






引言
随着物联网和人工智能的发展,嵌入式智能车成为了一个热门的研究领域。本文将深入介绍如何使用STM32F429微控制器设计和实现一款基础的智能车,包括硬件选型、电路设计、软件编程等关键环节,旨在为嵌入式系统爱好者和工程师提供一个全面的技术指南。
理论框架
嵌入式系统理论
-
微控制器(MCU)理论: STM32F429基于ARM Cortex-M4架构,拥有浮点运算单元(FPU),适用于复杂算法处理。其内部结构包括CPU、存储器、总线系统、中断控制器等。
-
外围接口理论: 包括通用I/O端口(GPIO)、定时器(TIM)、串行通信接口(UART、SPI、I2C)等,用于与外部设备交互。
-
实时操作系统(RTOS)理论: 可选用FreeRTOS等轻量级RTOS,实现任务调度和资源管理,提升系统的实时性和可靠性。
2. 电机控制理论
-
直流电机理论: 了解直流电机的工作原理,包括电磁感应定律、欧姆定律等,用于计算电机的电流、电压和扭矩。
-
PWM控制理论: 脉冲宽度调制(PWM)用于调整电机速度,通过改变脉冲的占空比来控制平均电压,从而调节电机转速。
-
PID控制理论: 比例积分微分控制算法用于实现闭环控制,提高电机的速度和位置控制精度。
3. 传感器技术理论
-
红外传感器理论: 基于红外光的发射与接收,用于检测障碍物,涉及光电效应和红外光谱学。
-
超声波传感器理论: 利用超声波的反射特性来测量距离,涉及声波传播原理和多普勒效应。
-
加速度计和陀螺仪理论: 用于姿态估计和导航,涉及牛顿运动定律和角动量守恒原理。
4. 无线通信理论
- 蓝牙通信协议: 了解蓝牙标准(如Bluetooth 4.0 BLE)的物理层、链路层和应用层协议,实现智能车的远程控制和数据传输。
设计原理
1. 系统架构设计
-
主控单元: STM32F429作为核心,负责接收传感器数据、处理算法和控制电机。
-
执行单元: 电机驱动电路,如L298N双H桥驱动,根据主控单元的指令控制电机动作。
-
感知单元: 传感器阵列,用于环境感知和数据采集。
-
通信单元: 蓝牙模块,实现与上位机或其他设备的无线通信。
2. 信号处理与算法设计
-
数据融合: 利用卡尔曼滤波等算法融合多种传感器数据,提高感知精度。
-
路径规划: 使用Dijkstra、A*等算法规划最优路径,实现自主导航。
-
避障算法: 结合红外和超声波传感器数据,实现障碍物检测和绕行策略。
3. 电源管理与能耗优化
-
电源系统设计: 选择合适的电池类型(如锂聚合物电池),设计充电电路和稳压电路,确保稳定供电。
-
能耗优化: 采用低功耗模式和动态电压频率调整(DVFS)等技术,延长智能车的续航时间。
硬件设计
1. 微控制器单元(MCU)
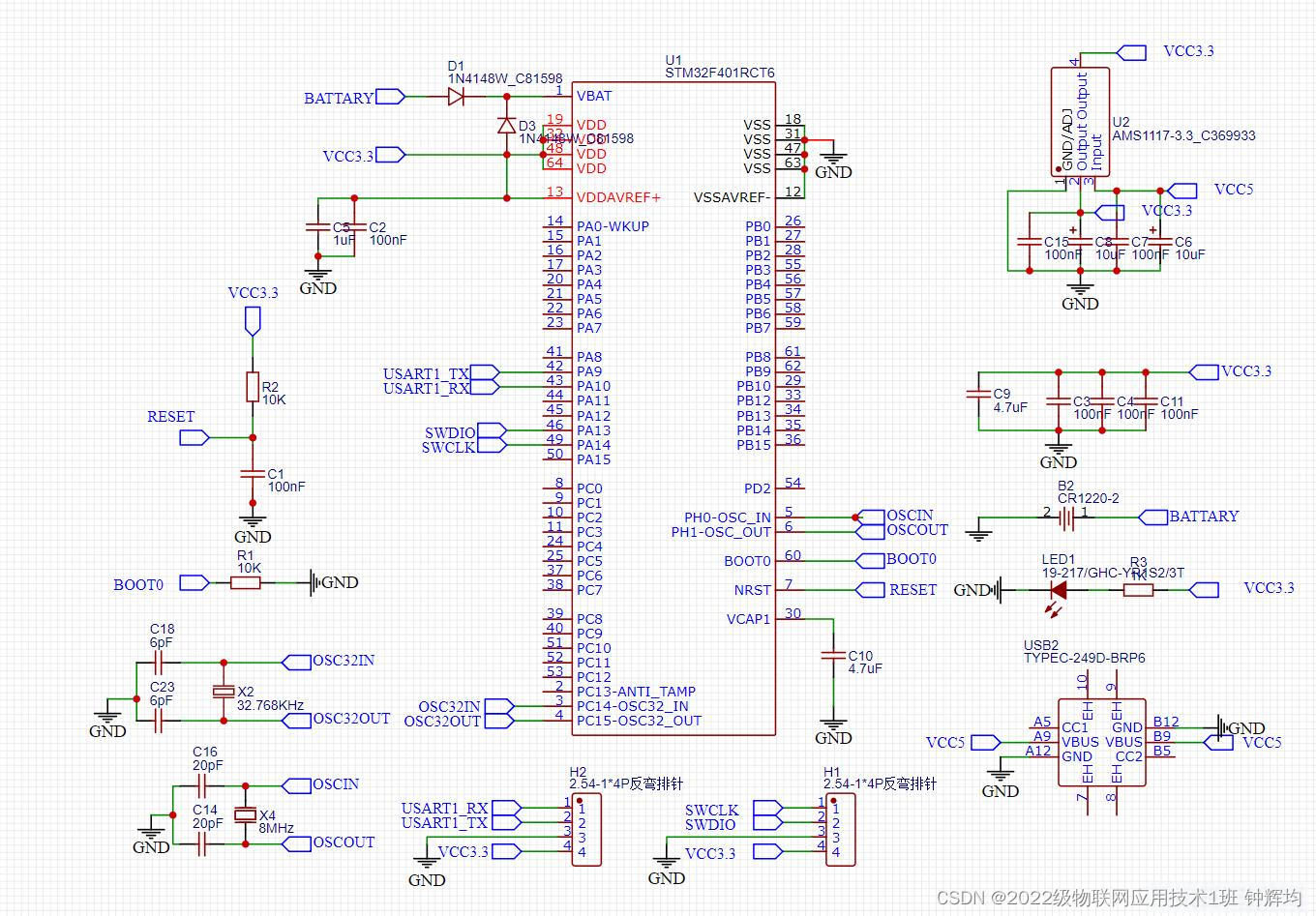
- STM32F429IGT6: 作为核心处理器,其具备高性能的Cortex-M4内核和丰富的外设资源,适合处理复杂的算法和实时控制任务。
- STM32F429IGT6原理图:
![]()
![]()
- STM32F429IGT6实物图:

2. 电机驱动模块
-
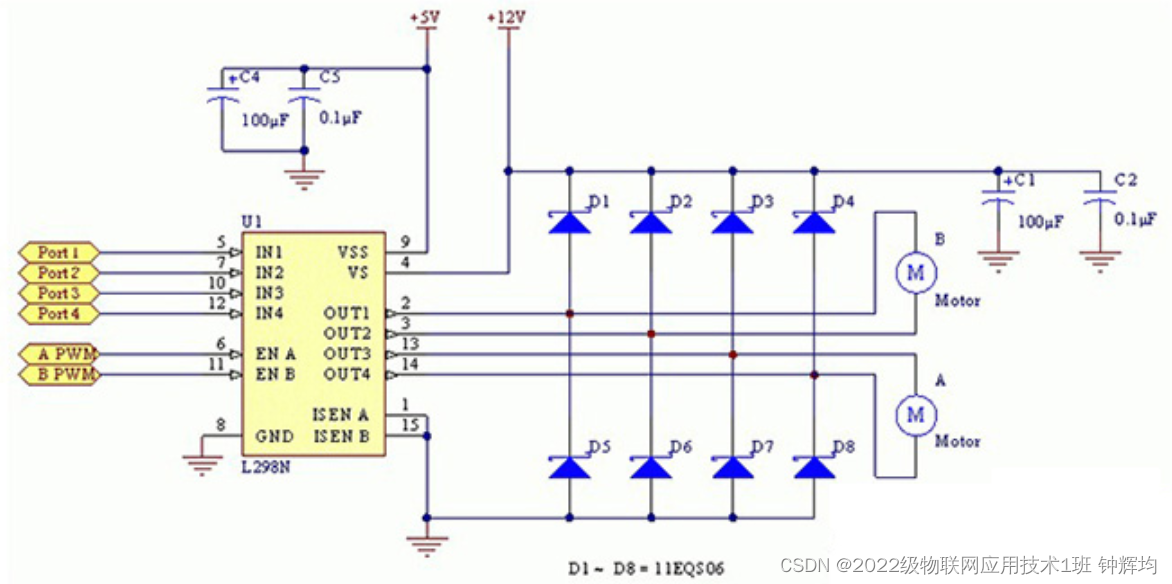
L298N: 双H桥驱动芯片,用于控制两个直流电机,实现智能车的前进、后退及转向。
-
L298N原理图:
-
L298N实物图:
-
电源管理: 采用可充电锂电池供电,通过电压调节模块确保稳定的5V输出给MCU和其他电子元件。
-
L298N控制两个直流电机代码示例:
#include "stm32f4xx_hal.h"
// 定义电机控制引脚
#define LEFT_MOTOR_DIR1 GPIO_PIN_0
#define LEFT_MOTOR_DIR2 GPIO_PIN_2
#define LEFT_MOTOR_PWM GPIO_PIN_1
#define RIGHT_MOTOR_DIR1 GPIO_PIN_0
#define RIGHT_MOTOR_DIR2 GPIO_PIN_2
#define RIGHT_MOTOR_PWM GPIO_PIN_1
// 电机控制PWM定时器
TIM_HandleTypeDef htim1;
// GPIO初始化结构体
GPIO_InitTypeDef GPIO_InitStruct = {0};
/**
* @brief 初始化HAL库和系统时钟
*/
void SystemClock_Config(void);
/**
* @brief 初始化GPIO引脚
*/
static void MX_GPIO_Init(void);
/**
* @brief 初始化定时器
*/
static void MX_TIM1_Init(void);
/**
* @brief 控制电机函数
*/
void moveForward(void);
void moveBackward(void);
void turnLeft(void);
void turnRight(void);
void stopMotors(void);
/**
* @brief 主函数
*/
int main(void)
{
HAL_Init(); // 初始化HAL库
SystemClock_Config(); // 配置系统时钟
MX_GPIO_Init(); // 初始化GPIO
MX_TIM1_Init(); // 初始化定时器
/* 用户代码开始 */
while (1)
{
moveForward(); // 示例:让智能车一直向前移动
}
/* 用户代码结束 */
}
/**
* @brief 电机控制函数实现
*/
void moveForward(void)
{
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR1 | RIGHT_MOTOR_DIR1, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR2 | RIGHT_MOTOR_DIR2, GPIO_PIN_RESET);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 500); // 设置PWM占空比
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, 500);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); // 开始PWM
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
}
void moveBackward(void)
{
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR1 | RIGHT_MOTOR_DIR1, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR2 | RIGHT_MOTOR_DIR2, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 500);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, 500);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
}
void turnLeft(void)
{
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR1, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, RIGHT_MOTOR_DIR1, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, RIGHT_MOTOR_DIR2, GPIO_PIN_RESET);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 500);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, 500);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
}
void turnRight(void)
{
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR1, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR2, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, RIGHT_MOTOR_DIR1, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, RIGHT_MOTOR_DIR2, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 500);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, 500);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
}
void stopMotors(void)
{
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_2);
}
/**
* @brief GPIO初始化
*/
static void MX_GPIO_Init(void)
{
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = LEFT_MOTOR_DIR1 | LEFT_MOTOR_DIR2 | LEFT_MOTOR_PWM |
RIGHT_MOTOR_DIR1 | RIGHT_MOTOR_DIR2 | RIGHT_MOTOR_PWM;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/**
* @brief TIM1定时器初始化
*/
static void MX_TIM1_Init(void)
{
__HAL_RCC_TIM1_CLK_ENABLE();
htim1.Instance = TIM1;
htim1.Init.Prescaler = 83; // 根据系统时钟调整
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 999;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&htim1);
}3. 传感器模块
-
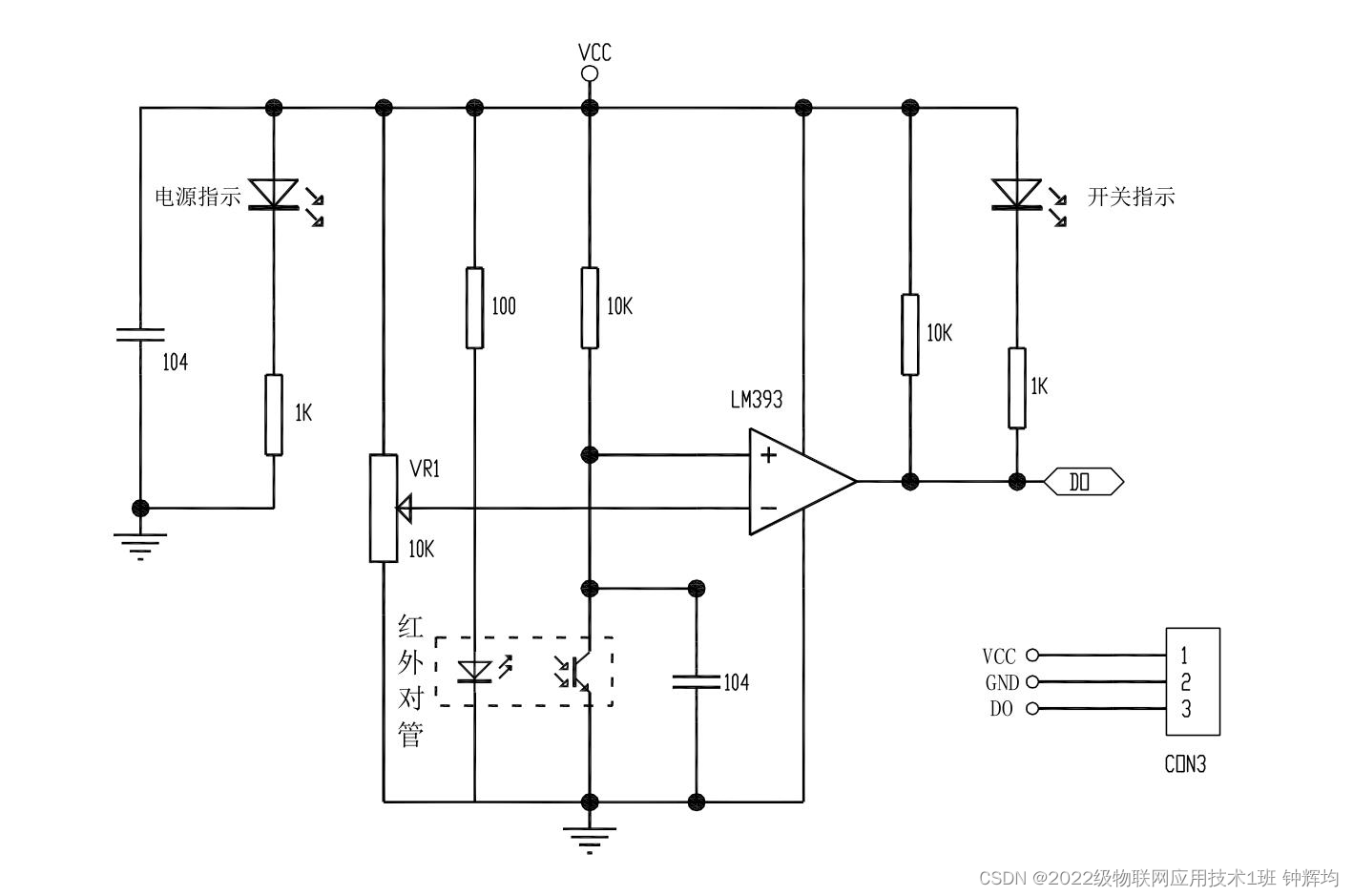
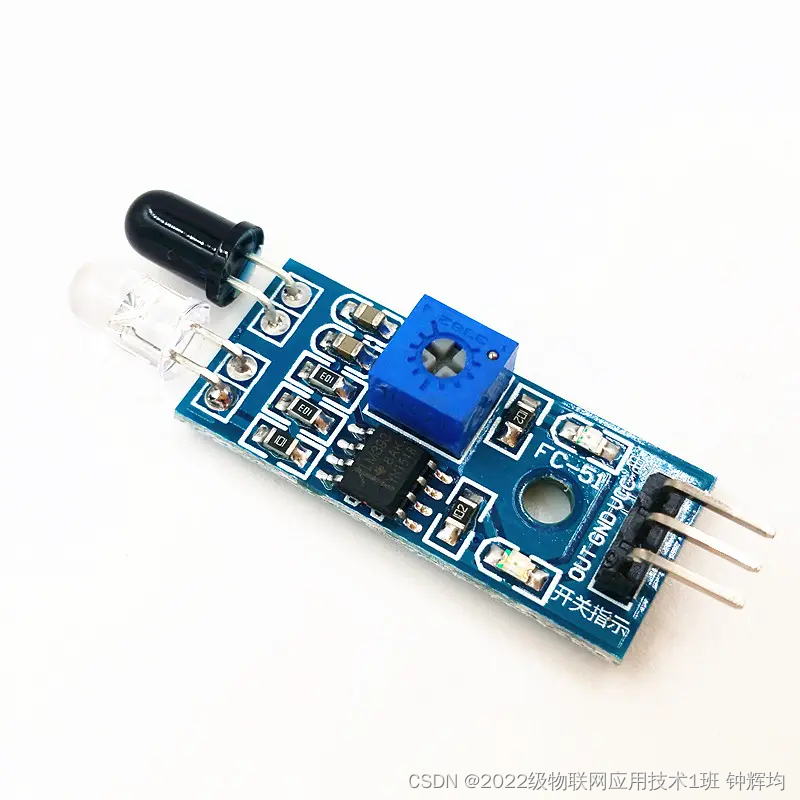
红外避障传感器: 用于检测前方障碍物,实现避障功能。
-
红外避障传感器原理图:
-
红外避障传感器实物图:
-
红外避障传感器代码示例:
#include "stm32f4xx_hal.h"
// 定义红外避障传感器引脚
#define OBSTACLE_SENSOR GPIO_PIN_0
// GPIO初始化结构体
GPIO_InitTypeDef GPIO_InitStruct = {0};
/**
* @brief 初始化HAL库和系统时钟
*/
void SystemClock_Config(void);
/**
* @brief 初始化GPIO引脚
*/
static void MX_GPIO_Init(void);
/**
* @brief 检测障碍物函数
*/
bool isObstacleDetected(void);
/**
* @brief 主函数
*/
int main(void)
{
HAL_Init(); // 初始化HAL库
SystemClock_Config(); // 配置系统时钟
MX_GPIO_Init(); // 初始化GPIO
/* 用户代码开始 */
while (1)
{
if (isObstacleDetected())
{
// 如果检测到障碍物,执行相应动作
// 例如:停止移动、绕行或发出警报
}
else
{
// 如果没有检测到障碍物,执行正常动作
// 例如:继续移动
}
}
/* 用户代码结束 */
}
/**
* @brief 检测障碍物函数实现
*/
bool isObstacleDetected(void)
{
if (HAL_GPIO_ReadPin(GPIOA, OBSTACLE_SENSOR) == GPIO_PIN_RESET)
{
// 如果引脚为低电平,则检测到障碍物
return true;
}
else
{
// 如果引脚为高电平,则没有检测到障碍物
return false;
}
}
/**
* @brief GPIO初始化
*/
static void MX_GPIO_Init(void)
{
__HAL_RCC_GPIOA_CLK_ENABLE(); // 使能GPIOA时钟
GPIO_InitStruct.Pin = OBSTACLE_SENSOR;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT; // 设置为输入模式
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用内部上拉或下拉
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}-
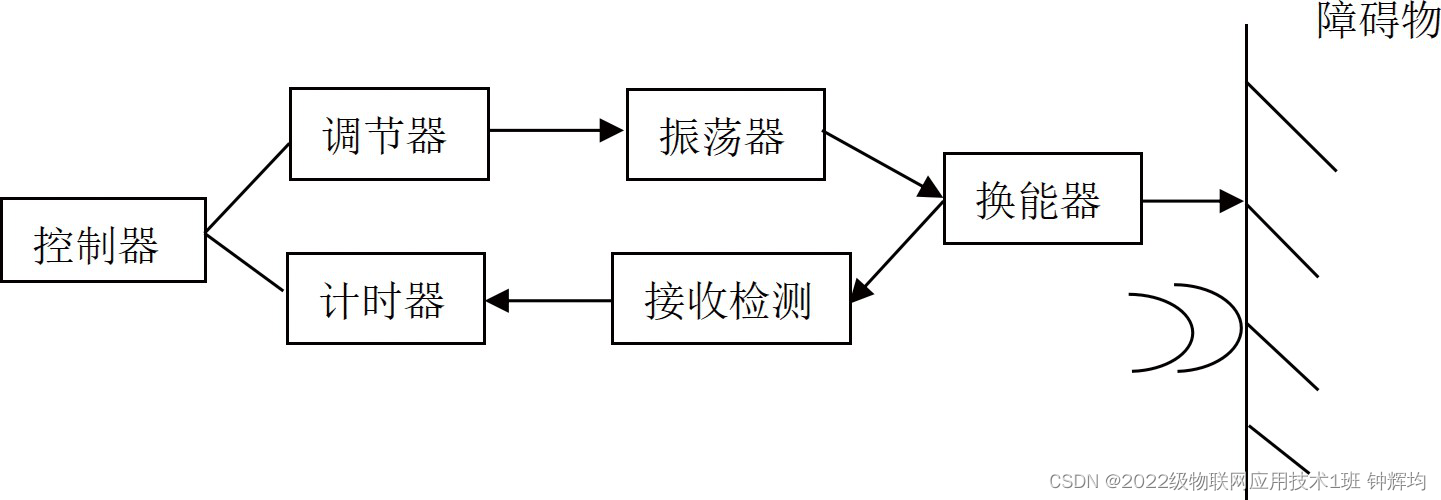
超声波传感器: 用于测量距离,辅助智能车在复杂环境中导航。
-
超声波传感器原理图:
-
超声波传感器实物图:

-
超声波传感器代码示例:
#include "stm32f4xx_hal.h"
// 定义超声波传感器的GPIO引脚
#define TRIGGER_PIN GPIO_PIN_0
#define ECHO_PIN GPIO_PIN_1
// 定义GPIO端口
#define TRIGGER_GPIO GPIOA
#define ECHO_GPIO GPIOB
// 用于存储测量距离的变量
float distance_cm;
// GPIO初始化结构体
GPIO_InitTypeDef GPIO_InitStruct = {0};
/**
* @brief 初始化HAL库和系统时钟
*/
void SystemClock_Config(void);
/**
* @brief 初始化GPIO引脚
*/
static void MX_GPIO_Init(void);
/**
* @brief 发送超声波脉冲
*/
void sendTriggerPulse(void);
/**
* @brief 计算距离
*/
void calculateDistance(void);
/**
* @brief 主函数
*/
int main(void)
{
HAL_Init(); // 初始化HAL库
SystemClock_Config(); // 配置系统时钟
MX_GPIO_Init(); // 初始化GPIO
/* 用户代码开始 */
while (1)
{
sendTriggerPulse(); // 发送触发脉冲
calculateDistance(); // 计算距离
HAL_Delay(500); // 等待0.5秒,避免频繁触发
}
/* 用户代码结束 */
}
/**
* @brief 发送超声波脉冲
*/
void sendTriggerPulse(void)
{
// 清除TRIGGER引脚
HAL_GPIO_WritePin(TRIGGER_GPIO, TRIGGER_PIN, GPIO_PIN_RESET);
HAL_Delay(2); // 等待2微秒
// 发送10微秒的高电平脉冲
HAL_GPIO_WritePin(TRIGGER_GPIO, TRIGGER_PIN, GPIO_PIN_SET);
HAL_Delay(10); // 等待10微秒
HAL_GPIO_WritePin(TRIGGER_GPIO, TRIGGER_PIN, GPIO_PIN_RESET);
}
/**
* @brief 计算距离
*/
void calculateDistance(void)
{
uint32_t start_time, end_time;
// 等待Echo引脚变为高电平
while (HAL_GPIO_ReadPin(ECHO_GPIO, ECHO_PIN) == GPIO_PIN_RESET);
// 记录高电平开始的时间
start_time = HAL_GetTick();
// 等待Echo引脚变为低电平
while (HAL_GPIO_ReadPin(ECHO_GPIO, ECHO_PIN) == GPIO_PIN_SET);
// 记录高电平结束的时间
end_time = HAL_GetTick();
// 计算往返时间并转换为距离(cm)
distance_cm = ((end_time - start_time) / 2) / 29.1f;
}
/**
* @brief GPIO初始化
*/
static void MX_GPIO_Init(void)
{
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = TRIGGER_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(TRIGGER_GPIO, &GPIO_InitStruct);
GPIO_InitStruct.Pin = ECHO_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(ECHO_GPIO, &GPIO_InitStruct);
}4. 通信模块
- 蓝牙模块: 实现智能车与外部设备(如手机或PC)的无线通信,便于远程控制和数据传输。、
- 蓝牙模块原理图:
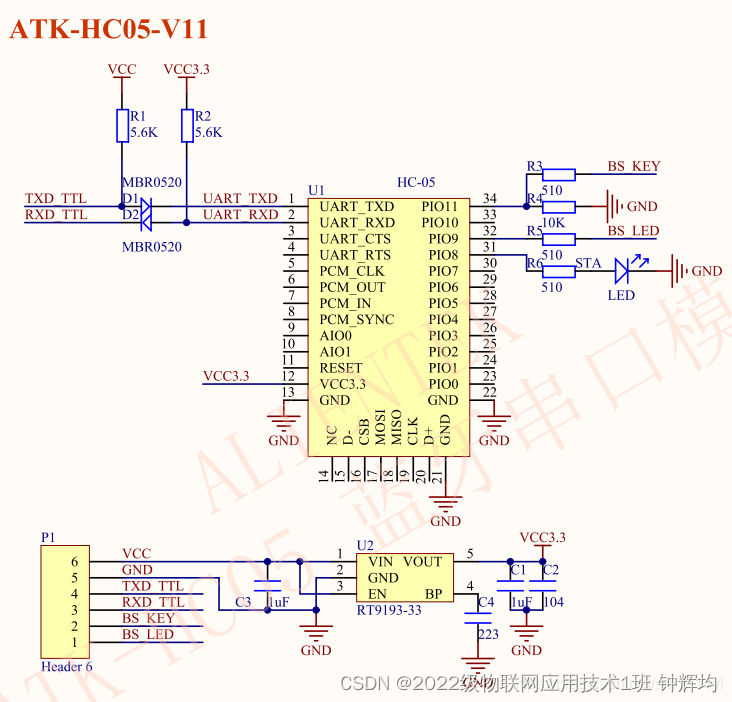
- 蓝牙模块实物图:

- 蓝牙模块代码示例:
#include "stm32f4xx_hal.h"
// UART配置
#define UART_TX_PIN GPIO_PIN_9
#define UART_TX_GPIO GPIOA
#define UART_RX_PIN GPIO_PIN_10
#define UART_RX_GPIO GPIOA
#define UART_PERIPH USART2
// UART初始化结构体
USART_InitTypeDef usart_init = {0};
// GPIO初始化结构体
GPIO_InitTypeDef gpio_init = {0};
// 主函数
int main(void)
{
HAL_Init(); // 初始化HAL库
SystemClock_Config(); // 配置系统时钟
// 配置USART TX引脚
__HAL_RCC_GPIOA_CLK_ENABLE();
gpio_init.Pin = UART_TX_PIN;
gpio_init.Mode = GPIO_MODE_AF_PP;
gpio_init.Pull = GPIO_NOPULL;
gpio_init.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
gpio_init.Alternate = GPIO_AF7_USART2;
HAL_GPIO_Init(UART_TX_GPIO, &gpio_init);
// 配置USART RX引脚
gpio_init.Pin = UART_RX_PIN;
gpio_init.Mode = GPIO_MODE_INPUT;
HAL_GPIO_Init(UART_RX_GPIO, &gpio_init);
// 配置USART
__HAL_RCC_USART2_CLK_ENABLE();
usart_init.BaudRate = 9600;
usart_init.WordLength = UART_WORDLENGTH_8B;
usart_init.StopBits = UART_STOPBITS_1;
usart_init.Parity = UART_PARITY_NONE;
usart_init.Mode = UART_MODE_TX_RX;
usart_init.HwFlowCtl = UART_HWCONTROL_NONE;
usart_init.OverSampling = UART_OVERSAMPLING_16;
HAL_UART_Init(UART_PERIPH);
// 用户代码开始
while (1)
{
// 发送数据
char data_to_send[] = "Hello from STM32 via Bluetooth!";
HAL_UART_Transmit(UART_PERIPH, (uint8_t*)data_to_send, strlen(data_to_send), HAL_MAX_DELAY);
// 接收数据
char received_data[256];
HAL_UART_Receive(UART_PERIPH, (uint8_t*)received_data, sizeof(received_data), HAL_MAX_DELAY);
// 如果需要处理接收到的数据,可以在这里添加代码
}
// 用户代码结束
}
// 系统时钟配置
void SystemClock_Config(void)
{
// 根据你的硬件配置进行时钟树配置
}
// UART中断服务程序(如果需要)
void USART2_IRQHandler(void)
{
HAL_UART_IRQHandler(UART_PERIPH);
}软件设计
软件设计主要包括STM32CubeMX项目配置、HAL库初始化代码生成、以及控制逻辑的编写。
1. STM32CubeMX项目配置
-
选择芯片: STM32F429IGT6。
-
配置GPIO:
- L298N的使能和方向控制引脚。
- 红外避障传感器和超声波传感器的输入引脚。
- 蓝牙模块的串行通信引脚。
-
生成代码: 选择IDE(如Keil uVision),并生成初始化代码。
2.主要部分代码如下
C
#include "stm32f4xx_hal.h"
#include "main.h"
// 定义电机控制引脚
#define LEFT_MOTOR_DIR GPIO_PIN_0
#define LEFT_MOTOR_PWM GPIO_PIN_1
#define RIGHT_MOTOR_DIR GPIO_PIN_2
#define RIGHT_MOTOR_PWM GPIO_PIN_3
// 定义红外避障传感器引脚
#define OBSTACLE_SENSOR GPIO_PIN_4
// 电机控制PWM定时器
TIM_HandleTypeDef htim1;
// GPIO初始化结构体
GPIO_InitTypeDef GPIO_InitStruct = {0};
/**
* @brief 初始化HAL库和系统时钟
*/
void SystemClock_Config(void);
/**
* @brief 初始化GPIO引脚
*/
static void MX_GPIO_Init(void);
/**
* @brief 初始化定时器
*/
static void MX_TIM1_Init(void);
/**
* @brief 电机控制函数
*/
void moveForward(void);
void moveBackward(void);
void turnLeft(void);
void turnRight(void);
void stopMotors(void);
/**
* @brief 检测障碍物
*/
bool isObstacleDetected(void);
/**
* @brief 主函数
*/
int main(void)
{
HAL_Init(); // 初始化HAL库
SystemClock_Config(); // 配置系统时钟
MX_GPIO_Init(); // 初始化GPIO
MX_TIM1_Init(); // 初始化定时器
/* 用户代码开始 */
while (1)
{
if (isObstacleDetected())
{
stopMotors();
HAL_Delay(1000); // 等待1秒
turnRight();
}
else
{
moveForward();
}
}
/* 用户代码结束 */
}
/**
* @brief 电机控制函数实现
*/
void moveForward(void)
{
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR | RIGHT_MOTOR_DIR, GPIO_PIN_RESET);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 500);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, 500);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
}
void moveBackward(void)
{
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR | RIGHT_MOTOR_DIR, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 500);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, 500);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
}
void turnLeft(void)
{
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, RIGHT_MOTOR_DIR, GPIO_PIN_RESET);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 500);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, 500);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
}
void turnRight(void)
{
HAL_GPIO_WritePin(GPIOA, LEFT_MOTOR_DIR, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, RIGHT_MOTOR_DIR, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 500);
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_2, 500);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
}
void stopMotors(void)
{
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_2);
}
/**
* @brief 障碍物检测函数
*/
bool isObstacleDetected(void)
{
return HAL_GPIO_ReadPin(GPIOA, OBSTACLE_SENSOR) == GPIO_PIN_SET;
}
/**
* @brief GPIO初始化
*/
static void MX_GPIO_Init(void)
{
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitStruct.Pin = LEFT_MOTOR_DIR | LEFT_MOTOR_PWM | RIGHT_MOTOR_DIR | RIGHT_MOTOR_PWM | OBSTACLE_SENSOR;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = OBSTACLE_SENSOR;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/**
* @brief TIM1定时器初始化
*/
static void MX_TIM1_Init(void)
{
__HAL_RCC_TIM1_CLK_ENABLE();
htim1.Instance = TIM1;
htim1.Init.Prescaler = 83; // 根据系统时钟调整
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 999;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&htim1);
}3. 控制逻辑解析
C
1#include "stm32f4xx_hal.h"
2
3// 定义GPIO和外设引脚
4#define LEFT_MOTOR_EN GPIOA
5#define LEFT_MOTOR_DIR GPIOB
6#define RIGHT_MOTOR_EN GPIOC
7#define RIGHT_MOTOR_DIR GPIOD
8#define OBSTACLE_GPIO GPIOE
9#define ULTRASONIC_GPIO GPIOF
10#define BT_RX GPIOG
11#define BT_TX GPIOH
12
13// 主函数
14int main(void)
15{
16 HAL_Init(); // 初始化HAL库
17 SystemClock_Config(); // 配置系统时钟
18 MX_GPIO_Init(); // 初始化GPIO
19 MX_USART1_UART_Init(); // 初始化串口(蓝牙)
20
21 while (1)
22 {
23 // 检测前方障碍物
24 if (HAL_GPIO_ReadPin(OBSTACLE_GPIO, GPIO_PIN_0) == GPIO_PIN_SET)
25 {
26 stopMotors(); // 避障时停止电机
27 delay(1000); // 短暂停留
28 turnRight(); // 右转避障
29 }
30
31 // 读取蓝牙指令
32 if (HAL_UART_Receive(&huart1, (uint8_t*)&cmd, 1, 10) == HAL_OK)
33 {
34 switch(cmd)
35 {
36 case 'F': moveForward(); break; // 前进
37 case 'B': moveBackward(); break; // 后退
38 case 'L': turnLeft(); break; // 左转
39 case 'R': turnRight(); break; // 右转
40 default: stopMotors(); // 停止
41 }
42 }
43 }
44}
45
46// 控制电机函数
47void moveForward()
48{
49 HAL_GPIO_WritePin(LEFT_MOTOR_DIR, GPIO_PIN_1, GPIO_PIN_SET);
50 HAL_GPIO_WritePin(RIGHT_MOTOR_DIR, GPIO_PIN_2, GPIO_PIN_SET);
51 HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); // 开始PWM
52 HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
53}
54
55// 其他控制函数类似...
56
57// GPIO初始化函数
58static void MX_GPIO_Init(void)
59{
60 // GPIO初始化代码...
61}-
HAL_GPIO_ReadPin(): 读取GPIO引脚状态,用于检测障碍物和接收蓝牙指令。
-
HAL_UART_Receive(): 从蓝牙模块接收指令,实现远程控制。
-
HAL_TIM_PWM_Start(): 通过定时器产生PWM信号,控制电机速度。
测试与调试
完成硬件组装和软件编程后,将智能车置于测试环境中进行调试。重点检查以下方面:
- 电机是否按指令正常运转。
- 避障和导航功能是否有效。
- 无线通信是否稳定。
使用示波器和逻辑分析仪可以辅助识别电路和信号传输的问题,确保智能车的各项功能正常运行。
结语
本文通过详细的硬件选型、电路设计和软件编程解析,全面介绍了基于STM32F429的嵌入式智能车设计与实现过程。通过实践本指南,读者可以掌握构建基础智能车的关键技术,为进一步研究和创新奠定坚实的基础。嵌入式智能车不仅是一项有趣的项目,也是学习嵌入式系统、电机控制和传感器技术的绝佳平台。希望本文能够激发更多人对嵌入式领域的兴趣和探索。















 363
363











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









