






整车控制器 基于MPC和滑模控制算法实现的车辆稳定性控制,建立了横摆角速度、侧向速度、前后质心侧偏角动力学模型作为预测模型,同时考虑车辆的稳定性可通过控制车辆的侧向速度维持在一定范围内保证车辆的稳定性,因此在模型预测控制算法(MPC)中对车辆侧向速度进行软约束(soft constrain),同时对控制量前轮转角和制动压力进行硬约束,保证执行机构能够执行到;基于单轨模型对前后轮的侧偏刚度进行了估算,提升预测模型的精度;最后通过carsim与simulink联合仿真,仿真效果良好,结果表明当车辆即将处于危险行驶时,该稳定性控制器能够迅速通过差分制动和前轮转角协调控制车辆进入稳态行驶区域。
有对应的资料(如图),是学习模型预测控制mpc和车辆动力学仿真非常好的资料,帮助你加速学习
ID:51180703275416122
脚仙他哥
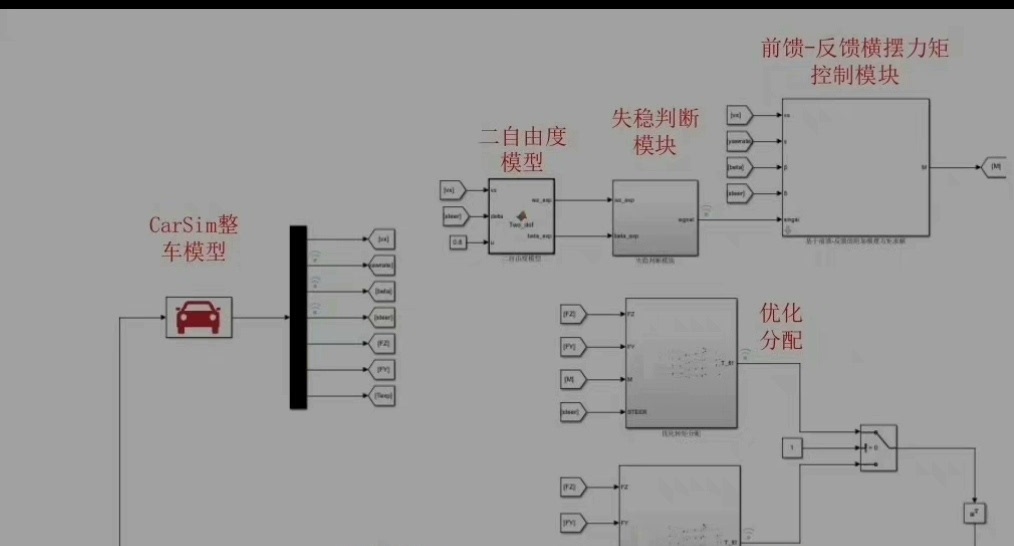
整车控制器是一种基于MPC(模型预测控制)和滑模控制算法实现的车辆稳定性控制系统。它通过建立横摆角速度、侧向速度、前后质心侧偏角动力学模型作为预测模型,以预测车辆的运动状态,并采取相应的控制策略来维持车辆的稳定性。
在车辆稳定性控制中,侧向速度是一个重要的参数。通过控制车辆的侧向速度,我们可以保持车辆在一定范围内的稳定性。为了实现这一目标,模型预测控制算法(MPC)对车辆的侧向速度进行软约束(soft constrain),即对侧向速度设置上下限,以确保车辆的稳定性。此外,MPC还对控制量前轮转角和制动压力进行硬约束,以保证执行机构能够执行所需的动作。
为了提高预测模型的精度,我们采用了单轨模型估算前后轮的侧偏刚度。通过对侧偏刚度的估算,我们可以更准确地预测车辆的运动状态,从而实现更精确的控制。
为了验证整车控制器的性能,我们进行了carsim与simulink的联合仿真。通过仿真实验,我们发现当车辆即将处于危险行驶状态时,该稳定性控制器能够迅速通过差分制动和前轮转角协调控制车辆进入稳态行驶区域。
与此同时,我们提供了一些学习MPC和车辆动力学仿真的资料(如图),这些资料能够帮助读者加快学习进程。通过学习这些资料,读者将能够更好地理解整车控制器的原理和实现方法,并能够应用于实际的车辆稳定性控制问题中。
综上所述,基于MPC和滑模控制算法实现的整车控制器在车辆稳定性控制方面具有良好的性能。通过建立预测模型、软约束和硬约束以及联合仿真等手段,该控制器能够实现车辆的稳定控制,并且在危险行驶状态下能够迅速做出相应的调整。通过学习相关资料,读者可以更好地理解和应用整车控制器。
【相关代码,程序地址】:http://fansik.cn/703275416122.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









