



 上位机是用于控制自动化设备的计算机程序,它通过传感器获取设备状态,控制器分析后向执行器发送指令。开发者通常使用VS和C#进行编程,结合运动控制卡和机器视觉技术。对于PLC工程师而言,掌握上位机开发是必备技能。文章附有上位机编程入门到高级教程及工具包的领取链接。
上位机是用于控制自动化设备的计算机程序,它通过传感器获取设备状态,控制器分析后向执行器发送指令。开发者通常使用VS和C#进行编程,结合运动控制卡和机器视觉技术。对于PLC工程师而言,掌握上位机开发是必备技能。文章附有上位机编程入门到高级教程及工具包的领取链接。
当我们想要控制一个自动化设备时,我们需要使用一个特殊的计算机程序来实现。这个程序就叫做上位机,而开发这个程序的技能是非常重要的。在这个视频中,我们将向大家介绍如何用上位机开发自动化设备控制系统。
首先,让我们来理解一下自动化设备控制系统。这个系统包括三个部分:传感器、执行器和控制器。
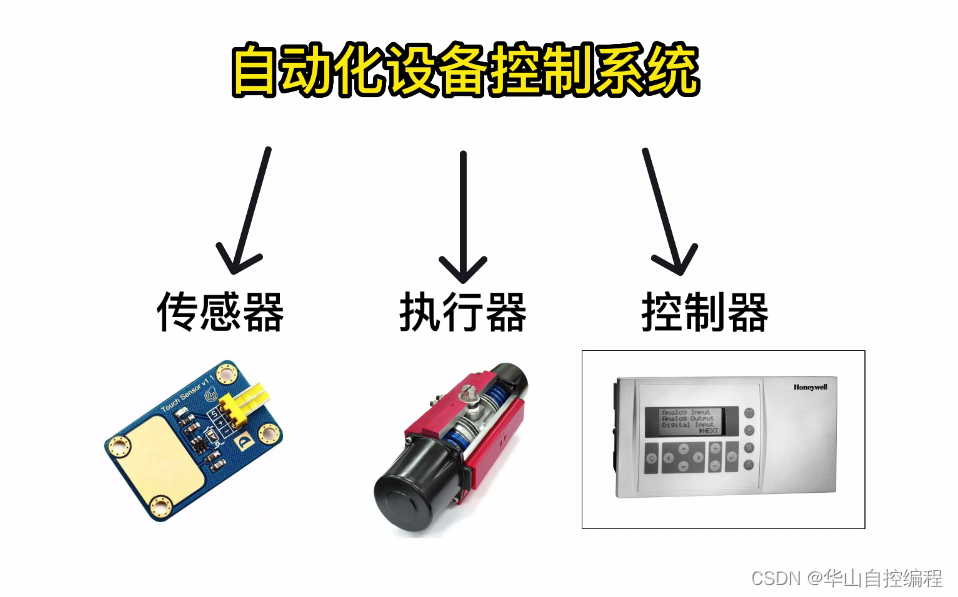
传感器会检测设备的状态和环境条件,执行器会根据控制器的指令执行动作,而控制器则会根据传感器的反馈信息来做出决策并发出指令。
控制器就像一个大脑,会收集、处理和分析来自传感器的信息,然后决定执行器要做什么。
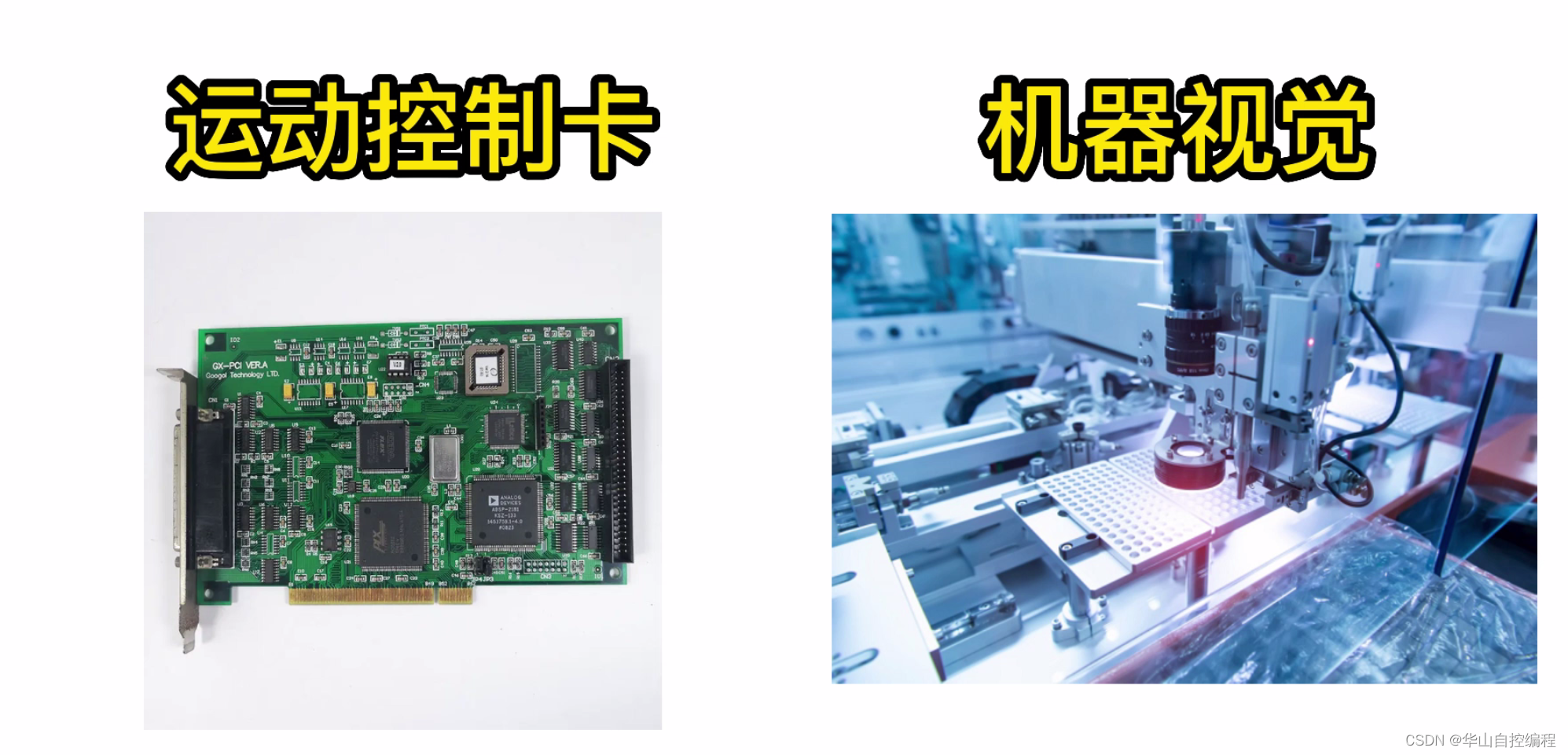
使用上位机开发自动化设备控制系统,必须选择一款合适的上位机软件,目前主流上位机软件应该是VS,使用C#编写程序来控制设备,
还用到运动控制卡和机器视觉等技术。
总的来说,使用上位机开发自动化设备控制系统是PLC工程师必须掌握的关键技能之一。
文章如果对你有用,麻烦点赞,评论~
最近很多小伙伴找我,说想要一些学习资料,然后我根据自己从业二十年经验,精心整理了一份「上位机编程入门到高级教程+工具包」,点个关注,限时分享给大家,以下是领取入口:
https://blog.csdn.net/hspx668/article/details/126586129?spm=1001.2014.3001.5501 http://上位机编程入门到高级教程+工具包
http://上位机编程入门到高级教程+工具包


















 72
72

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











