







曝光受快门速度和光圈大小的影响,通俗说法中的曝光时间跟快门速度是一样的,所以才会产生你这个疑问,但是正式的说法没有曝光时间这个说法,应该说是曝光量而不是曝光时间。 如果你一定要说曝光时间的话,就要抛开光圈的影响。你可以这样理解,当光圈相同的情况下,快门速度快则曝光时间短,快门速度慢,则曝光时间长。比如:光圈在F2.8的时候,千分之一秒的快门速度比百分之一秒的快门速度,所产生的曝光时间短。 下面说一下曝光量: 你也知道相机其实就是用底片(胶卷相机)或者CCD(数码相机)把光线的投影保存起来,所以在底片或者CCD上保存的光线的量影响相片的明暗,要是保存的光线很少就偏暗,如果保存的光线很多就偏亮。而这个光线的量不多不少就可以说曝光正常,偏多就是曝光过量,偏少就是欠曝。 而相机就是通过快门和光圈控制这个曝光的量。借用别人的比喻说说,这个照相机就像一个水龙头,水量的大小就相当于曝光量,你可以通过开关一定时间和调节水管的口径大小控制水量的大小,而这个水龙头的开关就相当于相机快门的速度,口径就相当于相机光圈。在你相同口径的时候,开的时间越长水量越大;在你开的时间相同的情况下,水管的口径越大水量就越大。 综上所述(-_-! 跟写论文一样),曝光量由快门速度和光圈大小同时决定。所以说仅说曝光时间不合适,应该说曝光量。
YUV和YCrCb差异
http://blog.csdn.net/suwenqiang_2011/article/details/8834121
最近在研究camera的驱动,经常会看到camera IC输出格式为RGB,YUV/YCrCb,我非常不明白的一个概念就是YUV和YCrCb到底有什么区别?或者说他们是否是同一个概念,只是别名不同而已,因此我在网上搜索了很久,终于得到了一个比较满意的答案。
原文地址:http://forum.eepw.com.cn/thread/84775/1
问题1:什么是YUV?问题2:YUV,YCbCr4 YUV (4:2:2)与YCbCr4:2:2格式是否是一会事?问题3:支持ITU601的YCbCr4:2:2格式与普通的YCbCr4:2:2格式有什么区别?答 1:详细介绍一下YUV(也称YCrCb)是被欧洲电视系统所采用的一种颜色编码方法(属于PAL制式)。YUV主要用于优化彩色视频信号的传输,使其向后兼容老式黑白电视。与RGB视频信号传输相比,它最大的优点在于只占用极少的带宽,而RGB要求三个独立的视频信号同时传输。
在YUV中,“Y”代表明亮度(Luminance或Luma),也就是灰阶值;而“U”和“V”表示的则是色度(Chrominance或Chroma),作用是描述影像色彩及饱和度,用于指定像素的颜色。“亮度”是通过RGB输入信号来创建的,方法是将RGB信号的特定部分叠加到一起。“色度”则定义了颜色的两个方面——色调与饱和度,分别用Cr和Cb来表示。其中,Cr反映了RGB输入信号红色部分与RGB信号亮度值之间的差异,而Cb反映的是RGB输入信号蓝色部分与RGB信号亮度值之间的差异,此即所谓的色差信号,也就是我们常说的分量信号(Y、R-Y、B-Y)。
在专业领域了,“Y CB CR”表示数字色差信号而不是模拟色差信号。色差信号Y,R-Y,B-Y信号一般通称为Y, Cr,Cb; 习惯上Y,Cr,Cb为数字(PCM)的色差信号,模拟的色差信号则称Y,Pr,Pb,所以我们常在DVD Player的内部看到Y,Cr,Cb而在DVD Player的外部看到色差输出标示为Y,Pr,Pb或YUV;YUV则是在欧洲电视系统PAL中的色差信号的通称,包含数字及模拟的色差信号都称YUV,所以当您看到YUV时您就要联想到它是PAL系统中的Y,R-Y,B-Y信号,它可能是数字(PCM)的YUV,也可能是模拟的YUV。答 2:也就是说是模拟和数字的区别了在习惯上有所区别:
“习惯上Y,Cr,Cb为数字(PCM)的色差信号,模拟的色差信号则称Y,Pr,Pb,所以我们常在DVD Player的内部看到Y,Cr,Cb而在DVD Player的外部看到色差输出标示为Y,Pr,Pb或YUV;”
实际上可能一样:
“YUV则是在欧洲电视系统PAL中的色差信号的通称,包含数字及模拟的色差信号都称YUV,所以当您看到YUV时您就要联想到它是PAL系统中的Y,R-Y,B-Y信号,它可能是数字(PCM)的YUV,也可能是模拟的YUV。”答 3:YUV 和 Y,Cr,Cb对于数字电路而言:YUV 和 Y,Cr,Cb只是相差128,YUV没有负值,Y,Cr,Cb最高位为符号位,U = Cr + 128;V = Cb +128. 参见iru bt656 or ccir 656Bayer数据的处理
原文地址:http://www.cnblogs.com/lin1270/archive/2010/12/01/1893647.html
Bayer是相机内部的原始图片, 一般后缀名为.raw. 很多软件都可以查看, 比如PS.
我们相机拍照下来存储在存储卡上的.jpeg或其它格式的图片, 都是从.raw格式转化
过来的. .raw格式内部的存储方式有多种, 但不管如何, 都是前两行的排列不同. 其
格式可能如下:
G R G R G R G R
B G B G B G B G
G R G R G R G R
B G B G B G B G
横为2的倍数, 竖为4的倍数, 它们构成了分辨率. 如, 上面则代表了 8 * 4 分辨率的
Bayer图.
我们要知道的是, G = 2 * R 及 G = 2 * B, 即绿色值为红色值或蓝色值的两倍, 因
为人眼对绿色更敏感, 所以绿色的分量更重.
下面说一下从bayer转换成rgb图的算法, RGB图, 即为三色图, 一个像素点就由RGB
三种颜色构成的混合色, 而bayer图一个像素就只有一个颜色, 或R或G或B. 因为bayer
一个像素点只有一种颜色, 需要借助这个像素点周围的颜色对它进行插值(填充)另外的
两种颜色, 它本身的颜色就不用插了. 一般的算法是:
对于插入R和B,
Rx = ( R1 + R2 ) / 2; 或-------------取上边和下边的平均值, 或是左边和右边的平均值
Rx = ( R1 + R2 + R3 + R4 ) / 4;----取四个边的平均值
B同理. 如:
G B G
R G R
G B G
对于中间的G, 它缺少 R和B, 用上下和左右的平均值进行求值.
对于
B G B
G R G
B G B
这个图呢, 中间点R, 缺少G和B, G暂时没讨论, 那么 B, 就是从R的四个B角进行求平均值.
==============================================
如果插入G, 稍有些复杂.
不过一般的算法与R和B一样, 复杂的算法, 其复杂程度也提升一倍, 不过精度更高, 如果对于
视频监测系统来说, 精度相对来说不必要求太高, 用R或B的解法即可. 下面说复杂的:
对于图:
R1
G1
R4 G4 R G2 R2
G3
R3
对于中间点R, 它需要插入G和B, B不讨论, 主要讨论G, 它周围有四个点G1, G2, G3, G4.
( G1 + G3 ) / 2--------------如果 |R1-R3| < |R2-R4|
G(R) = ( G2 + G4 ) / 2-------------如果 |R1-R3| > |R2-R4|
( G1 + G2 + G3 + G4 ) / 4--如果 |R1-R3| = |R2-R4|
如果周围出现的像素点颜色为B, 就应该比较|B1-B3|与|B2-B4|的值.
====================================================
还有关于将RGB格式转换为YUV格式的算法, 这里不想讨论了.
这里要注意的是, bayer每个像素的值是8位的. 但是有的相机的bayer格式却有10位, 12位
以及14位, 16位的, 那么如何将这些高于8位的数据转换为8位数据呢?. 拿12位数据来说, 有的
人是取高8位或是低8位, 那么这样就会出现一个问题, 这张图像会有一个斜度, 不是偏亮就是偏
暗, 或是出现其它乱七八糟的问题, 颜色问题总是不能令人满意. 这个时候就要去较正它, 无疑是
浪费了时间.
另一种算法是使用log映射, 据老外说, 这种转换法具有较高的精度. 拿12位来说, 一般转换算法:
f(in) = 2 ^ ( log(in) * 8 / 12 )
转换图为:
|8 .
| .
| .
|_______________________12
因为log256 = 8, log4096 = 12, 对了log是以2为底哦.
做得更好一点的算法, 可能根据提供的曝光等其它因素不同, 而将算法进行调整, 这样当一些意外
事件发生时, 产生的图片也不会失真严重.
如有何疑问, 请致信: 414078791@qq.com
camera isp
原文地址:http://blog.csdn.net/shenbin1430/article/details/6065444
1. 目标[52RD.com] 手机摄像头模组用ISP功能模块的市场走向及研发方向。为能够正确认识手机摄像模组行业提供技术及市场依据。[52RD.com] 2. ISP在模组上的应用原理[52RD.com] 2.1 功能区域[52RD.com] 无论数码相机、摄像机或者摄像手机,其影像数据从前端感应后,皆须经过ASP(Analog Signal Processing)、ADC(Analog-Digital Converter)、前期影像处理(Pre-ISP)与后端影像处理(Post-ISP)四个阶段后,影像数据才能最终呈现于终端设备上(图一)。
但由于图像传感器的像素高低不同、及其他成本等的考虑,ISP各功能区域会依手机市场特性做分散配置或整合处理,例如,低端相机将Pre-ISP与传感器整合在一起,2.0M像素手机将所有的ISP功能单独做成一个芯片等。 [52RD.com] 2.1.1 ASP [52RD.com] ASP(Analog Signal Processor)主要是针对图像传感器采集的电压或电流信号进行处理,主要作用是信号放大、自动曝光调整、时序控制、像素抽样控制等。因其与初始信号 的绝对相关性,一般的图像传感器厂商皆会将此项功能直接与传感器做在一块。在图一中即为蓝色部分。传感数据经过ASP处理后,输出数据为Raw Data。 [52RD.com] 2.1.2 Pre-ISP [52RD.com] Pre-ISP(Image Signal Processor)为前端影像处理,主要针对ADC转换后传出的数字数据(Raw data),进行影像坏点修补、白平衡、gamma校正、锐利度、颜色插值等。在低像素的产品中,例如0.3M像素,因影像数据较少,不需要大规模的复杂 处理,会将Pre-ISP与图像传感器做在同一颗芯片中;但高像素CMOS传感器,因需要处理的像素数越来越多,虽然将Pre-ISP集成在sensor 内部从制造技术上来讲不困难,但因成本及成像质量的原因,有些手机设计公司在设计时会将集成于sensor内部的Pre-ISP功能屏蔽掉,并维持传感器 ADC输出的原始资料,交由单独的ISP芯片或集成在Baseband的ISP进行处理。 [52RD.com] 由Pre-ISP处理完后的数据分为RGB和YUV,RGB为三原色,数据比YUV较大,可以方便后续处理单元(Post-ISP)做更为多元的变化;YUV为RGB三原色经内插法所得,数据量较小,但不利于后续的处理单元进行处理。 [52RD.com] 对于实力强的手机研发公司比较倾向于使用Raw data数据或者RGB数据,这样可以根据自己的需要调整出更完美的画面质量。Raw data数据也为以后高端市场的使用方向,但国内现阶段2.0M像素的模组应用还处于初级阶段。因此还是以YUV输出的为主。 [52RD.com] 2.1.3 Post-ISP [52RD.com] Post-ISP虽然也称为后端影响处理,但其与成像相关的工作不多,主要负责数据压缩与后端接口界面控制,以及数据传输、控制等工作,其中还包括LCD影像预览、镜头对焦控制、使用界面等。[52RD.com] 2.2 ISP发展阶段 [52RD.com] 2.2.1 第一阶段 [52RD.com] 第一阶段因像素不高(CIF等级),因此其结构与一般手机相差不多, Pre-ISP功能与图像传感器整合,而Post-ISP则依赖手机基带芯片,显示屏则经由系统提供,其结构如下 [52RD.com] [52RD.com] 图二 手机摄像模组后端芯片第一阶段原理图 [52RD.com] 2.2.2 第二阶段 [52RD.com] 随着像素增加(CIF至VGA),为维持后端手机基带芯片的通讯功能,开始将原来负责的JPEG压缩、数据流的协调处理等功能独立成单一芯片完成,而影像处理Pre-ISP则交由手机设计公司自行决定,分集成到图像传感器内部和与Post-ISP整合两种。 [52RD.com] 此阶段方案已被淘汰,VGA像素的Post-ISP功能已可被Baseband集成。
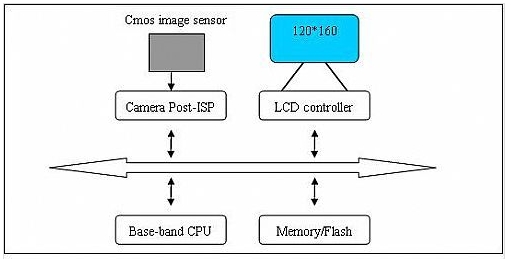
图三 手机摄像模组后端芯片第二阶段原理图[52RD.com] 2.2.3 第三阶段[52RD.com] 此时像素已由VGA转为百万像素,高像素的Pre-ISP,因所需的存储器及电源需求过大,在当时的技术条件下,sensor端已无法全部处理,因此将 Pre-ISP与Post-ISP整合成完整的ISP。另因为对显示屏幕的处理要求更高,此阶段也将显示器控制功能一并整合,以减少baseband的处 理负担,其结构见图四。
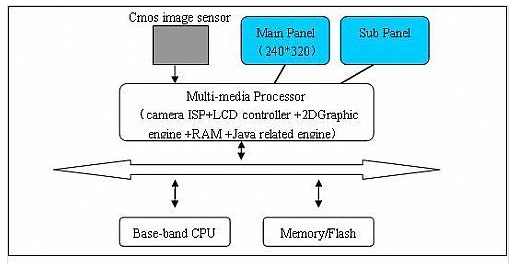
图四手机摄像模组后端芯片第三阶段原理图 [52RD.com] 2.2.4 第四阶段 [52RD.com] Main Panel [52RD.com] (240*320) [52RD.com] [52RD.com] 随像素增加到2.0M及以上,厂商将更多的功能例如MP3、3D sound processor、audio processor等亦集成进单独的ISP芯片,此时称之为MMP(Mobile Multimedia Processor),
图五手机摄像模组后端芯片第四阶段原理图 [52RD.com] 表一 手机摄像模组后端芯片发展趋势 [52RD.com] 阶段搭配像素趋势项目 [52RD.com] 第一阶段CIFl 结构与一般手机相差无异 [52RD.com] l Pre-ISP功能可与图像传感器整合 [52RD.com] l Post-ISP依靠手机基带芯片 [52RD.com] 第二阶段VGAl Post-ISP独立成单一芯片 [52RD.com] l Pre-ISP或由sensor集成或与Post-ISP整合 [52RD.com] 第三阶段Megal 图像传感器无法全部处理Pre-ISP,与Post-ISP整合成单独的ISP芯片 [52RD.com] 第四阶段2Mega及以上l 单独的MMP(ISP)芯片集成更多的功能,以迎合2.5G及3G的发展[52RD.com] [52RD.com] 3. 现阶段ISP的主要应用方案 [52RD.com] 表二 现阶段ISP的主要应用方案 [52RD.com] 像素输出格式ISP或手机设计方案备注 [52RD.com] VGAYUV/RGB/ [52RD.com] Raw datal Sensor集成Pre-ISP; [52RD.com] l Baseband集成Post-ISP。OV是VGA的首选sensor厂家,其主流产品:OV7660/OV7663/OV7670皆集成Pre-ISP,而MTK则将Post-ISP部分集成进Baseband。 [52RD.com] l Baseband未集成Post-ISP; [52RD.com] l ISP(Pre-ISP&Post-ISP)功能被集成于MMP中;有一定比例的Baseband厂商(例如英飞凌)未将Post-ISP集成进Baseband。而是采用MMP的方式来处理。 [52RD.com] 2.0Mega及以上YUV/RGBl Sensor中集成Pre-ISP; [52RD.com] l ISP(Pre- ISP&Post-ISP)功能被集成于MMP中。Baseband不参与图像处理手机设计公司可以采用sensor输出的YUV或RGB,或者 直接将Pre-ISP屏蔽掉,所有图像处理工作由MMP芯片来做。(理论上来讲,MMP处理效果应该好一点,实际上有时因调试工程师水平的原因,无法完全 发挥MMP的潜力。) [52RD.com] Raw datal Sensor中不集成Pre-ISP; [52RD.com] l ISP(Pre-ISP & Post-ISP)功能被集成于MMP中。Baseband不参与图像处理所有图像处理工作由MMP芯片来做。 [52RD.com] [52RD.com] 将来的趋势,因成本的原因,基带芯片会集成所有的图像处理功能。 [52RD.com] 4. 评价 [52RD.com] l 从 成本来讲,ISP与Sensor之间的关系是背离集成的。将ISP集成在sensor上的成本比ISP集成在MMP或baseband上要高很多。随着传 感器分辨率的提高,越来越多的传感器将只整合输出数字信号所必需的电路,而将图像处理及压缩等功能集成于MMP或Baseband中。[52RD.com] l 从成像质量来看,发展的趋势也是背离集成,在MMP中集成功能强大的图像处理功能,而且此趋势随分辨率的提高会愈加明显。[52RD.com] l 上面两个评价是发展趋势,但现在的市场情况各种应用方案都存在,且没有明显的强弱之分。MTK SoC方案在低端VGA产品中占主导,并且有大批的拥护者,但现仍有大批平台公司仍然没有走基带集成之路。且高端产品中,从我的了解中还没有将ISP功能 集成进Baseband中的,大部分仍然采用MMP方案。但有资料表明,将ISP功能集成进Baseband中制造成本几乎可以忽略不计,此方案较之 MMP方案仍然有成本空间。基带产品和应用处理器领域的大玩家都期待在它们的芯片上增加ISP功能。[52RD.com] l 无论如何,不管是当前的低端市场情况,还是将来的高端产品,独立的ISP(MMP)芯片都有较大的市场空间。真正的高像素SoC基带方案的时代到来还有很长的路要走。


RGB与Raw RGB有什么区别?
原文地址:http://www.cnblogs.com/crazybingo/archive/2012/03/22/2412498.html
摄像头的数据输出格式一般分为CCIR601、CCIR656、RAW RGB等格式,此处说的RGB格式应该就是CCIR601或CCIR656格式。而RAW RGB格式与一般的RGB格式是有区别的。
我们知道,Sensor的感光原理是通过一个一个的感光点对光进行采样和量化,但,在Sensor中,每一个感光点只能感光RGB中的一种颜色。所以,通常所说的30万像素或130万像素等,指的是有30万或130万个感光点。每一个感光点只能感光一种颜色。
但是,要还原一个真正图像,需要每一个点都有RGB三种颜色,所以,对于CCIR601或656的格式,在Sensor模组的内部会有一个ISP模块,会将Sensor采集到的数据进行插值和特效处理,例如:如果一个感光点感应的颜色是R,那么,ISP模块就会根据这个感光点周围的G、B感光点的数值来计算出此点的G、B值,那么,这一点的RGB值就被还原了,然后在编码成601或656的格式传送给Host。 而RAW RGB格式的Sensor则是将没个感光点感应到的RGB数值直接传送给Host,由Host来进行插值和特效处理。
修正:
不对吧,我觉得还是根据周围GB点的感应值,来推算出此位置的GB值。可能sensor可以支持例如算法来修正R值:根据周围R值来综合得出此点的R值。得出此位置像素的RGB数值。
Raw RGB 每个像素只有一种颜色(R、G、B中的一种); RGB 每个像素都有三种颜色,每一个的值在0~255之间; 在手机摄像头的测试过程中,由sensor输出的数据就是Raw data(Raw RGB),经过彩色插值就变成RGB
也不一定就是测试过程,想要获得真正的图像,都必须有的一个过程; sensor输出的数据格式,主要分两种:YUV(比较流行),RGB,这就是sonsor的数据输出;这其中的GRB就是Raw RGB,是sensor的bayer阵列获取的数据(每种传感器获得对应的颜色亮度); 但是输出的数据不等于就是图像的实际数据,模组测试时,就要写一个软件,完成数据采集(获得Raw data)->彩色插值(目的是获得RGB格式,便于图像显示)->图像显示; 这样就可以发现整个模组是否正常,有无坏点,脏点的等,检测出不良品;(软件的处理过程当中,为了获得更好的图像质量,还需要白平衡,gamma校正,彩色校正) 而在手机的应用中,手机根据相机模组的数据格式,提供一个ISP(主要用于RGB格式的),配合软件,使照相功能得到应用;
camer 知识锦集
http://blog.csdn.net/shunzi610747304/article/details/7788241
1:camera 快门
什么是快门:相机镜头前阻挡光线进入的装置,它是相机上控制感光片有效曝光时间的一种装置。
主要有两种类型: 1. 镜间快门(叶片快门) 2. 焦平面快门
快门时滞时间
相机在不使用对焦锁定功能同时保证在自动对焦工作状态下,从按下快门释放按钮到开始曝光的这段时间称为快门时滞时间。
快门先决曝光模式
由我们先自行决定快门速度后,相机测光系统依当时光线的情形,自动选择适当的光圈f值(可为无段式的f值)以配合。设有曝光模式转盘的数码相机,通常都会在转盘上刻上’s’字母来代表快门先决模式。快门先决模式适合于需要控制快门的摄影。利用高速快门可凝结动作,利用慢速快门可令行驶中的车辆变成光束。
快门延迟
相机按下快门,这时相机自动对焦、测光、计算曝光量、选择合适曝光组合…进行数据计算和存储处理所需要的时间称为快门延迟。
camera 快门用英语为(shutter)
曝光即是按下快门时相机感光元件受到光线的照射产生物理化学反应并以此记录光线信息的过程。要正确曝光,先得测光,现在数码相机都是自动测光系统,所以你不用担心曝光不准确。在打开相机,进入拍摄界面时,相机就已经开始自动测光了。完全手动设置曝光的是M档,你现在可以先不用它。还有有半自动档:只设置光圈与快门速度其中一个,相机会根据机内的测光系统自动给出另一个适当的值。另外就是AUTO全自动档,根据机内系统的测光结果,完全由相机自主决定所有参数的设置。另外“曝光补偿”这个功能可以用于调节入光量,相当于微调。往“+”调节即增加入光量,照片比正常稍亮,反之则降低入光量,照片稍暗。以肉眼观察,照片过暗或过亮,丧失需要拍摄的细节,就称欠曝和过曝,现在也有相关软件可以自动检测照片中的过曝与欠曝区域。
数码相机的影像传感器是不可更换的,为了得到不同的感光度,它需要在信号的A/D转换时变换信号增益(Gain)。如果光线暗,就需要提高感光度即加大增益,这会降低信噪比,也就是增大了噪点。















 3771
3771

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









