






功能介绍:
0.本系统采用STC89C52作为单片机
1.LCD1602液晶显示当前输出波形类型和频率
2.可通过按键调整输出波形类型和频率
3.可通过按键设置频率更改步进值
4.支持正弦波/方波/三角波/锯齿波输出,输出频率范围:10~100Hz
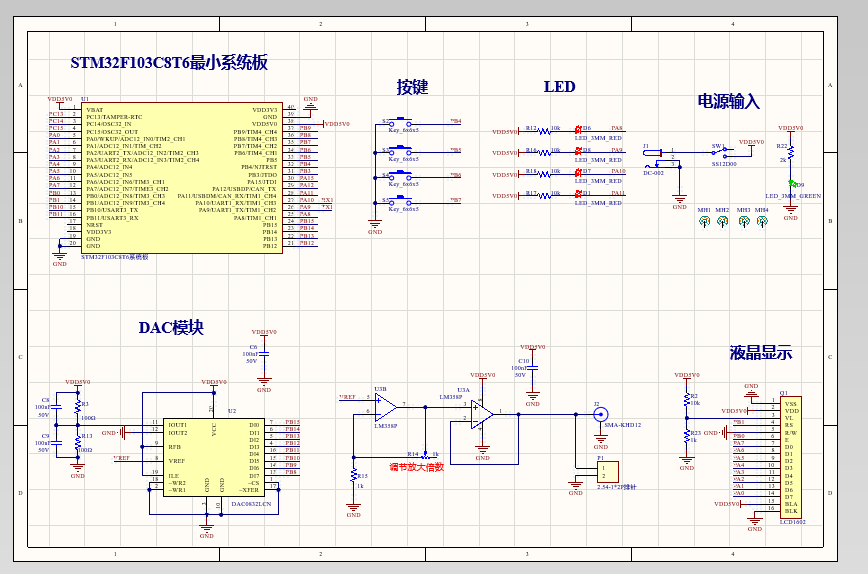
原理图:
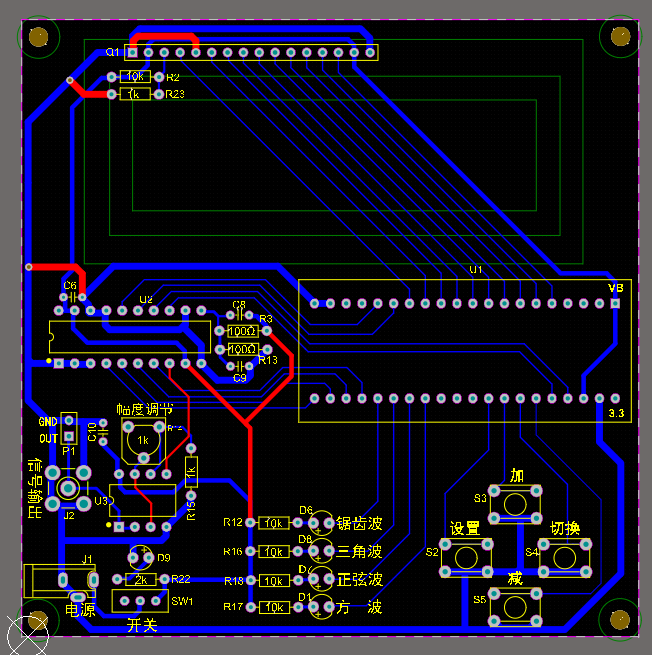
PCB:
主程序:
#define __MIAN_C
#include "main.h"
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "bsp_gpio.h"
#include "bsp_clkconfig.h"
#include "bsp_delay.h"
#include "bsp_lcd1602.h"
#include "bsp_key.h"
#include "bsp_dac0832.h"
#include "bsp_GeneralTim.h"
//自定义字符
unsigned char USER_CHAR[] = {
0x0e, 0x11, 0x11, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x11, 0x11, 0x0e, 0x00, //正弦波 0 1
0x00, 0x07, 0x04, 0x04, 0x04, 0x04, 0x1c, 0x00,
0x00, 0x1c, 0x04, 0x04, 0x04, 0x04, 0x07, 0x00, //矩形波 2 3
0x00, 0x01, 0x02, 0x04, 0x08, 0x10, 0x00, 0x00,
0x00, 0x10, 0x08, 0x04, 0x02, 0x01, 0x00, 0x00, //三角波 4 5
0x00, 0x01, 0x03, 0x05, 0x09, 0x11, 0x00, 0x00, //锯齿波 6
};
unsigned char SINE_CHAR[64] = {
135, 145, 158, 167, 176, 188, 199, 209, 218, 226, 234, 240, 245, 249, 252, 254, 254, 253, 251, 247, 243, 237, 230, 222, 213, 204, 193, 182, 170, 158,
146, 133, 121, 108, 96, 84, 72, 61, 50, 41, 32, 24, 17, 11, 7, 3, 1, 0, 0, 2, 5, 9, 14, 20, 28, 36, 45, 55, 66, 78, 90, 102, 114, 128}; //正弦波取码
unsigned char SQUARE_CHAR[64] = {
255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255, 255,
255, 255, 255, 255, 255, 255, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}; //矩形波取码
unsigned char TRIANGLE_CHAR[64] = {
0, 8, 16, 24, 32, 40, 48, 56, 64, 72, 80, 88, 96, 104, 112, 120, 128, 136, 144, 152, 160, 168, 176, 184, 192, 200, 208, 216, 224, 232, 240, 248,
248, 240, 232, 224, 216, 208, 200, 192, 184, 176, 168, 160, 152, 144, 136, 128, 120, 112, 104, 96, 88, 80, 72, 64, 56, 48, 40, 32, 24, 16, 8, 0}; //三角波取码
unsigned char ZIGZAG_CHAR[64] = {
0, 4, 8, 12, 16, 20, 24, 28, 32, 36, 40, 45, 49, 53, 57, 61, 65, 69, 73, 77, 81, 85, 89, 93, 97, 101, 105, 109, 113, 117, 121, 125, 130, 134, 138, 142,
146, 150, 154, 158, 162, 166, 170, 174, 178, 182, 186, 190, 194, 198, 202, 206, 210, 215, 219, 223, 227, 231, 235, 239, 243, 247, 251, 255}; //锯齿波取码
// 局部变量,用于保存转换计算后的电压值
CreatByte Flag;
enum _MODE_DF_ dispMode;
char g_wave = 0;
char g_cnt; //定义全局变量
int g_freq = 100; //*0.1Hz
int g_step = 1;
int g_mode;
int g_stepDisp = 1;
unsigned char g_table_num[] = "0123456789"; //定义显示的数组
unsigned char g_table_str[] = "Freq: Wave form:";
unsigned char pwmValue = 50;
unsigned char outValue = 0;
unsigned char dataBuf = 0;
int main(void)
{
// 使用HSI,SYSCLK = 4M * RCC_PLLMul_x, x:[2,3,...16],最高是64MH
HSI_SetSysClock(RCC_PLLMul_2); //使用内部8MHz晶振,并设置PLL输出为8MHz
// 端口初始化
GPIO_Config();
GENERAL_TIM_Init();
DelayMs(200);
Key_GPIO_Config();
DelayMs(200);
LCD_GPIO_Init();
DelayMs(200);
Init_LCD();
DelayMs(200);
DAC0832_GPIO_Init();
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 156250 / g_freq;
// 时钟预分频数
TIM_TimeBaseStructure.TIM_Prescaler = GENERAL_TIM2_Prescaler;
// 时钟分频因子 ,没用到不用管
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
// 计数器计数模式,设置为向上计数
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
// 重复计数器的值,没用到不用管
TIM_TimeBaseStructure.TIM_RepetitionCounter = 0;
// 初始化定时器
TIM_TimeBaseInit(GENERAL_TIM2, &TIM_TimeBaseStructure);
while (1)
{
if (g_mode == 0)
{
KeyScan();
//Display();
}
ScanStep();
switch (g_wave)
{
case 0:
dataBuf = SQUARE_CHAR[g_cnt];
dataBuf=(dataBuf<<4)|(dataBuf>>4);
dataBuf=((dataBuf<<2)&0xcc)|((dataBuf>>2)&0x33);
dataBuf=((dataBuf<<1)&0xaa)|((dataBuf>>1)&0x55);
GPIO_Write(DAC0832_GPIO_PORT, (((unsigned int)dataBuf<<8) | (GPIO_ReadOutputData(DAC0832_GPIO_PORT) & (~DAC0832_GPIO_PIN))));
LED_ZIGZAG_OFF;
LED_SQUARE_ON;
break;
case 1:
dataBuf = SINE_CHAR[g_cnt];
dataBuf=(dataBuf<<4)|(dataBuf>>4);
dataBuf=((dataBuf<<2)&0xcc)|((dataBuf>>2)&0x33);
dataBuf=((dataBuf<<1)&0xaa)|((dataBuf>>1)&0x55);
GPIO_Write(DAC0832_GPIO_PORT, (((unsigned int)dataBuf<<8) | (GPIO_ReadOutputData(DAC0832_GPIO_PORT) & (~DAC0832_GPIO_PIN))));
LED_SQUARE_OFF;
LED_SINE_ON;
break;
case 2:
dataBuf = TRIANGLE_CHAR[g_cnt];
dataBuf=(dataBuf<<4)|(dataBuf>>4);
dataBuf=((dataBuf<<2)&0xcc)|((dataBuf>>2)&0x33);
dataBuf=((dataBuf<<1)&0xaa)|((dataBuf>>1)&0x55);
GPIO_Write(DAC0832_GPIO_PORT, (((unsigned int)dataBuf<<8) | (GPIO_ReadOutputData(DAC0832_GPIO_PORT) & (~DAC0832_GPIO_PIN))));
LED_SINE_OFF;
LED_TRIANGLE_ON;
break;
case 3:
dataBuf = ZIGZAG_CHAR[g_cnt];
dataBuf=(dataBuf<<4)|(dataBuf>>4);
dataBuf=((dataBuf<<2)&0xcc)|((dataBuf>>2)&0x33);
dataBuf=((dataBuf<<1)&0xaa)|((dataBuf>>1)&0x55);
GPIO_Write(DAC0832_GPIO_PORT, (((unsigned int)dataBuf<<8) | (GPIO_ReadOutputData(DAC0832_GPIO_PORT) & (~DAC0832_GPIO_PIN))));
LED_TRIANGLE_OFF;
LED_ZIGZAG_ON;
break;
}
}
}
void Display(void) //显示函数
{
uchar kilobit, hundredbit, tenbit, unitbit;
kilobit = g_freq / 1000;
hundredbit = g_freq % 1000 / 100;
tenbit = g_freq % 1000 % 100 / 10;
unitbit = g_freq % 1000 % 100 % 10;
LCD_WriteCommand(0x80 + 0x40 + 0x09);
if (kilobit == 0)
LCD_WriteData(' ');
else
LCD_WriteData(g_table_num[kilobit]);
if (kilobit == 0 && hundredbit == 0)
LCD_WriteData(' ');
else
LCD_WriteData(g_table_num[hundredbit]);
LCD_WriteData(g_table_num[tenbit]);
LCD_WriteData('.');
LCD_WriteData(g_table_num[unitbit]);
LCD_WriteData('H');
LCD_WriteData('z');
if (g_wave == 0)
{
LCD_WriteCommand(0x80 + 10);
LCD_WriteData(2);
LCD_WriteData(3);
LCD_WriteData(2);
LCD_WriteData(3);
LCD_WriteData(2);
LCD_WriteData(3);
}
if (g_wave == 1)
{
LCD_WriteCommand(0x80 + 10);
LCD_WriteData(0);
LCD_WriteData(1);
LCD_WriteData(0);
LCD_WriteData(1);
LCD_WriteData(0);
LCD_WriteData(1);
}
if (g_wave == 2)
{
LCD_WriteCommand(0x80 + 10);
LCD_WriteData(4);
LCD_WriteData(5);
LCD_WriteData(4);
LCD_WriteData(5);
LCD_WriteData(4);
LCD_WriteData(5);
}
if (g_wave == 3)
{
LCD_WriteCommand(0x80 + 10);
LCD_WriteData(6);
LCD_WriteData(6);
LCD_WriteData(6);
LCD_WriteData(6);
LCD_WriteData(6);
LCD_WriteData(6);
}
}
void DisplayStep(void)
{
u8 hundredbit, tenbit, unitbit;
hundredbit = g_stepDisp / 100;
tenbit = g_stepDisp % 100 / 10;
unitbit = g_stepDisp % 100 % 10;
LCD_WriteCommand(0x80 + 11);
if (hundredbit == 0)
LCD_WriteData(' ');
else
LCD_WriteData(g_table_num[hundredbit]);
LCD_WriteData(g_table_num[tenbit]);
LCD_WriteData('.');
LCD_WriteData(g_table_num[unitbit]);
}
void ScanStep(void)
{
if (KEY_SET == 0)
{
DelayMs(5);
if (KEY_SET == 0)
{
while (!KEY_SET)
;
g_mode++;
if (g_mode == 1)
{
LCD_WriteCommand(0x01);
LCD_WriteCommand(0x80);
DelayMs(1); //step value
LCD_WriteData('S');
DelayMs(1); //step value
LCD_WriteData('t');
DelayMs(1);
LCD_WriteData('e');
DelayMs(1);
LCD_WriteData('p');
DelayMs(1);
LCD_WriteData(' ');
DelayMs(1);
LCD_WriteData('v');
DelayMs(1);
LCD_WriteData('a');
DelayMs(1);
LCD_WriteData('l');
DelayMs(1);
LCD_WriteData('u');
DelayMs(1);
LCD_WriteData('e');
DelayMs(1);
LCD_WriteData(':');
DelayMs(1);
g_stepDisp = g_step;
DisplayStep();
}
if (g_mode == 2)
{
g_mode = 0;
g_step = g_stepDisp;
Init_LCD();
//Init_Timer();
Display();
}
}
}
if (g_mode == 1)
{
if (KEY_ADD == 0)
{
DelayMs(160);
if (KEY_ADD == 0)
{
//while (!KEY_ADD);
g_stepDisp++;
if (g_stepDisp >= 101)
{
g_stepDisp = 1;
}
DisplayStep();
}
}
if (KEY_SUB == 0)
{
DelayMs(160);
if (KEY_SUB == 0)
{
//while (!KEY_SUB);
g_stepDisp--;
if (g_stepDisp <= 0)
{
g_stepDisp = 100;
}
DisplayStep();
}
}
}
}
/*********************************************END OF FILE**********************/















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









