







最近很火的具身智能,而具身就需要用到许多的硬件,其中包括减速器,那么来具体了解一下减速器:
1、功能
降低转速:将输入轴的高转速转换为输出轴的低转速。
增加扭矩:在降低转速的同时,提升输出轴的扭矩。
可以理解为能量的形式进行了转换。
2、类型
-
齿轮减速器
行星齿轮减速器:结构紧凑、传动效率高,常用于机器人、航空航天、自动化设备。
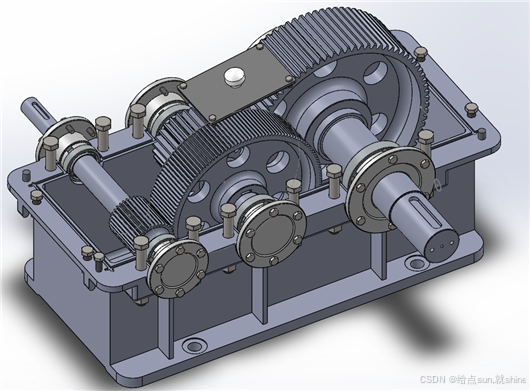
斜齿轮减速器:噪音小、承载能力强,广泛用于工业机械和重型设备。
直齿轮减速器:结构简单,但噪音大,多用于低速轻载设备。
-
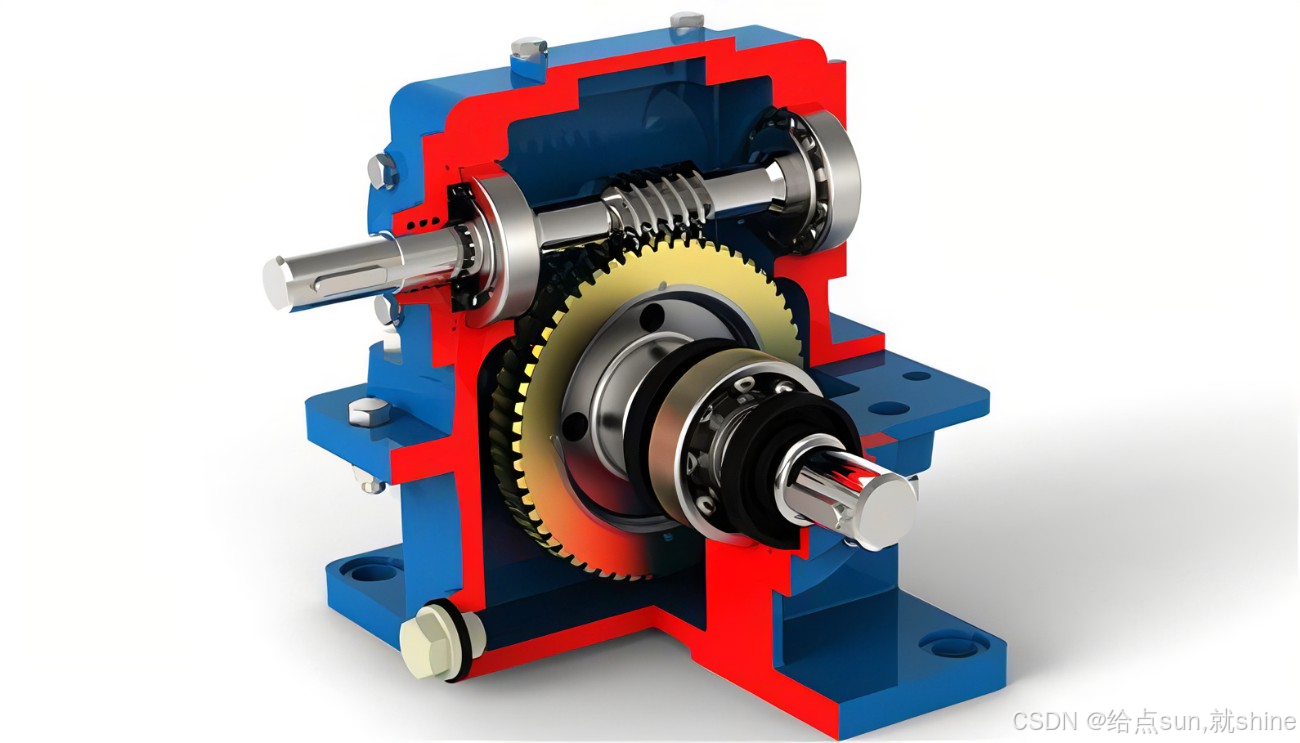
蜗轮蜗杆减速器
具有较大的减速比和自锁功能(可防止反转),多用于起重设备、输送机械等。
-
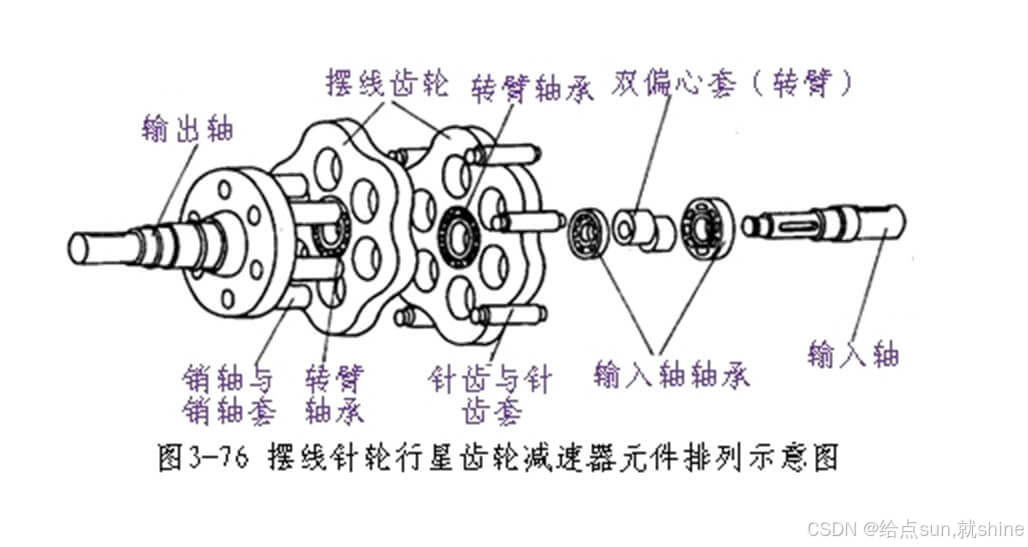
摆线针轮减速器
结构紧凑、传动平稳、耐冲击,广泛用于冶金、矿山、石油等行业。
-
谐波减速器
主要用于机器人、精密仪器等领域,具有高精度、零回差的特点。 -
RV减速器
主要用于工业机器人,精度高、承载能力强、体积小。
3、谐波减速器原理
因为用于机器人的主要有谐波和RV,因此重点讲一下他的原理。
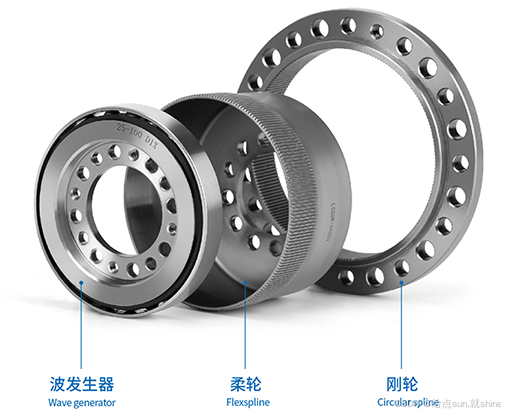
谐波减速器主要由三个核心部件组成:
刚轮(Circular Spline):是一个内齿轮,齿数比柔轮多2个,一般固定不动。
柔轮(Flexspline):是一个薄壁杯状齿轮,齿数比刚轮少2个,能够发生弹性变形。
波发生器(Wave Generator):由一个椭圆形凸轮和一个柔性轴承组成,装在柔轮内部,能使柔轮产生周期性变形。
减速原理:波发生器旋转时,柔轮不断变形,其啮合点沿着周向移动,形成相对运动。由于柔轮比刚轮少2个齿,每旋转一
圈,柔轮相对刚轮的运动量等于少掉的齿数,从而形成减速。
4、RV(Rotary Vector Reducer)减速器原理
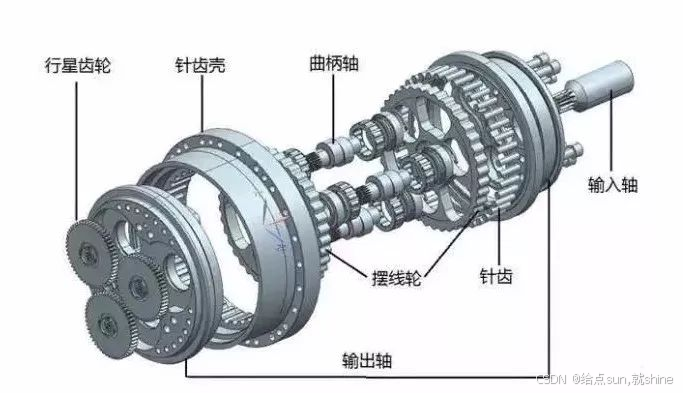
RV减速器的减速过程主要分为两级传动:
🔹 第一级:行星齿轮减速
输入轴带动小齿轮(太阳轮),驱动行星齿轮旋转。
行星齿轮与外部齿圈(固定)啮合,实现初级减速(一般约为3-5倍)。
🔹 第二级:摆线针轮减速
行星齿轮通过偏心轴承带动摆线轮旋转,使其沿着针齿壳内的针齿进行摆线运动。
由于摆线轮的特殊形状,每转动一圈,其实际输出角度远小于输入角度,从而实现更大的减速比(通常为30:1 ~ 100:1)。
5、减速器企业
日本纳博特斯克(Nabtesco), 主要供应ABB、库卡(KUKA)、发那科(FANUC)、安川等全球知名机器人公司。
中大力德(LeaderDrive,中国浙江宁波)
绿的谐波(Leader Harmonic,中国江苏苏州)
北京谐波传动(China Harmonic Drive,中国北京)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









