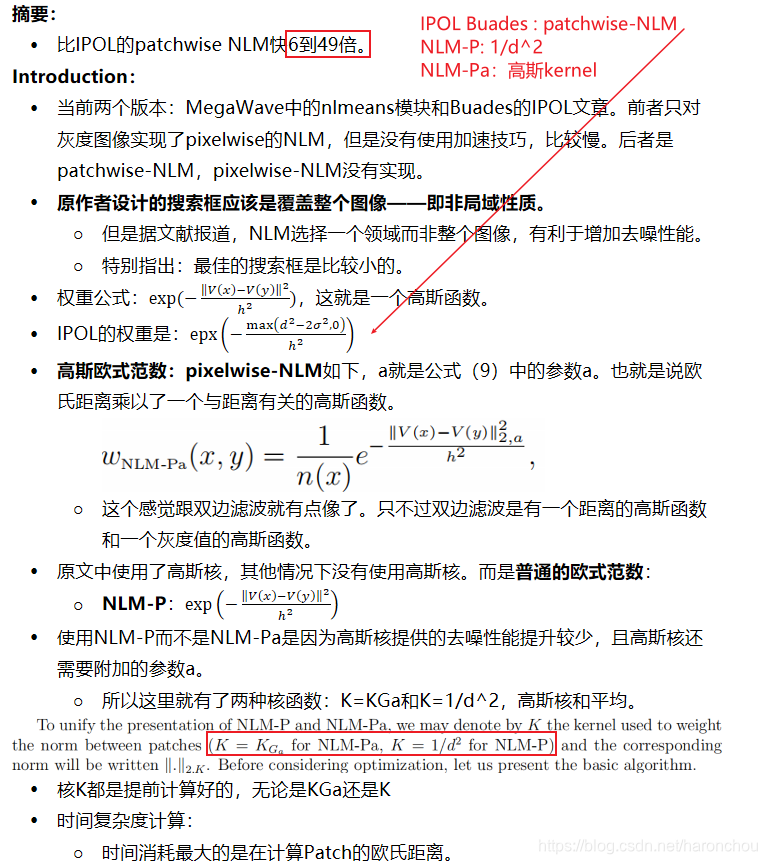
基本的pixelwise-NLM需要的时间复杂度为: ,N为256×256,Nc为通道数。D为搜索半径,d为patch的尺寸。
,N为256×256,Nc为通道数。D为搜索半径,d为patch的尺寸。
其时间开销为:
- 主循环:fist pass计算权重
 ,second pass计算聚合,需要
,second pass计算聚合,需要 。
。

- 并行计算:在主循环Level将特定像素x分配给特定线程。可以将执行时间在多个线程上平分。对于普通算法NLM和Fast NLM这个都可以实现的。
1.1 基于积分图的Fast NLM-P
- 降低求patch间欧氏距离的复杂度:积分图。
- 积分图的计算在常数时间内实现。算法2
- 先计算所有的积分图,需要D^2次移动,所以共需要
 操作。
操作。 - Fist Pass中计算patch之间的差,可以用公式计算。
- NLM的权重w计算与patch的大小无关。fast NLM-P的时间开销在主循环的初始化和Second Pass的开销。。
- 缺点:占用大量的内存,需要记录所有的St积分图,需要D^2*N个内存。
- 先计算所有的积分图,需要D^2次移动,所以共需要
- 积分图的计算在常数时间内实现。算法2
- 为了减小内存开销,改变循环的顺序,不需要t去索引积分图St,而是引入一个数组,储存归一化的权重和。内存为2*N。
- 但是,由于主循环中对估值进行了部分计算,虽然内存优化了,但是不适合并行处理。
- 积分图的缺点:
- 不允许使用Kernel来加权距离,如高斯核。
- 当图像尺寸过大,同时Patch的尺寸也较大时,积分图的一些值可能会很大,即使使用双精度类型,最终的计算结果的准确度会下降。
- 因此这种积分图很难用于实现NLM-Pa。
1.2 基于FFT的Fast NLM-Pa
- 提出FFT计算NLM-Pa的人,可以考虑任意形状的patch,应用范围更广。通过两个修改可以降低复杂度:
- (1)避免记录所有的积分图,重新计划循环方式,考虑偏移量。
- (2)给定t点的patch之间差的加权范数可以用离散卷积的方式来计算。
- 卷积的时间复杂度为:Nlog(N)。
-
主循环时间复杂度为O(NNcD2 log(NNc))。所以卷积计算是带有Kernel的NLM的附加开销部分。
1.3 使用不变线和(SIL)的Fast NLM-Pa
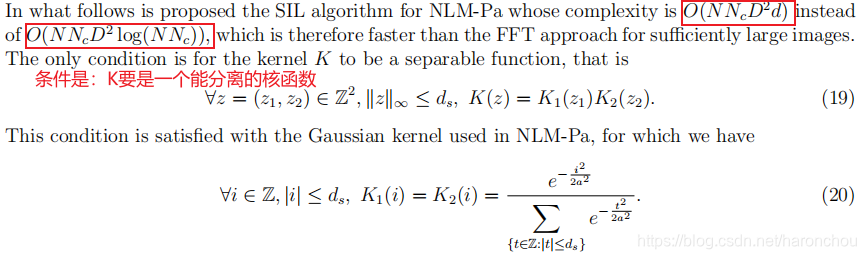
计算patch间的距离可以使用技巧:移动patch的一行或一列时不需要重新计算所有的像素差,而是保留差异。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









