






一、系统概述
本系统基于单片机设计,用于控制十字路口的红绿灯信号。系统具备多种功能,包括红绿灯转换时的黄灯闪烁、主干道与辅干道的通行时间控制、手动/自动/特殊情况三种模式的切换、特殊情况下的红灯全亮以及自动模式下的倒计时显示,以及夜间模式的黄灯常亮。
二、硬件设计
-
单片机选型:选用合适的单片机作为主控芯片,如STC89C52等,具备足够的IO口和定时器资源。
-
LED灯连接:红绿黄LED灯分别连接至单片机的P1口,通过控制P1口的电平状态实现LED灯的点亮和熄灭。
-
按键连接:使用单片机的P3口连接按键,实现手动、自动和特殊情况三种模式的切换。
-
LED数码管连接:LED数码管连接至单片机的其他IO口,用于显示倒计时时间。
三、软件设计
-
初始化程序:初始化单片机的IO口、定时器等资源。
-
黄灯闪烁程序:利用延时函数实现黄灯闪烁三次,每次闪烁时间为2秒,总时间为6秒。
-
通行时间控制程序:设置主干道和辅干道的通行时间,利用定时器中断实现计时,并控制相应的LED灯状态。
-
模式切换程序:通过检测P3口的按键状态实现手动、自动和特殊情况三种模式的切换。
-
特殊情况处理程序:在特殊情况下,将所有路口的红灯点亮,其他灯熄灭。
-
倒计时显示程序:在自动模式下,利用定时器中断和LED数码管显示当前状态的倒计时时间。
-
夜间模式程序:在夜间模式下,使四个路口的黄灯常亮。
四、功能实现
-
功能1实现:在红绿灯转换时,先点亮黄灯并闪烁三次,然后切换至下一状态的灯。
-
功能2实现:设置主干道和辅干道的通行时间,以及单独左转信号的时长,并通过控制LED灯的状态实现通行信号的变化。
-
功能3实现:通过按键检测实现手动、自动和特殊情况三种模式的切换,并在不同模式下执行相应的控制逻辑。
-
功能4实现:在特殊情况下,将所有路口的红灯点亮,为紧急车辆(如120、110)提供通行。
-
功能5实现:在自动模式下,利用定时器中断和LED数码管显示当前状态的倒计时时间。
-
功能6实现:在夜间模式下,将四个路口的黄灯常亮,以提供足够的照明。
五、系统测试与调试
完成硬件制作和软件编程后,对系统进行全面的测试和调试,确保各项功能正常工作,并优化性能。
六、总结与展望
本文介绍了一种基于单片机的十字路口红绿灯控制器的设计方案。通过合理的硬件设计和软件编程,实现了多种功能,提高了交通管理的效率和安全性。未来,可以进一步优化算法和电路设计,提高系统的响应速度和稳定性,以适应更复杂的交通场景。
include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
sbit wela = P2^7; // 数码管位选
sbit dula = P2^6; // 数码管段选
// 下面是八个交通灯对应的位定义
sbit LED1_blue = P1^0;
sbit LED1_red = P1^1;
sbit LED1_green = P1^2;
sbit LED1_yellow = P1^3;
sbit LED2_blue = P1^4;
sbit LED2_red = P1^5;
sbit LED2_green = P1^6;
sbit LED2_yellow = P1^7;
// 按键位定义
sbit key_auto = P3^0; // 自动
sbit key_step = P3^1; // 手动
sbit key_emerg = P3^2; // 紧急情况 110/120通过
sbit key_night = P3^6;// 夜间模式
uint cnt = 0; // 记录定时器定时了多少毫秒
uint sec = 0; // 记录定时器计时了多少秒
uchar light_num = 0;
// 四位八段共阴极数码管数字显示编码
uchar code table[]={
//"0" "1" "2" "3"
0x3f,0x06,0x5b,0x4f,
//"4" "5" "6" "7"
0x66,0x6d,0x7d,0x07,
//"8" "9" "A" "B"
0x7f,0x6f,0x77,0x7c,
//"C" "D" "E" "F"
0x39,0x5e,0x79,0x71
};
uchar code light[]={
// 主G辅R 主G辅R 主Y辅R
0xdb, 0xde, 0xd7,
// 主R辅G 主R辅B 主R辅R
0xbd, 0xed, 0x7d,
0xdf, 0xee, 0xdd
};
/*************函数声明********************/
void delay_ms(uint);
void system_Init();
void Display_R_time(uchar);
void Display_C_time(uchar);
void key_scan();
void main()
{
system_Init();
while(1)
{
key_scan();
}
}
// 毫秒级延时
void delay_ms(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=123;y>0;y--);
}
// 系统初始化
void system_Init()
{
wela=0; // 关闭位选
dula=0; // 关闭段选
TMOD=0x01; // 定时器0方式1 16位
TH0=0x4c; // 定时器装初值 50ms(11.05926MHz TH0=0x4c TL0=0x00)
TL0=0x00; // (12MHz 的初值是 TH0=0x3c TL0=0xb0)
EA=1; // 开总中断
ET0=1; // 开定时器0中断
TR0=1; // 允许中断溢出
}
// 显示横向的(即辅干道)倒计时
void Display_R_time(uchar time)
{
uchar time_tens, time_ones;
time_tens = time / 10; // 提取倒计时时间的十位数
time_ones = time % 10; // 提取倒计时时间的个位数
// 下面对两位数倒计时时间进行显示(数码管)
P0=0xff;
wela=1;
P0=0xbf;
wela=0;
dula=1;
P0=table[time_tens];
dula=0;
delay_ms(1);
P0=0xff;
wela=1;
P0=0x7f;
wela=0;
dula=1;
P0=table[time_ones];
dula=0;
delay_ms(1);
}
// 显示竖向的(即主干道)倒计时
void Display_C_time(uchar time)
{
uchar time_tens, time_ones;
time_tens = time / 10;
time_ones = time % 10;
P0=0xff;
wela=1;
P0=0xfb;
wela=0;
dula=1;
P0=table[time_tens];
dula=0;
...部分代码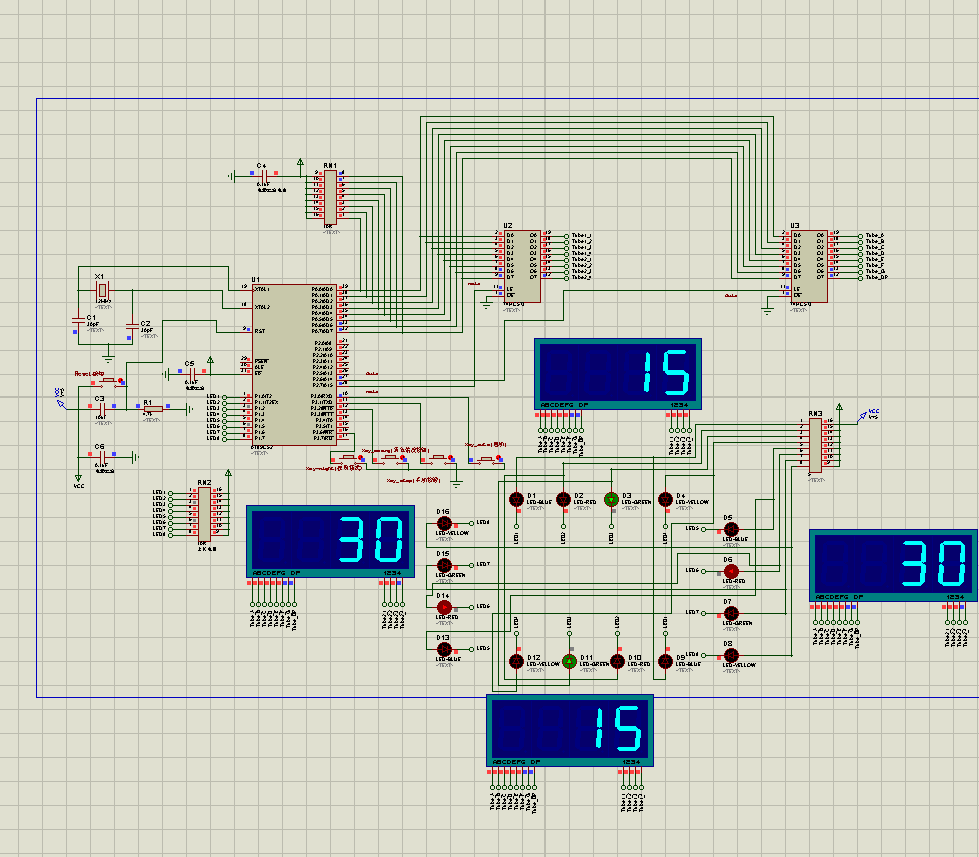

资料下载地址:
https://docs.qq.com/doc/p/ffc421513a628b30450ae742547c0b850456d7c8















 8222
8222











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









