






JVS物联网驱动的管理
整体说明
在物联网场景中,驱动是指用于终端设备数据采集、功能控制的软件程序,它充当了数字空间(IT系统)和物理空间(设备)之间的具体操作的方式。
那么终端设备要连接进入物联网的网络中,那么驱动是设备和平台之间的通信协议和操作的方式,驱动程序部署安装在驱动网关上,驱动网关程序(提前安装部署)会根据平台的 设置,自动把驱动程序包文件 从平台下载到边缘侧,然后把驱动进程启动起来。
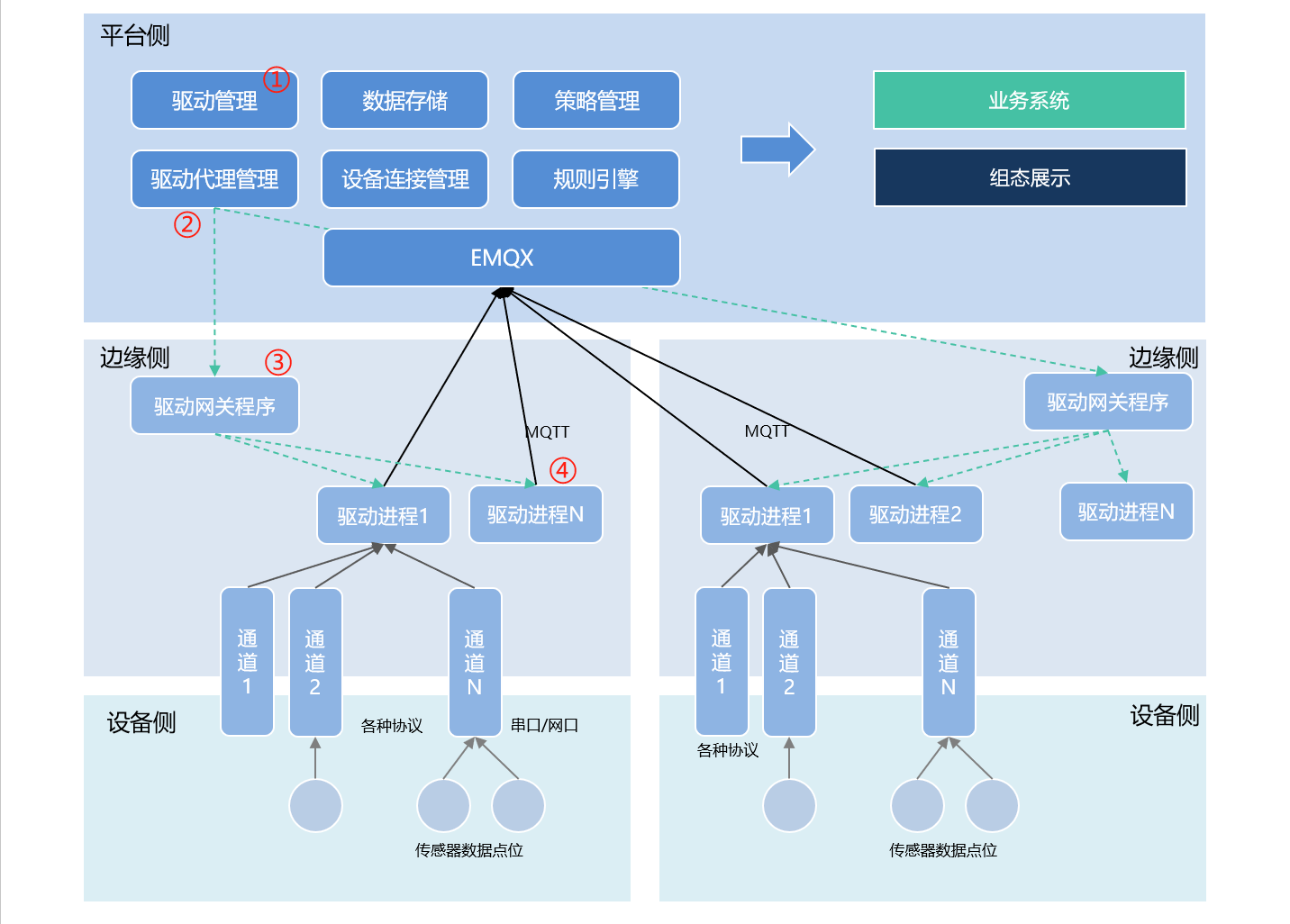
①:驱动文件的管理,驱动文件是驱动程序在平台上的最终呈现,在界面上上传驱动文件,系统会对驱动文件进行解析。
②:驱动网关的管理程序会根据 根据 成功安装的 网关程序 自动找到对应的 网关配置;
③:系统根据配置的通道信息,自动下发相关的驱动程序
④:驱动网关程序将驱动进程启动起来,从而实现底层的设备的接入
驱动的作用
驱动是设备接入到物联网平台的功能实现程序,按照设备的交互协议,实现对设备数据的获取、和对设备的操作,整个程序称之为驱动,驱动是解决物理设备到数据系统之间的交互程序。
驱动文件上传
在jvs物联网平台中,驱动程序包上传的界面如下图所示:
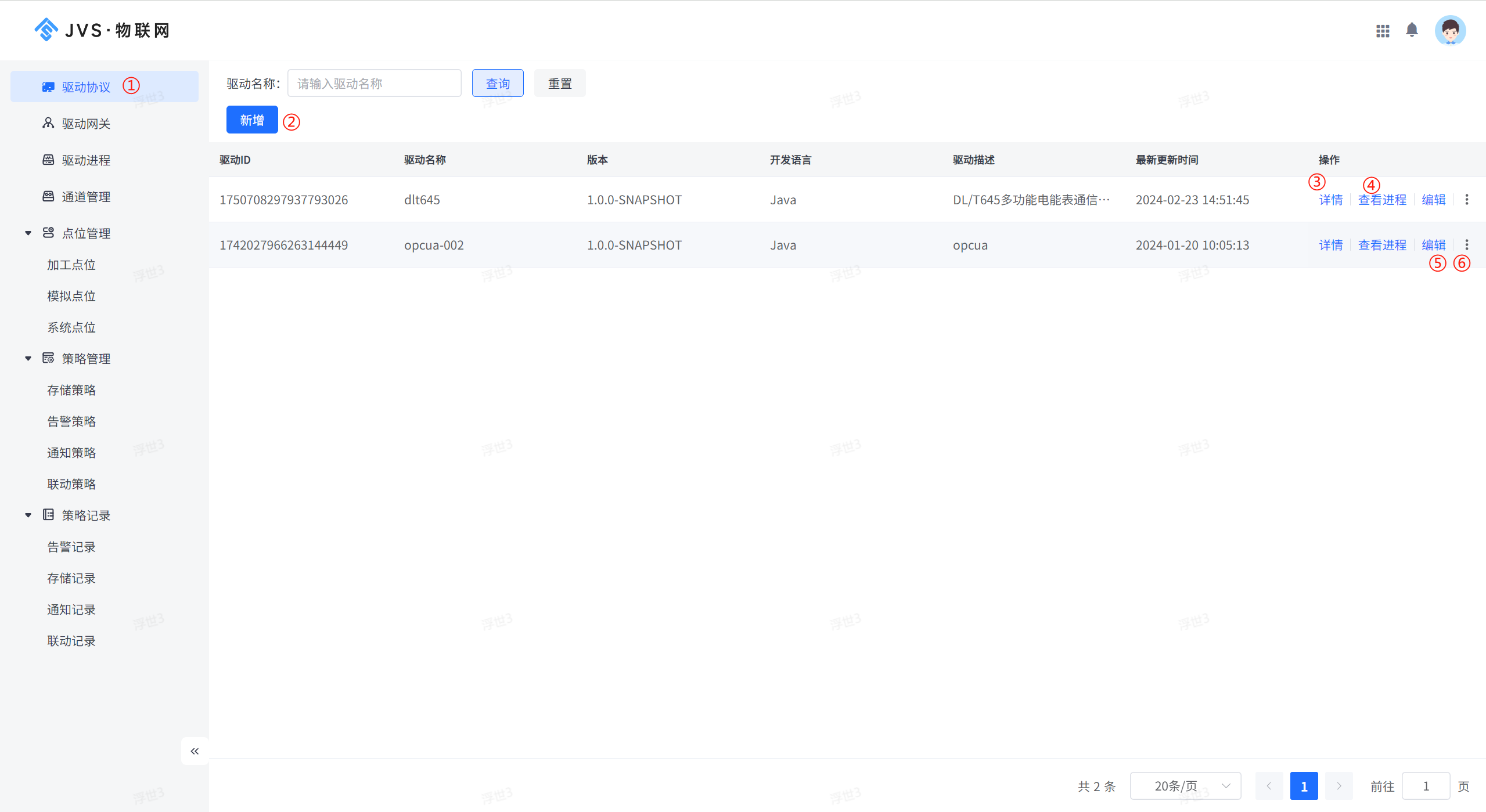
①:驱动管理的菜单入口
②:新增驱动的按钮
③:驱动的详细信息
④:查看驱动相关的进程
⑤:对已经上传的驱动包的编辑
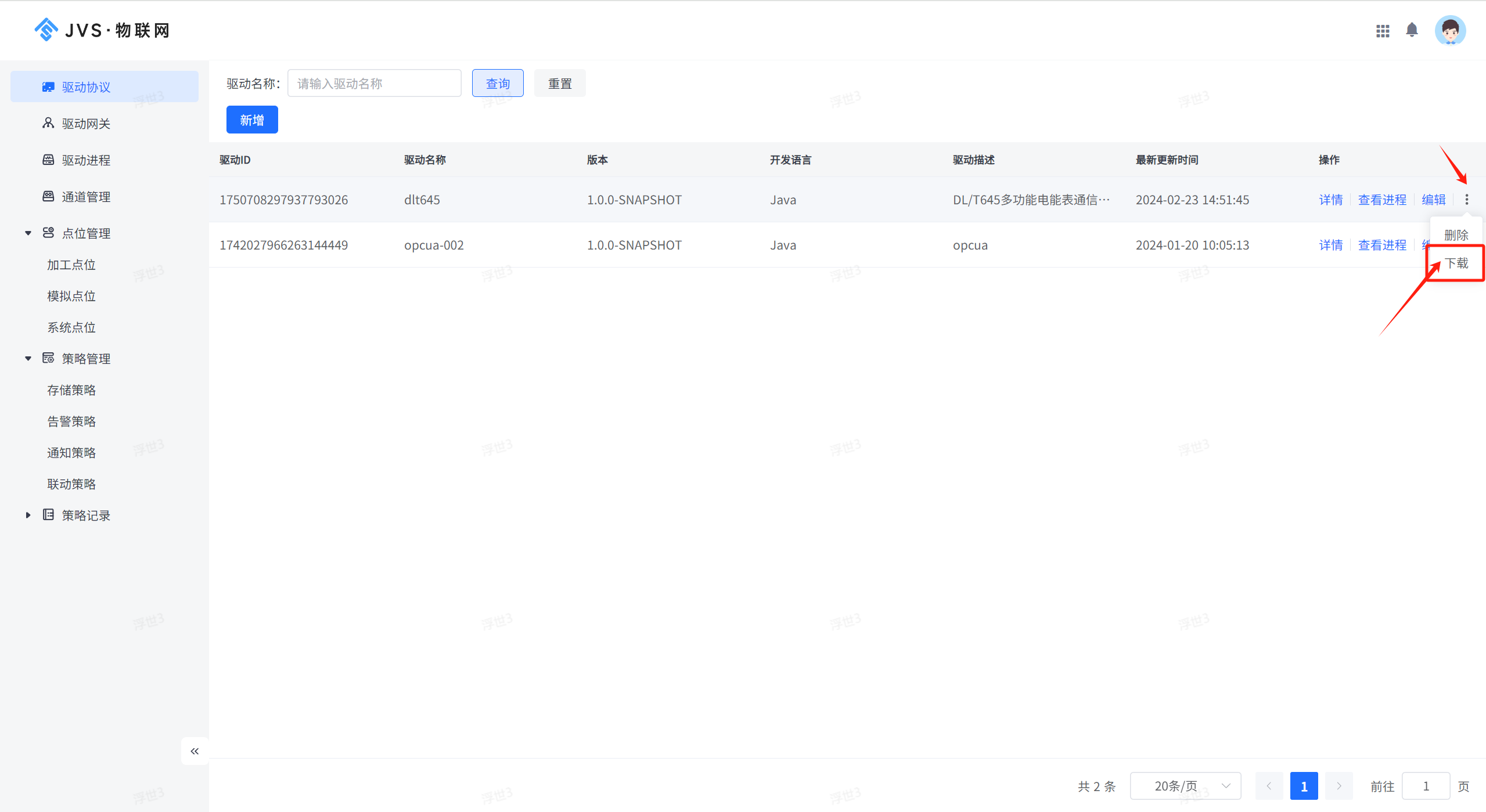
⑥:驱动文件的删除与下载
点击驱动的新增按钮,弹出驱动新增表单,功能如下图所示:

①:驱动文件的上传操作按钮,驱动文件上限50M以内
②:系统对驱动设定的上限配置,单一驱动程序可以创建20个进程,每个驱动可以创建100个采集通道,每个通道可以创建5000个采集点位
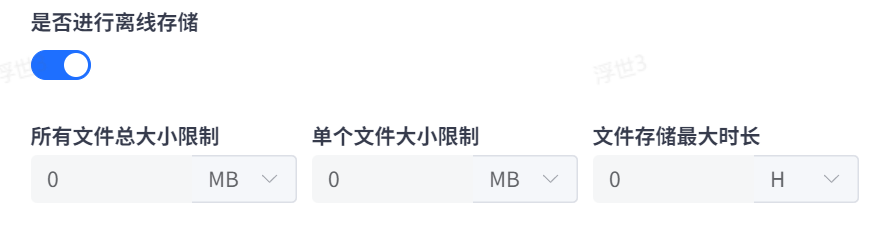
③:离线存储的开关,开启后,会设置离线存储的相关限制配置【存储空间大小、单文件大小、文件存储的时长限制等】
④:传输压缩的开关,开启后,系统会自动实现对数据的压缩,系统在进行边缘端到平台的数据传输时应该采用数据压缩算法【 GIZP压缩算法(jdk8内置)+Msgpack编解码算法(jackson-dataformat-msgpack0.9.6版本)】,会将上传的json数据转化为byte字节。数据压缩的好处是可以减少对网络流量的消耗,但是坏处会增加平台性能的消耗。
驱动详情
点击驱动列表中行级按钮,系统弹出详情表单,如下图所示:
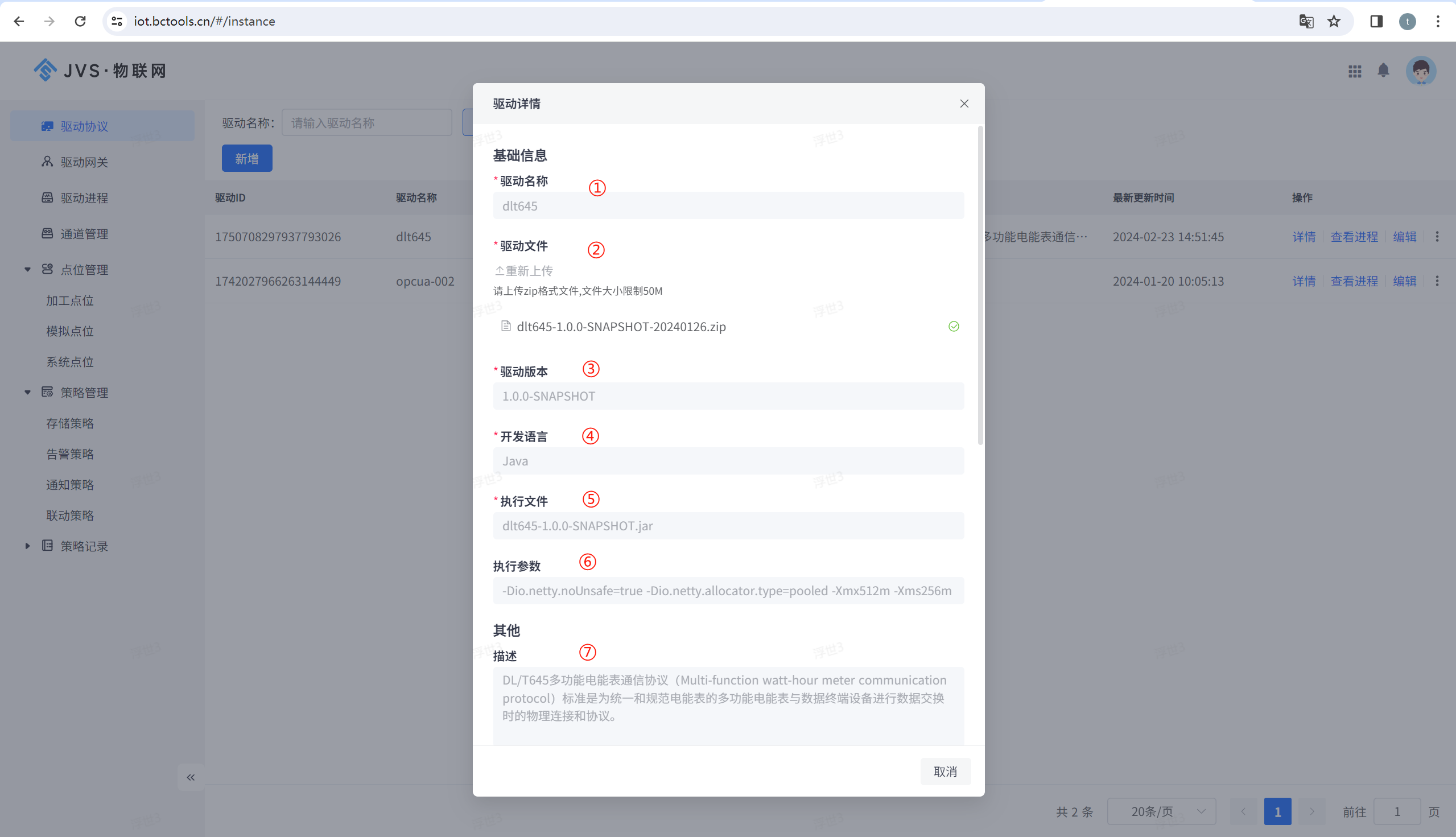
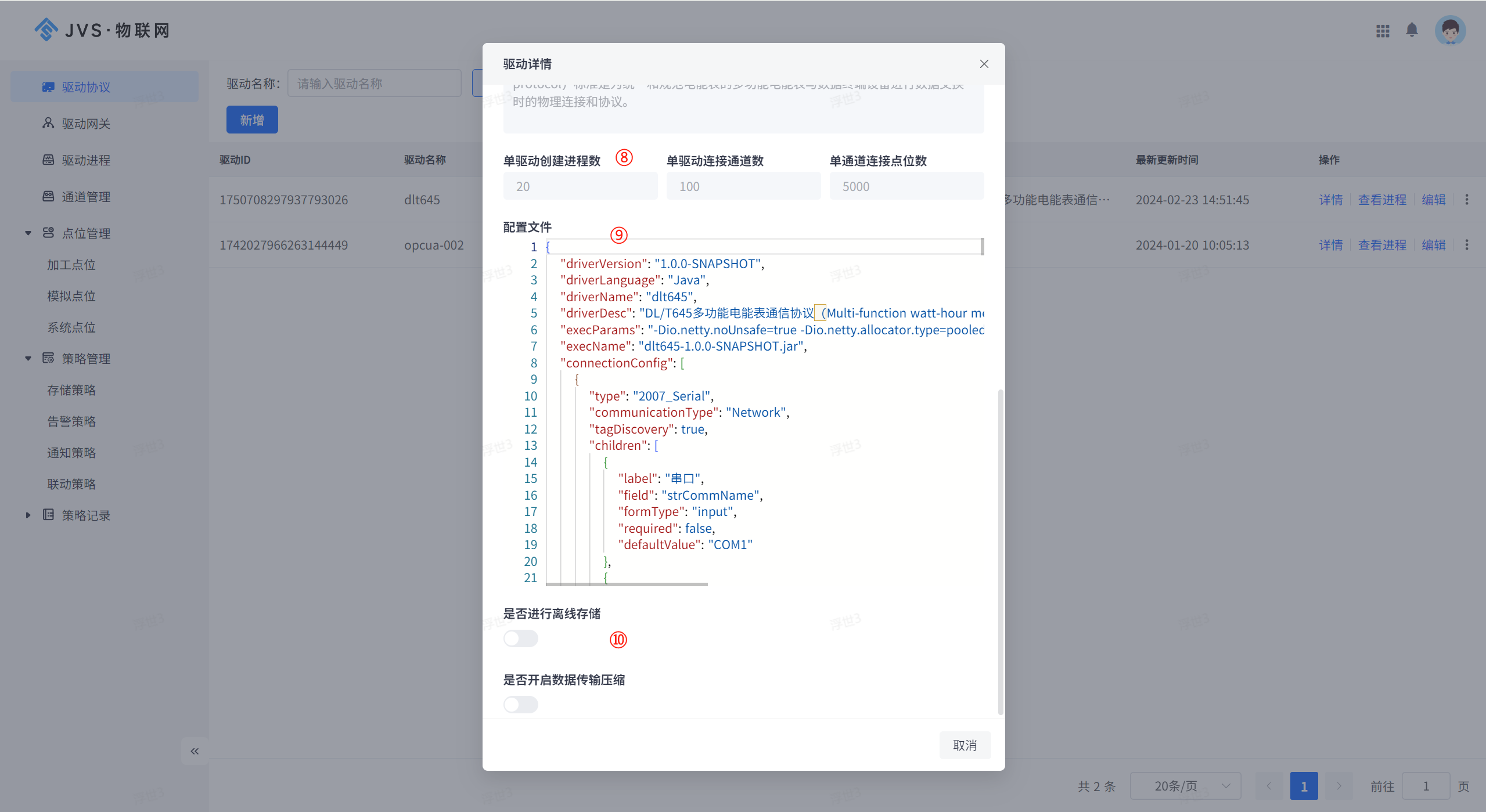
①:驱动名称描述
②:驱动文件包的文件名
③:驱动版本信息,从驱动文件中解析数据得到
④:驱动文件中解析得到数据,目前驱动包支持:Java、Golang、C
⑤:从驱动文件中解析得到可执行文件
⑥:从驱动文件中解析得到,为系统内部所需要的参数
⑦:描述内容
⑧:驱动限制,单驱动限制实例数默认20(范围1-50),单驱动链接通道数默认100(范围1-250),单通道连接点位数5000(范围1-20000)
⑨:配置文件的json展示
⑩:离线存储于数据传输压缩的配置选项
驱动程序的自动下发
如果驱动程序在平台上有更新版本,在通道启动的时候 ,系统自动更新新版本的驱动程序,如果没有新版本的驱动程序,那么直接启动
驱动程序的下载
下载驱动包文件到本地,文件名称和驱动上传时的文件保持一致。
驱动程序查看进程
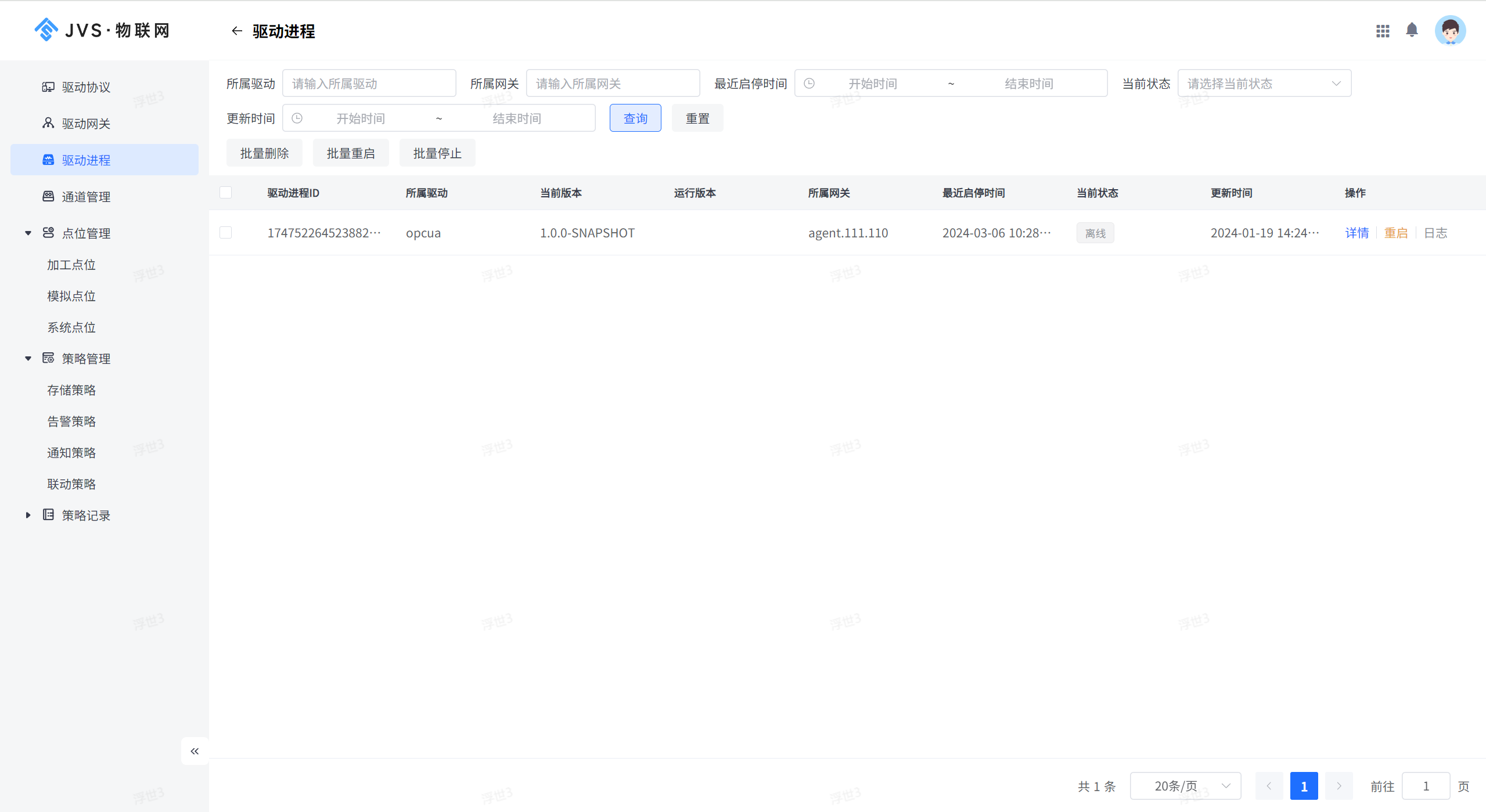
采用了本驱动文件的驱动进程的关联查看,跳转驱动实例列表,并自动跟据驱动ID过滤展示过滤后的驱动实例列表
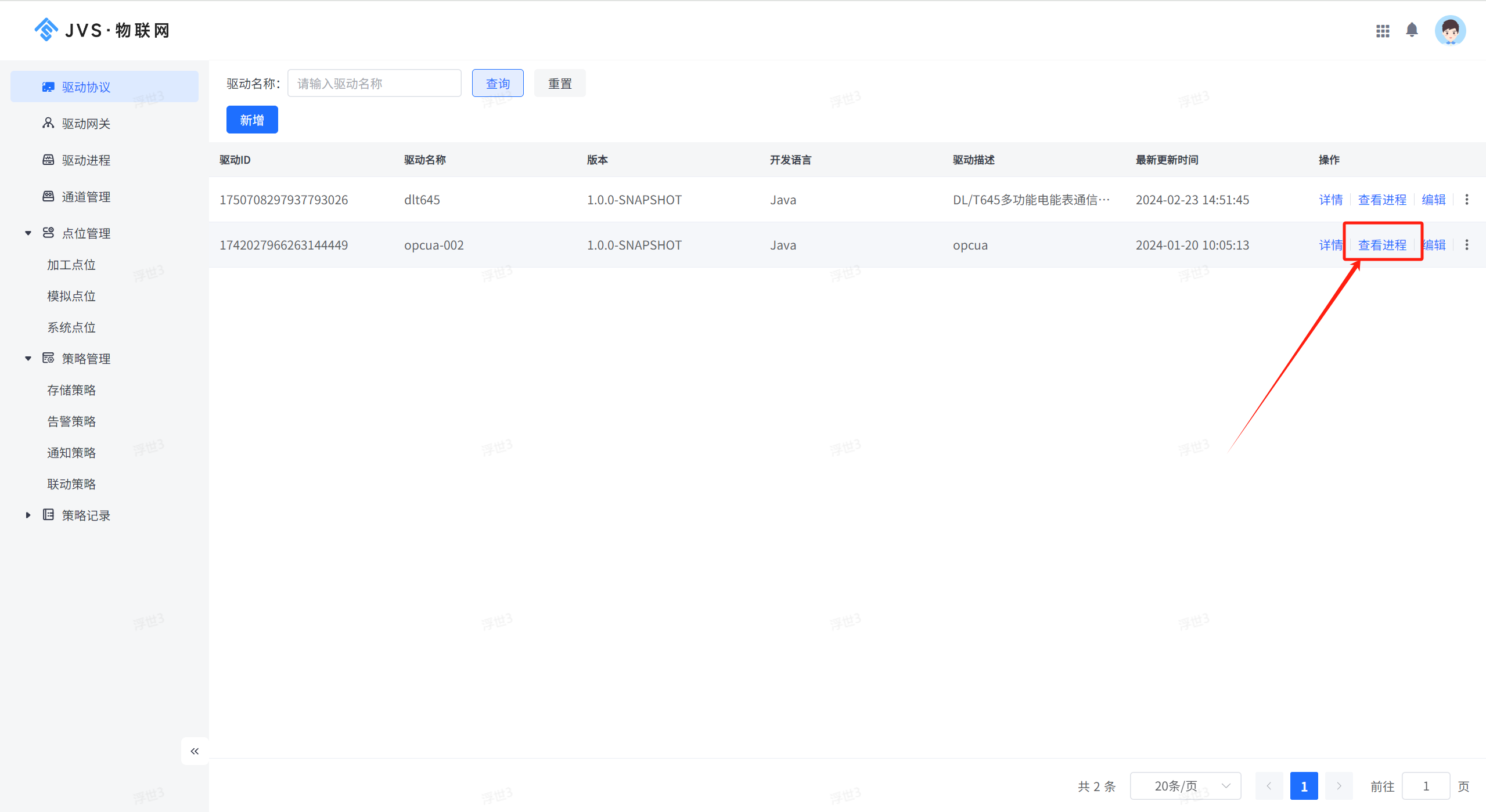
跳转的驱动进程页面:
在线demo:http://iot.bctools.cn/
















 821
821

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











