






船舶航向控制
基于Norrbin或者Nomoto船舶模型
PID控制/ADRC控制
YID:88129719330762511
好的0413
船舶航向控制是船舶自动控制领域中的一个重要研究方向。船舶航向控制的目标是通过调节船舶的航向来实现航行路径的规划和维持。在实际应用中,船舶航向控制需要考虑到海洋环境、船舶特性以及船舶模型等方面的因素,在这个过程中,Norrbin模型和Nomoto模型被广泛应用于船舶航向控制系统中。
Norrbin模型和Nomoto模型是两种常用的船舶动力学模型,它们分别基于不同的假设和数学模型,用于描述船舶的运动特性和动力学行为。Norrbin模型是一种线性模型,它假设船舶的动力学响应是线性的,可以通过传统的PID控制方法进行控制。而Nomoto模型则更加复杂,它考虑了船舶的非线性特性,更适用于复杂的船舶航向控制问题。在实际应用中,选择合适的船舶模型对航向控制的效果有着重要影响。
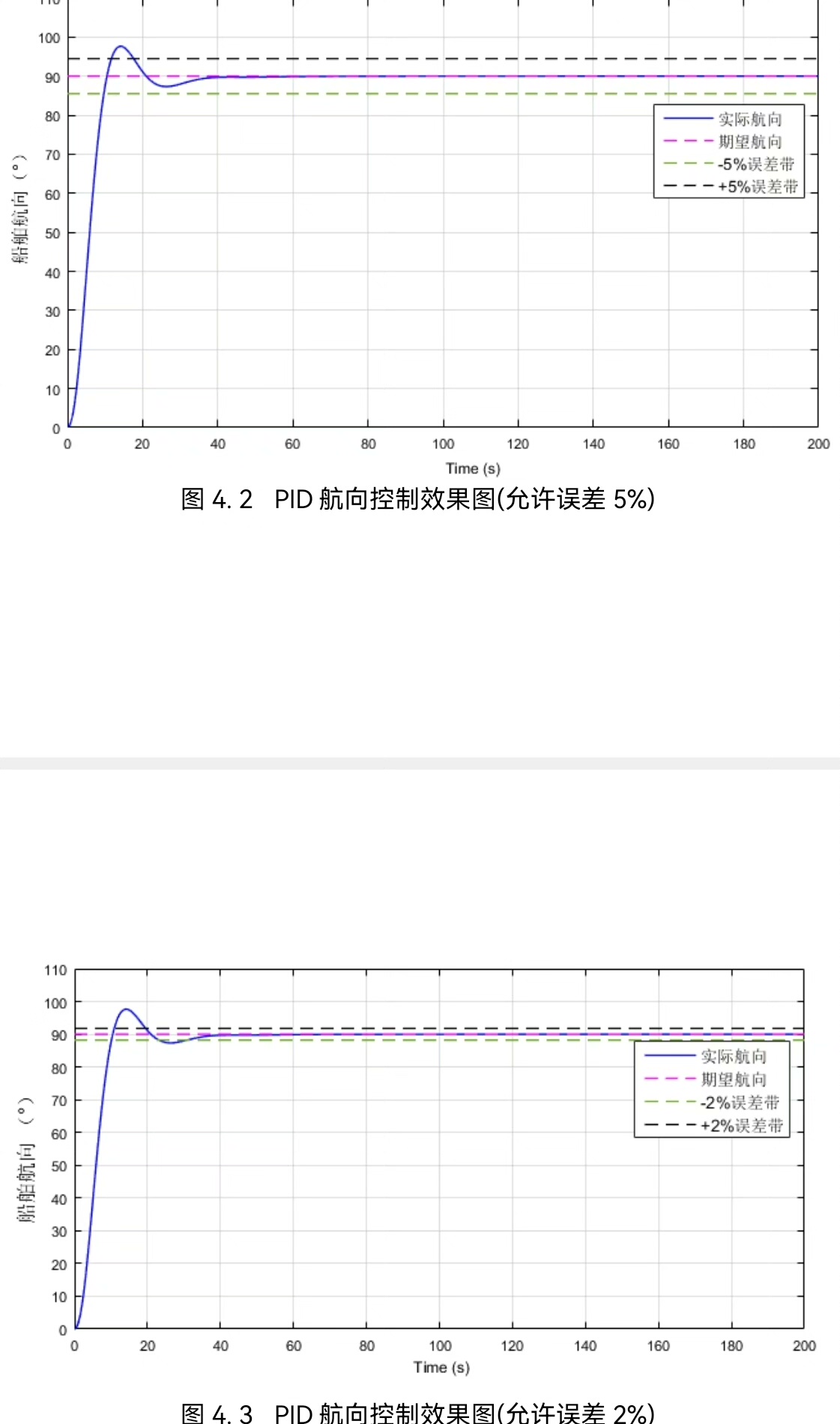
PID控制是一种经典的控制方法,它通过比较目标值和实际值的差异,并根据差异大小调整控制参数,以实现控制目标。在船舶航向控制中,PID控制被广泛应用于Norrbin模型下。PID控制算法可以根据船舶模型的特点进行参数调整,使得船舶的航向响应更加稳定和准确。然而,PID控制方法存在着对参数的手动调整和对非线性系统的适应能力较弱等缺点。
为了克服PID控制方法的局限性,近年来,基于Norrbin或者Nomoto船舶模型的船舶航向控制中,越来越多地采用了自适应控制的方法,例如ADRC(Active Disturbance Rejection Control)控制。ADRC控制方法是一种模型无关的自适应控制方法,它通过对船舶模型中的未知扰动进行估计和补偿,提高控制系统的鲁棒性和稳定性。
ADRC控制方法在船舶航向控制中的应用,可以弥补传统控制方法的不足,提高航向控制的性能和稳定性。ADRC控制方法通过模型跟踪和扰动补偿,减小了系统对船舶模型的要求,使得控制系统更加鲁棒和适应性强。
综上所述,船舶航向控制是一个复杂且重要的研究领域。在船舶航向控制中,选择合适的船舶模型是关键,Norrbin模型和Nomoto模型是常用的模型。在控制方法上,PID控制和ADRC控制是常用的方法,它们各自具有优势和适应的情景。对于船舶航向控制的进一步研究,可以进一步深化船舶模型的建立和控制算法的优化,以提高船舶航向控制的精度和鲁棒性。
相关的代码,程序地址如下:http://lanzoup.cn/719330762511.html
















 497
497

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









