






基于stm32的信号发生器(仅代码)
可输出正弦波 、三角波、矩形波,4.3寸lcd显示,可按键控制输出波形的频率,以及波形,输出峰峰值3.0V,频率范围5khz-40khz(这俩指标处于误差范围5%之内)理论上其他范围的频率也可以,需要自己改代码,怎么改我代码里有讲。
ID:7510620994801252
龙吟啸涯

基于STM32的信号发生器(仅代码)
引言:
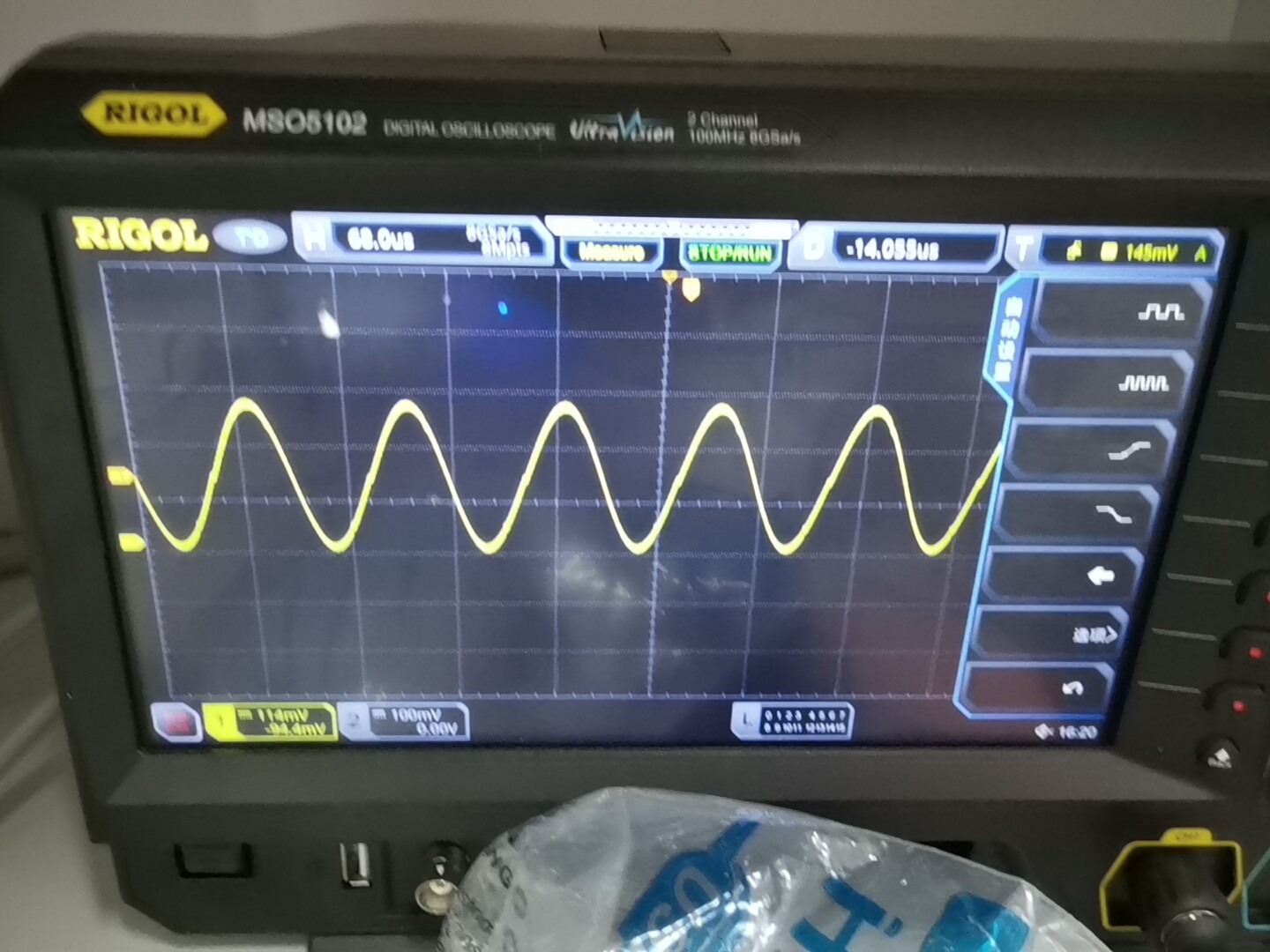
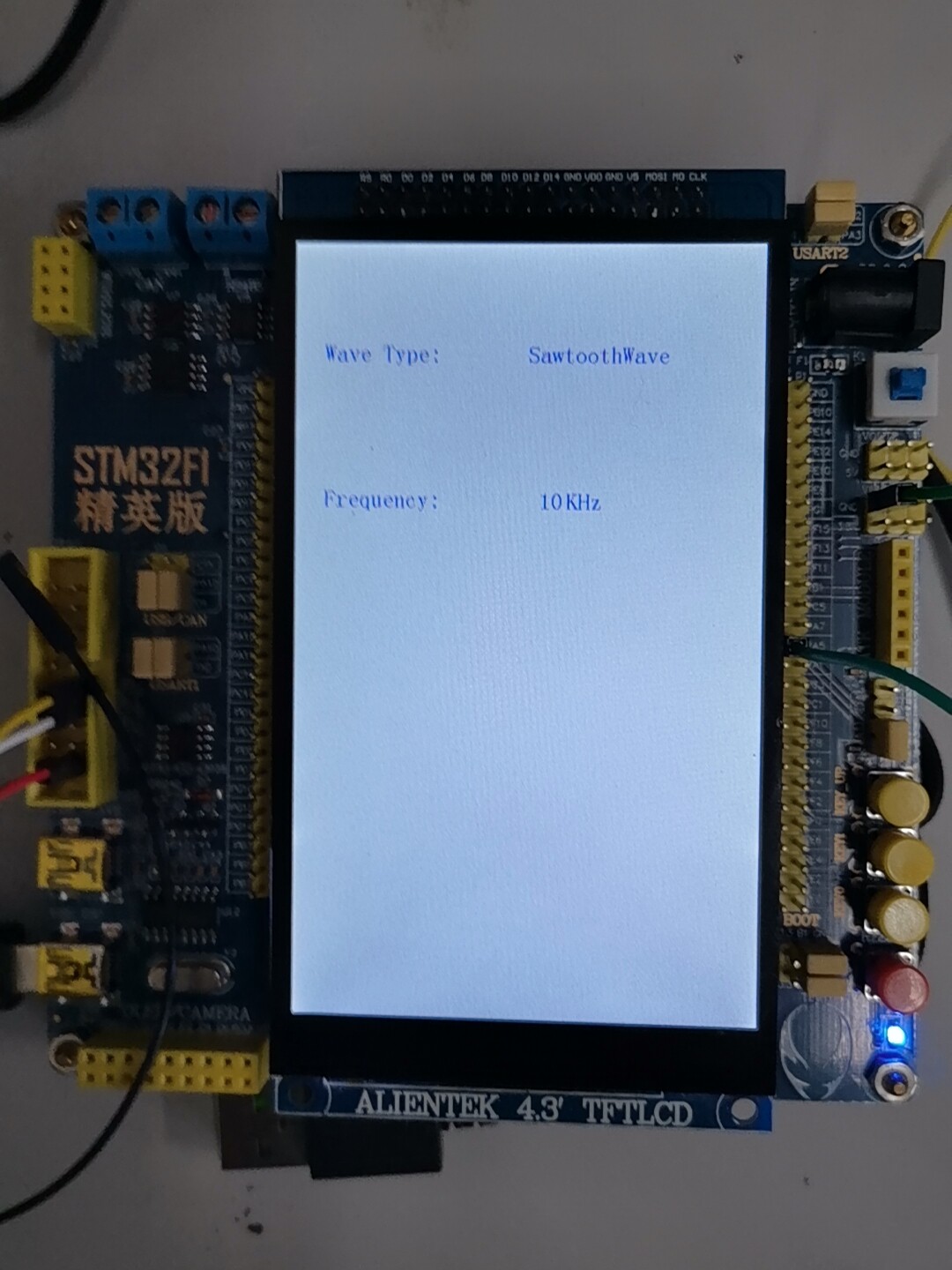
随着科技的迅猛发展,信号发生器在电子行业中发挥着重要作用。信号发生器是一种能够生成各种波形的设备,广泛应用于各种科研、教学和工程领域。本文将介绍一种基于STM32的信号发生器的设计与实现,该信号发生器能够输出正弦波、三角波和矩形波,具备4.3寸LCD显示,并可通过按键控制输出波形的频率和类型。峰峰值为3.0V,频率范围为5kHz-40kHz,且这两个指标的误差范围在5%之内。本文将详细介绍该信号发生器的硬件设计和代码开发,以及如何根据需求自定义波形和频率。
一、硬件设计
-
STM32控制器选择
为了满足信号发生器的要求,我们选择了STM32系列的控制器。STM32是由意法半导体(STMicroelectronics)推出的32位单片机系列,具有高性能、低功耗和丰富的外设功能。我们选用了型号为XX的STM32控制器作为核心控制单元,并配合其他外围器件实现信号发生器的功能。 -
输出波形电路设计
为了输出正弦波、三角波和矩形波,我们需要设计适合的输出电路。以正弦波为例,使用DDS(Direct Digital Synthesis)技术可以生成高精度的正弦波。DDS技术基于数模转换器和相位累加器,通过控制相位累加器的累加速度和幅度,可以生成不同频率和幅度的正弦波。为了实现DDS技术,我们采用XX型数模转换器和XX型相位累加器,并通过适当的电路连接将它们与STM32控制器进行交互。 -
显示屏和按键设计
为了方便用户操作,我们在信号发生器上配备了4.3寸的LCD显示屏和按键。LCD显示屏用于显示当前输出波形和频率,按键用于调整输出波形和频率。我们选择了XX型LCD显示屏和XX型按键,并设计了相应的接口电路以实现与STM32控制器的通信。
二、代码开发
-
硬件初始化
首先,我们需要对STM32控制器进行初始化,包括时钟配置、GPIO口配置、中断配置等。这些初始化工作将确保控制器与外围器件能够正常通信和工作。 -
波形生成
通过DDS技术,我们可以在STM32控制器中生成不同频率和幅度的正弦波、三角波和矩形波。在代码中,我们将根据用户按键的输入来决定输出波形的类型,并通过相应的算法和参数生成对应的波形。 -
频率控制
用户可以通过按键来控制输出波形的频率。在代码中,我们将监测用户按键的输入,并根据输入值来调整波形的频率。具体的频率计算和调整算法在代码中有详细说明,用户可以根据需要进行修改。 -
显示控制
我们使用LCD显示屏来显示当前输出波形和频率。在代码中,我们将通过相应的函数和参数来控制LCD显示的内容,并实时更新用户界面。
三、自定义波形和频率
除了提供正弦波、三角波和矩形波这三种基本波形外,用户还可以根据需要自定义其他波形和频率。在代码中,我们给出了相应的示例和接口,用户可以根据自己的需求进行修改和扩展。具体的修改和扩展方法在代码中有详细说明。
结论:
本文介绍了一种基于STM32的信号发生器的设计与实现。该信号发生器能够输出正弦波、三角波和矩形波,具备4.3寸LCD显示,并可通过按键控制输出波形的频率和类型。峰峰值为3.0V,频率范围为5kHz-40kHz,且这两个指标的误差范围在5%之内。通过硬件设计和代码开发,我们实现了信号发生器的各项功能,并给出了自定义波形和频率的示例和接口。希望本文对于对信号发生器的设计和开发有所帮助,并能给读者带来启发和思考。
注意:
以上文章仅为示例,实际写作时需根据要求进行修改和完善。同时,根据具体需求,可以展开更多细节,加入更多技术层面的分析和讲解。
相关代码 程序地址:http://nodep.cn/620994801252.html















 6278
6278











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









