






目录
①在串口中断中获取数据,将其存入串口环形缓冲区中,每次获取14个字节,此处用串口0;
②对获取数据的帧头帧尾进行校验,若检验通过则将数据取出作为原始数据
一、使用体验
光流模块在飞控系统中通常用于无人机或其他自主飞行设备。它的主要作用是通过视觉感知来测量飞行器相对于地面的运动,特别是在低高度和室内环境中。经过多方面考虑,我们选择了优象的激光光流二合一T2模块。
模块优点:
体积小巧,质量小,便于装上飞行器;
功能集成性强,结合了激光测距和光流两个功能,同时只占用一个串口,缓解了我们当时无人机串口紧张的情况;
定点能力、抗强光干扰能力强;


优象光流的用户使用手册非常优秀详细,使用过程中遇到的绝大部分问题都可以在手册中找到解答,其中也包括了飞控端调试光流方法说明,为我们对飞控的学习和对光流模块的理解提高了很大的帮助。
优象激光光流二合一模块淘宝店铺链接https://m.tb.cn/h.ghwqHFqOqmV6nb1?tk=wLOy30q6Hyg
二、飞控端数据解析获取部分
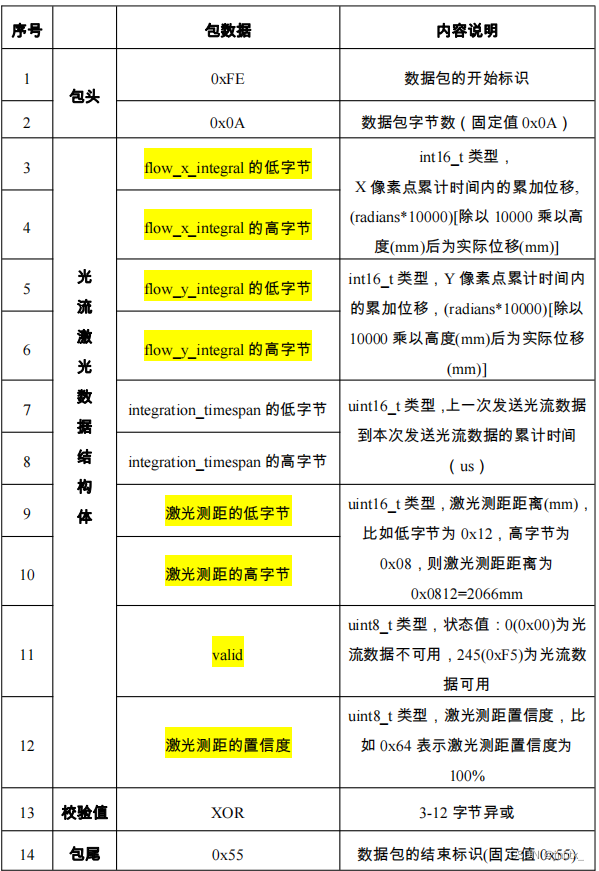
1、光流数据字节含义分析
2、通过串口通信对光流原始数据获取、解析
①在串口中断中获取数据,将其存入串口环形缓冲区中,每次获取14个字节,此处用串口0;
//相关变量定义
#define RINGBUFF_LEN 200
typedef struct
{
uint16_t Head;
uint16_t Tail;
uint16_t Lenght;
uint8_t Ring_Buff[RINGBUFF_LEN];
} RingBuff_t;
RingBuff_t COM0_Rx_Buf,COM1_Rx_Buf,COM2_Rx_Buf,COM3_Rx_Buf;
//串口中断函数
void UART0_IRQHandler(void)
{
uint32_t flag = UARTIntStatus(UART0_BASE,1);//获取中断标志 原始中断状态 屏蔽中断标志
UARTIntClear(UART0_BASE,flag);//清除中断标志
while(UARTCharsAvail(UART0_BASE))//判断FIFO是否还有数据
{
RingBuf_Write(UARTCharGet(UART0_BASE),&COM0_Rx_Buf,14);//往环形队列里面写数据,每次获取14个字节
}
}
//写入函数,将数据写入串口环形缓冲区中
void RingBuf_Write(unsigned char data,RingBuff_t *ringBuff,uint16_t Length)
{
ringBuff->Ring_Buff[ringBuff->Tail]=data;//从尾部追加
if(++ringBuff->Tail >= Length)//尾节点偏移
ringBuff->Tail=0;//大于数组最大长度 归零 形成环形队列
if(ringBuff->Tail==ringBuff->Head)//如果尾部节点追到头部节点,则修改头节点偏移位置丢弃早期数据
{
if((++ringBuff->Head) >= Length)
ringBuff->Head=0;
}
}②对获取数据的帧头帧尾进行校验,若检验通过则将数据取出作为原始数据
//相关变量定义
#define OpticalFlow_Ringbuf COM0_Rx_Buf
typedef struct {
signed short pixel_flow_x_integral;//像素光流x方向的积分
signed short pixel_flow_y_integral;//像素光流y方向的积分
unsigned short ground_distance; //对地距离
unsigned short flow_trust; //光流状态值
unsigned short laser_valid; //激光测距置信度
unsigned int integration_timespan;//相邻两次测量的间隔时间
unsigned char qual;
} flow_integral_frame;
flow_integral_frame opt_origin_data;//光流原始数据
//光流数据解析函数
uint8_t Optflow_Prase()
{
//帧头帧尾校验,若通过校验则取出数据
for(uint16_t i=0; i<14; i++)
{
if(OpticalFlow_Ringbuf.Ring_Buff[i]==0xfe//帧头
&&OpticalFlow_Ringbuf.Ring_Buff[i+1]==0x0a//帧头
&&OpticalFlow_Ringbuf.Ring_Buff[i+13]==0x55)//帧尾
{
//光流原始数据获取
opt_origin_data.pixel_flow_x_integral=(int16_t)(OpticalFlow_Ringbuf.Ring_Buff[i+3]<<8)|OpticalFlow_Ringbuf.Ring_Buff[i+2];
opt_origin_data.pixel_flow_y_integral=(int16_t)(OpticalFlow_Ringbuf.Ring_Buff[i+5]<<8)|OpticalFlow_Ringbuf.Ring_Buff[i+4];
opt_origin_data.ground_distance=(int16_t)(OpticalFlow_Ringbuf.Ring_Buff[i+9]<<8)|OpticalFlow_Ringbuf.Ring_Buff[i+8];
opt_origin_data.laser_valid=OpticalFlow_Ringbuf.Ring_Buff[i+10];
opt_origin_data.flow_trust=OpticalFlow_Ringbuf.Ring_Buff[i+11];
}
}
}三、光流数据飞控端的处理
光流数据在飞控端的处理可以分为两种情况,一是只使用光流纯数据;二是
将光流数据与加速度计进行融合。

1.只使用光流纯数据的处理方法
直接使用纯光流数据进行控制,平滑性与抗环境干扰性会差一些,但好处是处理简单,需要调试的参数少
opt_data.x=(opt_origin_data.pixel_flow_x_integral*opticalflow_high)/10000.0f;//单位:乘以高度单位mm后为实际位移mm
opt_data.y=(opt_origin_data.pixel_flow_y_integral*opticalflow_high)/10000.0f;//单位:乘以高度单位mm后为实际位移mm
//时间间隔
opt_data.dt=(int16_t)(opt_origin_data.integration_timespan*0.001f);//单位ms
Optflow.div=(tfdata.distance-tfdata.last_distance)/opt_data.dt; //观测速度
Optflow.acc=(tfdata.div-tfdata.last_div)/opt_data.dt; //观测加速度
Optflow.last_distance=tfdata.distance; //观测距离保存
Optflow.last_div=tfdata.div; //观测速度保存
2.光流与加速度计融合的处理方法
当单独使用光流数据时,通常能够实现良好的静态悬停效果。然而,若要达到更高级的功能,比如提升抗风性能、精确的位移控制以及目标跟随能力,就需要将光流数据与加速度计数据融合,以获取更为精确、平滑和实时的信息。
typedef struct
{
float distance;
float last_distance;
float div;
float acc;
float last_div;
}Optflow;
typedef struct
{
float x;
float y;
unsigned short dt;
unsigned char qual;
unsigned char update;
} flow_float;
typedef struct
{
float x;
float y;
}Vector2f;
typedef struct
{
float a[3];
float b[3];
} Butter_Parameter;
typedef struct
{
float Input_Butter[3];
float Output_Butter[3];
} Butter_BufferData;
Vector2f opt_filter_data; //滤波后的像素位移
Vector2f opt_gyro_data; //光流角速度
Vector2f opt_gyro_filter_data;//光流经过旋转互补滤波后的角速度
Butter_Parameter OpticalFlow_Parameter,OpticalFlow_Gyro_Parameter;
Butter_BufferData Buffer_OpticalFlow[2],Buffer_OpticalFlow_Gyro[2];
flow_float opt_data;
float OpticalFlow_Rotate_Complementary_Filter(float optflow_gyro,float gyro,uint8_t axis)//光流旋转互补滤波器
{
float optflow_gyro_filter=0;
if(axis=='x') optflow_gyro_filter=optflow_gyro-constrain_float(gyro,-4.0f,4.0f);//4
else optflow_gyro_filter=optflow_gyro-constrain_float(gyro,-4.0f,4.0f);
return optflow_gyro_filter;
}
float constrain_float(float amt, float low, float high)
{
if (isnan(amt))
{
return (low+high)*0.5f;
}
return ((amt)<(low)?(low):((amt)>(high)?(high):(amt)));
}
//以下部分写在Optflow_Prase()光流数据解析函数中
//加速度计低通滤波器数据
opt_filter_data.x=LPButterworth(opt_origin_data.pixel_flow_x_integral,&Buffer_OpticalFlow[0],&OpticalFlow_Parameter);
opt_filter_data.y=LPButterworth(opt_origin_data.pixel_flow_y_integral,&Buffer_OpticalFlow[1],&OpticalFlow_Parameter);
//实际位移
opt_data.qual=opt_origin_data.qual;
opt_gyro_data.x=(opt_filter_data.x)/200.0f;//光流角速度rad/s
opt_gyro_data.y=(opt_filter_data.y)/200.0f;//光流角速度rad/s
gyro_filter_data.x=LPButterworth(Roll_Gyro,&Buffer_OpticalFlow_Gyro[0],&OpticalFlow_Gyro_Parameter)/57.3f;//陀螺仪相位同步角速度
gyro_filter_data.y=LPButterworth(Pitch_Gyro,&Buffer_OpticalFlow_Gyro[1],&OpticalFlow_Gyro_Parameter)/57.3f;//陀螺仪相位同步角速度
opt_gyro_filter_data.x=OpticalFlow_Rotate_Complementary_Filter(opt_gyro_data.x,gyro_filter_data.x,'x');//使用陀螺仪角速度对光流进行旋转补偿
opt_gyro_filter_data.y=OpticalFlow_Rotate_Complementary_Filter(opt_gyro_data.y,gyro_filter_data.y,'y'); //使用陀螺仪角速度对光流进行旋转补偿

















 965
965

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









