






风格转化是一个很流行的app应用,虽然现在过去风头了,但是自己实现一下也是好的。paper需要自己去解读,下面是图解。

中间是一个空白图片或者噪音图片。然后将空白图片和S表示style、C表示content进行最小损失函数,但是这样训练和验证会加大时间,测试太慢。然后使用如下的网络:
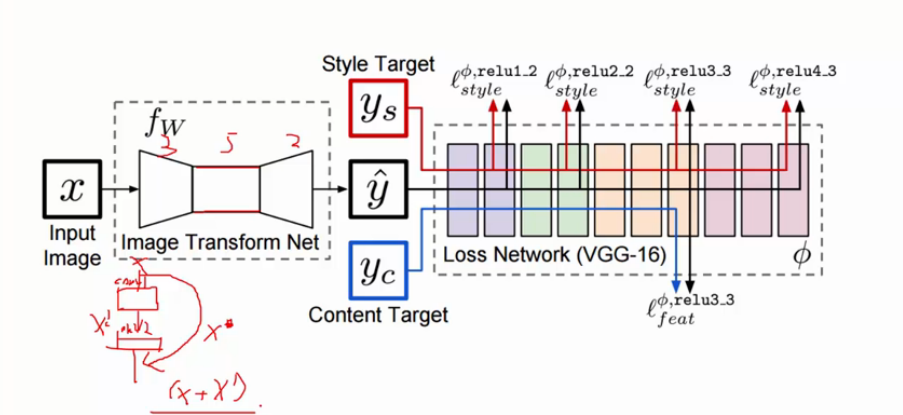
将网络分成左边Image Transform Net和右侧的Loss Network,左面生成图像的转换,右面进行损失函数的计算,每个特征值的对比。其中,左边的先进性下采样,中间是残差网络,最后上采样是反卷积。其中x和yc是一个。
其中style.py文件如下:
from __future__ import print_function
import sys, os, pdb
sys.path.insert(0, 'src')
import numpy as np, scipy.misc
from optimize import optimize
from argparse import ArgumentParser
from utils import save_img, get_img, exists, list_files
import evaluate
CONTENT_WEIGHT = 7.5e0
STYLE_WEIGHT = 1e2
TV_WEIGHT = 2e2
LEARNING_RATE = 1e-3
NUM_EPOCHS = 2
CHECKPOINT_DIR = 'checkpoints'
CHECKPOINT_ITERATIONS = 2000
VGG_PATH = 'data/imagenet-vgg-verydeep-19.mat'
TRAIN_PATH = 'data/train2014'
BATCH_SIZE = 4
DEVICE = '/gpu:0'
FRAC_GPU = 1
def build_parser():
parser = ArgumentParser()
parser.add_argument('--checkpoint-dir', type=str,
dest='checkpoint_dir', help='dir to save checkpoint in',
metavar='CHECKPOINT_DIR', required=True)
parser.add_argument('--style', type=str,
dest='style', help='style image path',
metavar='STYLE', required=True)
parser.add_argument('--train-path', type=str,
dest='train_path', help='path to training images folder',
metavar='TRAIN_PATH', default=TRAIN_PATH)
parser.add_argument('--test', type=str,
dest='test', help='test image path',
metavar='TEST', default=False)
parser.add_argument('--test-dir', type=str,
dest='test_dir', help='test image save dir',
metavar='TEST_DIR', default=False)
parser.add_argument('--slow', dest='slow', action='store_true',
help='gatys\' approach (for debugging, not supported)',
default=False)
parser.add_argument('--epochs', type=int,
dest='epochs', help='num epochs',
metavar='EPOCHS', default=NUM_EPOCHS)
parser.add_argument('--batch-size', type=int,
dest='batch_size', help='batch size',
metavar='BATCH_SIZE', default=BATCH_SIZE)
parser.add_argument('--checkpoint-iterations', type=int,
dest='checkpoint_iterations', help='checkpoint frequency',
metavar='CHECKPOINT_ITERATIONS',
default=CHECKPOINT_ITERATIONS)
parser.add_argument('--vgg-path', type=str,
dest='vgg_path',
help='path to VGG19 network (default %(default)s)',
metavar='VGG_PATH', default=VGG_PATH)
parser.add_argument('--content-weight', type=float,
dest='content_weight',
help='content weight (default %(default)s)',
metavar='CONTENT_WEIGHT', default=CONTENT_WEIGHT)
parser.add_argument('--style-weight', type=float,
dest='style_weight',
help='style weight (default %(default)s)',
metavar='STYLE_WEIGHT', default=STYLE_WEIGHT)
parser.add_argument('--tv-weight', type=float,
dest='tv_weight',
help='total variation regularization weight (default %(default)s)',
metavar='TV_WEIGHT', default=TV_WEIGHT)
parser.add_argument('--learning-rate', type=float,
dest='learning_rate',
help='learning rate (default %(default)s)',
metavar='LEARNING_RATE', default=LEARNING_RATE)
return parser
def check_opts(opts):
exists(opts.checkpoint_dir, "checkpoint dir not found!")
exists(opts.style, "style path not found!")
exists(opts.train_path, "train path not found!")
if opts.test or opts.test_dir:
exists(opts.test, "test img not found!")
exists(opts.test_dir, "test directory not found!")
exists(opts.vgg_path, "vgg network data not found!")
assert opts.epochs > 0
assert opts.batch_size > 0
assert opts.checkpoint_iterations > 0
assert os.path.exists(opts.vgg_path)
assert opts.content_weight >= 0
assert opts.style_weight >= 0
assert opts.tv_weight >= 0
assert opts.learning_rate >= 0
def _get_files(img_dir):
files = list_files(img_dir)
return [os.path.join(img_dir,x) for x in files]
def main():
parser = build_parser()
options = parser.parse_args()
check_opts(options)
style_target = get_img(options.style)
if not options.slow:
content_targets = _get_files(options.train_path)
elif options.test:
content_targets = [options.test]
kwargs = {
"slow":options.slow,
"epochs":options.epochs,
"print_iterations":options.checkpoint_iterations,
"batch_size":options.batch_size,
"save_path":os.path.join(options.checkpoint_dir,'fns.ckpt'),
"learning_rate":options.learning_rate
}
if options.slow:
if options.epochs < 10:
kwargs['epochs'] = 1000
if options.learning_rate < 1:
kwargs['learning_rate'] = 1e1
args = [
content_targets,
style_target,
options.content_weight,
options.style_weight,
options.tv_weight,
options.vgg_path
]
for preds, losses, i, epoch in optimize(*args, **kwargs):
style_loss, content_loss, tv_loss, loss = losses
print('Epoch %d, Iteration: %d, Loss: %s' % (epoch, i, loss))
to_print = (style_loss, content_loss, tv_loss)
print('style: %s, content:%s, tv: %s' % to_print)
if options.test:
assert options.test_dir != False
preds_path = '%s/%s_%s.png' % (options.test_dir,epoch,i)
if not options.slow:
ckpt_dir = os.path.dirname(options.checkpoint_dir)
evaluate.ffwd_to_img(options.test,preds_path,
options.checkpoint_dir)
else:
save_img(preds_path, img)
ckpt_dir = options.checkpoint_dir
cmd_text = 'python evaluate.py --checkpoint %s ...' % ckpt_dir
print("Training complete. For evaluation:\n `%s`" % cmd_text)
if __name__ == '__main__':
main()
下面是utils.py工具类的使用:
在里面实现获取图片,缩放图片,保存图片等操作
import scipy.misc, numpy as np, os, sys
def save_img(out_path, img):
img = np.clip(img, 0, 255).astype(np.uint8)
scipy.misc.imsave(out_path, img)
def scale_img(style_path, style_scale):
scale = float(style_scale)
o0, o1, o2 = scipy.misc.imread(style_path, mode='RGB').shape
scale = float(style_scale)
new_shape = (int(o0 * scale), int(o1 * scale), o2)
style_target = _get_img(style_path, img_size=new_shape)
return style_target
def get_img(src, img_size=False):
img = scipy.misc.imread(src, mode='RGB') # misc.imresize(, (256, 256, 3))
if not (len(img.shape) == 3 and img.shape[2] == 3):
img = np.dstack((img,img,img))
print (img.shape)
if img_size != False:
img = scipy.misc.imresize(img, img_size)
return img
def exists(p, msg):
assert os.path.exists(p), msg
def list_files(in_path):
files = []
for (dirpath, dirnames, filenames) in os.walk(in_path):
files.extend(filenames)
break
return files
下面是模型优化的函数,最为重要的函数optimize.py
from __future__ import print_function
import functools
import vgg, pdb, time
import tensorflow as tf, numpy as np, os
import transform
from utils import get_img
STYLE_LAYERS = ('relu1_1', 'relu2_1', 'relu3_1', 'relu4_1', 'relu5_1')
CONTENT_LAYER = 'relu4_2'
DEVICES = 'CUDA_VISIBLE_DEVICES'
# np arr, np arr
def optimize(content_targets, style_target, content_weight, style_weight,
tv_weight, vgg_path, epochs=2, print_iterations=1000,
batch_size=4, save_path='saver/fns.ckpt', slow=False,
learning_rate=1e-3, debug=False):
if slow:
batch_size = 1
mod = len(content_targets) % batch_size
if mod > 0:
print("Train set has been trimmed slightly..")
content_targets = content_targets[:-mod]
style_features = {}
batch_shape = (batch_size,256,256,3)
style_shape = (1,) + style_target.shape
#print(style_shape)
# precompute style features
with tf.Graph().as_default(), tf.device('/cpu:0'), tf.Session() as sess:
style_image = tf.placeholder(tf.float32, shape=style_shape, name='style_image')
style_image_pre = vgg.preprocess(style_image)
net = vgg.net(vgg_path, style_image_pre)
style_pre = np.array([style_target])
for layer in STYLE_LAYERS:
features = net[layer].eval(feed_dict={style_image:style_pre})
features = np.reshape(features, (-1, features.shape[3]))
#print (features.shape)
gram = np.matmul(features.T, features) / features.size
style_features[layer] = gram
with tf.Graph().as_default(), tf.Session() as sess:
X_content = tf.placeholder(tf.float32, shape=batch_shape, name="X_content")
X_pre = vgg.preprocess(X_content)
# precompute content features
content_features = {}
content_net = vgg.net(vgg_path, X_pre)
content_features[CONTENT_LAYER] = content_net[CONTENT_LAYER]
if slow:
preds = tf.Variable(
tf.random_normal(X_content.get_shape()) * 0.256
)
preds_pre = preds
else:
preds = transform.net(X_content/255.0)
preds_pre = vgg.preprocess(preds)
net = vgg.net(vgg_path, preds_pre)
content_size = _tensor_size(content_features[CONTENT_LAYER])*batch_size
assert _tensor_size(content_features[CONTENT_LAYER]) == _tensor_size(net[CONTENT_LAYER])
content_loss = content_weight * (2 * tf.nn.l2_loss(
net[CONTENT_LAYER] - content_features[CONTENT_LAYER]) / content_size
)
style_losses = []
for style_layer in STYLE_LAYERS:
layer = net[style_layer]
bs, height, width, filters = map(lambda i:i.value,layer.get_shape())
size = height * width * filters
feats = tf.reshape(layer, (bs, height * width, filters))
feats_T = tf.transpose(feats, perm=[0,2,1])
grams = tf.matmul(feats_T, feats) / size
style_gram = style_features[style_layer]
style_losses.append(2 * tf.nn.l2_loss(grams - style_gram)/style_gram.size)
style_loss = style_weight * functools.reduce(tf.add, style_losses) / batch_size
# total variation denoising
tv_y_size = _tensor_size(preds[:,1:,:,:])
tv_x_size = _tensor_size(preds[:,:,1:,:])
y_tv = tf.nn.l2_loss(preds[:,1:,:,:] - preds[:,:batch_shape[1]-1,:,:])
x_tv = tf.nn.l2_loss(preds[:,:,1:,:] - preds[:,:,:batch_shape[2]-1,:])
tv_loss = tv_weight*2*(x_tv/tv_x_size + y_tv/tv_y_size)/batch_size
loss = content_loss + style_loss + tv_loss
# overall loss
train_step = tf.train.AdamOptimizer(learning_rate).minimize(loss)
sess.run(tf.global_variables_initializer())
import random
uid = random.randint(1, 100)
print("UID: %s" % uid)
for epoch in range(epochs):
num_examples = len(content_targets)
iterations = 0
while iterations * batch_size < num_examples:
start_time = time.time()
curr = iterations * batch_size
step = curr + batch_size
X_batch = np.zeros(batch_shape, dtype=np.float32)
for j, img_p in enumerate(content_targets[curr:step]):
X_batch[j] = get_img(img_p, (256,256,3)).astype(np.float32)
iterations += 1
assert X_batch.shape[0] == batch_size
feed_dict = {
X_content:X_batch
}
train_step.run(feed_dict=feed_dict)
end_time = time.time()
delta_time = end_time - start_time
if debug:
print("UID: %s, batch time: %s" % (uid, delta_time))
is_print_iter = int(iterations) % print_iterations == 0
if slow:
is_print_iter = epoch % print_iterations == 0
is_last = epoch == epochs - 1 and iterations * batch_size >= num_examples
should_print = is_print_iter or is_last
if should_print:
to_get = [style_loss, content_loss, tv_loss, loss, preds]
test_feed_dict = {
X_content:X_batch
}
tup = sess.run(to_get, feed_dict = test_feed_dict)
_style_loss,_content_loss,_tv_loss,_loss,_preds = tup
losses = (_style_loss, _content_loss, _tv_loss, _loss)
if slow:
_preds = vgg.unprocess(_preds)
else:
saver = tf.train.Saver()
res = saver.save(sess, save_path)
yield(_preds, losses, iterations, epoch)
def _tensor_size(tensor):
from operator import mul
return functools.reduce(mul, (d.value for d in tensor.get_shape()[1:]), 1)
下面是vgg.py
import tensorflow as tf
import numpy as np
import scipy.io
import pdb
MEAN_PIXEL = np.array([ 123.68 , 116.779, 103.939])
def net(data_path, input_image):
layers = (
'conv1_1', 'relu1_1', 'conv1_2', 'relu1_2', 'pool1',
'conv2_1', 'relu2_1', 'conv2_2', 'relu2_2', 'pool2',
'conv3_1', 'relu3_1', 'conv3_2', 'relu3_2', 'conv3_3',
'relu3_3', 'conv3_4', 'relu3_4', 'pool3',
'conv4_1', 'relu4_1', 'conv4_2', 'relu4_2', 'conv4_3',
'relu4_3', 'conv4_4', 'relu4_4', 'pool4',
'conv5_1', 'relu5_1', 'conv5_2', 'relu5_2', 'conv5_3',
'relu5_3', 'conv5_4', 'relu5_4'
)
data = scipy.io.loadmat(data_path)
mean = data['normalization'][0][0][0]
mean_pixel = np.mean(mean, axis=(0, 1))
weights = data['layers'][0]
net = {}
current = input_image
for i, name in enumerate(layers):
kind = name[:4]
if kind == 'conv':
kernels, bias = weights[i][0][0][0][0]
# matconvnet: weights are [width, height, in_channels, out_channels]
# tensorflow: weights are [height, width, in_channels, out_channels]
kernels = np.transpose(kernels, (1, 0, 2, 3))
bias = bias.reshape(-1)
current = _conv_layer(current, kernels, bias)
elif kind == 'relu':
current = tf.nn.relu(current)
elif kind == 'pool':
current = _pool_layer(current)
net[name] = current
assert len(net) == len(layers)
return net
def _conv_layer(input, weights, bias):
conv = tf.nn.conv2d(input, tf.constant(weights), strides=(1, 1, 1, 1),
padding='SAME')
return tf.nn.bias_add(conv, bias)
def _pool_layer(input):
return tf.nn.max_pool(input, ksize=(1, 2, 2, 1), strides=(1, 2, 2, 1),
padding='SAME')
def preprocess(image):
return image - MEAN_PIXEL
def unprocess(image):
return image + MEAN_PIXEL
然后就是transform.py的转换网络,即生成网络:
import tensorflow as tf, pdb
WEIGHTS_INIT_STDEV = .1
def net(image):
conv1 = _conv_layer(image, 32, 9, 1)
conv2 = _conv_layer(conv1, 64, 3, 2)
conv3 = _conv_layer(conv2, 128, 3, 2)
resid1 = _residual_block(conv3, 3)
resid2 = _residual_block(resid1, 3)
resid3 = _residual_block(resid2, 3)
resid4 = _residual_block(resid3, 3)
resid5 = _residual_block(resid4, 3)
conv_t1 = _conv_tranpose_layer(resid5, 64, 3, 2)
conv_t2 = _conv_tranpose_layer(conv_t1, 32, 3, 2)
conv_t3 = _conv_layer(conv_t2, 3, 9, 1, relu=False)
preds = tf.nn.tanh(conv_t3) * 150 + 255./2
return preds
def _conv_layer(net, num_filters, filter_size, strides, relu=True):
weights_init = _conv_init_vars(net, num_filters, filter_size)
strides_shape = [1, strides, strides, 1]
net = tf.nn.conv2d(net, weights_init, strides_shape, padding='SAME')
net = _instance_norm(net)
if relu:
net = tf.nn.relu(net)
return net
def _conv_tranpose_layer(net, num_filters, filter_size, strides):
weights_init = _conv_init_vars(net, num_filters, filter_size, transpose=True)
batch_size, rows, cols, in_channels = [i.value for i in net.get_shape()]
new_rows, new_cols = int(rows * strides), int(cols * strides)
# new_shape = #tf.pack([tf.shape(net)[0], new_rows, new_cols, num_filters])
new_shape = [batch_size, new_rows, new_cols, num_filters]
tf_shape = tf.stack(new_shape)
strides_shape = [1,strides,strides,1]
net = tf.nn.conv2d_transpose(net, weights_init, tf_shape, strides_shape, padding='SAME')
net = _instance_norm(net)
return tf.nn.relu(net)
def _residual_block(net, filter_size=3):
tmp = _conv_layer(net, 128, filter_size, 1)
return net + _conv_layer(tmp, 128, filter_size, 1, relu=False)
def _instance_norm(net, train=True):
batch, rows, cols, channels = [i.value for i in net.get_shape()]
var_shape = [channels]
mu, sigma_sq = tf.nn.moments(net, [1,2], keep_dims=True)
shift = tf.Variable(tf.zeros(var_shape))
scale = tf.Variable(tf.ones(var_shape))
epsilon = 1e-3
normalized = (net-mu)/(sigma_sq + epsilon)**(.5)
return scale * normalized + shift
def _conv_init_vars(net, out_channels, filter_size, transpose=False):
_, rows, cols, in_channels = [i.value for i in net.get_shape()]
if not transpose:
weights_shape = [filter_size, filter_size, in_channels, out_channels]
else:
weights_shape = [filter_size, filter_size, out_channels, in_channels]
weights_init = tf.Variable(tf.truncated_normal(weights_shape, stddev=WEIGHTS_INIT_STDEV, seed=1), dtype=tf.float32)
return weights_init















 1036
1036

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









