






仿射变换也称仿射投影,是指几何中,对一个向量空间进行线性变换并接上一个平移,变换为另一个向量空间。所以,仿射变换其实也就是将两个向量空间的进行变换。
仿射变换主要包括:平移,旋转,缩放,倾斜,翻转
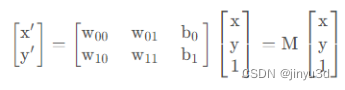
假设有一个向量空间k k=(x,y),还有一个向量 j j=(x’,y’),如果想从向量k转换到j 则:j=k*w+b
上式可以拆分为: x’=x*w00+y*w01+b0
Y’=x*w10+y*w11+b1
要进行仿射变换,必须先获取变换矩阵。要获取变换矩阵,必须先获取特征点坐标、角度等信息,几何匹配和blob是获取特征点的高效方法,除此之外还有其它方法,只要能稳定的求出特延点即可。
仿射变换流程
(1)获取特征点坐标、角度
(2)计算仿射变换矩阵
(3)对图像、区域、轮廓进行仿射变换
下面介绍通过点计算仿射变换矩阵
1.vector_to_rigid( : : Px, Py, Qx, Qy : HomMat2D)
2.vector_to_similarity( : : Px, Py, Qx, Qy : HomMat2D)
3.vector_to_aniso( : : Px, Py, Qx, Qy : HomMat2D)
4.vector_to_hom_mat2d(::Px,Py,Qx,Qy:HomMat2D)
vector_to_rigid 这个是刚性变换,

只有旋转和平移。
vector_to_similarity 这个是相似变换

旋转和平移,加各方向等比例缩放
vector_to_aniso 仿射变换

旋转、平移、各方向不同比例缩放
vector_to_hom_mat2d(::Px,Py,Qx,Qy:HomMat2D)
功能:根据三个以上点对计算仿射变换矩阵,支持旋转、平移、缩放、斜切
Px:(输入参数)原始点组的x坐标
Py:(输入参数)原始点组的y坐标
Qx:(输入参数)变换的目的点组的x坐标
Qy:(输入参数)变换的目的点组的y坐标
HomMat2D:(输出参数)输出仿射变换矩阵
计算仿射变换参数
hom_mat2d_to_affine_par(::HomMat2D:Sx,Sy,Phi,Theta,Tx,Ty)
功能:根据仿射变换矩阵(齐次二维变换矩阵)计算仿射变换参数
HomMat2D(输入参数):仿射变换矩阵
Sx(输出参数):x方向的缩放因子(如果从图像空间变换到物理空间,就是x方向的 像素单量)
Sy(输出参数):y方向的缩放因子(如果从图像空间变换到物理空间,就是y方向的 像素单量)
Phi(输出参数):旋转角度
Theta(输出参数):斜切角度
Tx(输出参数):沿x方向平移的距离
Ty(输出参数):沿y方向平移的距离


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









