







stm32驱动DHT11采集温湿度
一、DHT11温湿度传感器工作原理
1.单总线通信
2.DHT11工作过程:
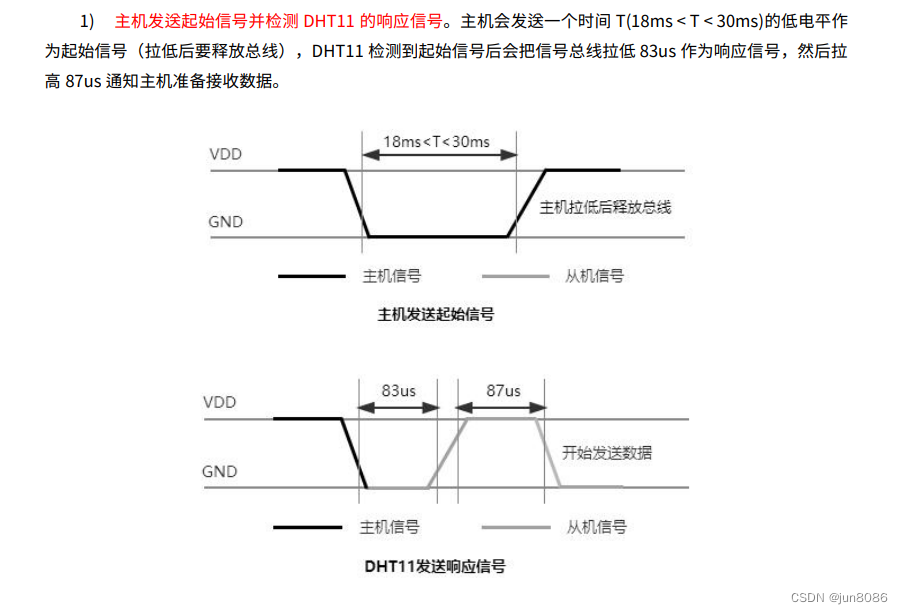
(1)查看总线上是否存在DHT11设备以及DHT11的响应;
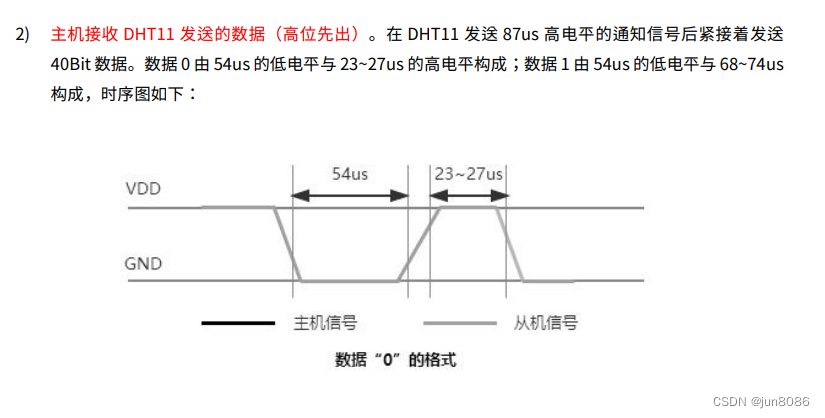
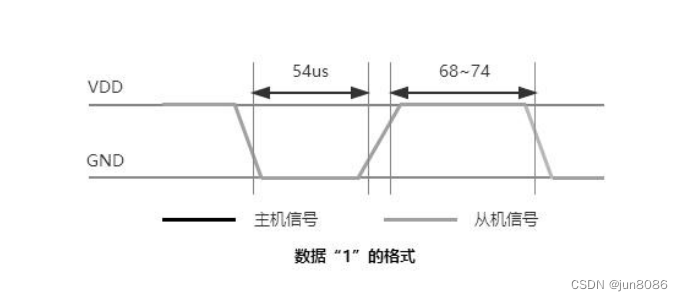
(2)DHT11发送数据
这个单总线数据的传输,类似下面的过程:
<确定传输是否可行>
老板问你:小D你在不在?(主机拉低30ms)
小 D: 老板我在?(拉低83us)
小 D: 老板收消息!(拉高87us)
<开始传输消息>
小D:传个0。 (先拉低54us,再拉高27us)
小D:再传个1哦~(先拉低54us,在拉高74us)
二、DHT11传感器驱动程序
- 以下两个文件是DHT11的驱动,需要后面的2、3、4步骤把它驱动起来;
//文件名:dht11.c
#include "dht11.h"
/*
tim2delay.h 使用定时做的延时函数的头文件,
可以查看博客:stm32使用定时器精确延时
*/
#include "tim2delay.h"
#define delay_ms Tim2Delayms
#define delay_us Tim2Delayus
//复位DHT11
void DHT11_Rst(void)
{
DHT11_IO_OUT(GPIO_PIN_SET); //SET OUTPUT
DHT11_DQ_OUT=0; //拉低DQ
delay_ms(20); //拉低至少18ms
DHT11_DQ_OUT=1; //DQ=1
delay_us(30); //主机拉高20~40us
}
//等待DHT11的回应
//返回1:未检测到DHT11的存在
//返回0:存在
u8 DHT11_Check(void)
{
u8 retry=0;
DHT11_IO_IN();//SET INPUT
while (DHT11_DQ_IN&&retry<100)//DHT11会拉低40~80us
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
else retry=0;
while (!DHT11_DQ_IN&&retry<100)//DHT11拉低后会再次拉高40~80us
{
retry++;
delay_us(1);
};
if(retry>=100)return 1;
return 0;
}
//从DHT11读取一个位
//返回值:1/0
u8 DHT11_Read_Bit(void)
{
u8 retry=0;
while(DHT11_DQ_IN&&retry<100)//等待变为低电平
{
retry++;
delay_us(1);
}
retry=0;
while(!DHT11_DQ_IN&&retry<100)//等待变高电平
{
retry++;
delay_us(1);
}
delay_us(40);//等待40us
if(DHT11_DQ_IN)return 1;
else return 0;
}
//从DHT11读取一个字节
//返回值:读到的数据
u8 DHT11_Read_Byte(void)
{
u8 i,dat;
dat=0;
for (i=0;i<8;i++)
{
dat<<=1;
dat|=DHT11_Read_Bit();
}
return dat;
}
//从DHT11读取一次数据
//temp:温度值(范围:0~50°)
//humi:湿度值(范围:20%~90%)
//返回值:0,正常;1,读取失败
u8 DHT11_Read_Data(u8 *temp,u8 *humi)
{
u8 buf[5];
u8 i;
DHT11_Rst();
if(DHT11_Check()==0)
{
for(i=0;i<5;i++)//读取40位数据
{
buf[i]=DHT11_Read_Byte();
}
if((buf[0]+buf[1]+buf[2]+buf[3])==buf[4])
{
*humi=buf[0];
*temp=buf[2];
}
}else return 1;
return 0;
}
//初始化DHT11的IO口 DQ 同时检测DHT11的存在
//返回1:不存在
//返回0:存在
u8 DHT11_Init(void)
{
GPIO_init_output(GPIO_PIN_SET);//初始化PB12
DHT11_Rst(); //复位DHT11
return DHT11_Check();//等待DHT11的回应
}
//文件名:dht11.h
#ifndef __DHT11_H
#define __DHT11_H
#include "stdint.h"
#include "gpio.h"
//IO方向设置
#define DHT11_IO_IN() {GPIO_init_input();}
#define DHT11_IO_OUT(STATE) {GPIO_init_output(STATE);}//state set gpio 0 or 1
//IO操作函数
#define DHT11_DQ_OUT PAout(8) //数据端口 PA8
#define DHT11_DQ_IN PAin(8) //数据端口 PA8
uint8_t DHT11_Init(void);//初始化DHT11
uint8_t DHT11_Read_Data(uint8_t *temp,uint8_t *humi);//读取温湿度
uint8_t DHT11_Read_Byte(void);//读出一个字节
uint8_t DHT11_Read_Bit(void);//读出一个位
uint8_t DHT11_Check(void);//检测是否存在DHT11
void DHT11_Rst(void);//复位DHT11
#endif
- 因为使用的是一根引脚,但是在使用过程中做主机输出时需要为输出模式,在读取时需要为输入模式,所以宏定义DHT11_IO_IN();DHT11_IO_OUT(STATE);需要我们自己来写
void GPIO_init_input(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*Configure GPIO pin : PA8 */
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/*
函数名:GPIO_init_output(GPIO_PinState state)
功能:设置IO口为输出模式,state是输出高电平还是低电平
*/
void GPIO_init_output(GPIO_PinState state)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/*Configure GPIO pin : PB8 */
GPIO_InitStruct.Pin = GPIO_PIN_8;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_MEDIUM;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, state);
}
- 需要sys.h文件
//文件名:sys.h
#ifndef _SYS_H
#define _SYS_H
#include "stm32f4xx_hal.h"
//0,²»Ö§³Öos
//1,Ö§³Öos
#define SYSTEM_SUPPORT_OS 1 //¶¨ÒåϵͳÎļþ¼ÐÊÇ·ñÖ§³ÖOS
///
//¶¨ÒåһЩ³£ÓõÄÊý¾ÝÀàÐͶ̹ؼü×Ö
typedef int32_t s32;
typedef int16_t s16;
typedef int8_t s8;
typedef const int32_t sc32;
typedef const int16_t sc16;
typedef const int8_t sc8;
typedef __IO int32_t vs32;
typedef __IO int16_t vs16;
typedef __IO int8_t vs8;
typedef __I int32_t vsc32;
typedef __I int16_t vsc16;
typedef __I int8_t vsc8;
typedef uint32_t u32;
typedef uint16_t u16;
typedef uint8_t u8;
typedef const uint32_t uc32;
typedef const uint16_t uc16;
typedef const uint8_t uc8;
typedef __IO uint32_t vu32;
typedef __IO uint16_t vu16;
typedef __IO uint8_t vu8;
typedef __I uint32_t vuc32;
typedef __I uint16_t vuc16;
typedef __I uint8_t vuc8;
//λ´ø²Ù×÷,ʵÏÖ51ÀàËƵÄGPIO¿ØÖƹ¦ÄÜ
//IO¿Ú²Ù×÷ºê¶¨Òå
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO¿ÚµØÖ·Ó³Éä
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOJ_ODR_ADDr (GPIOJ_BASE+20) //0x40022414
#define GPIOK_ODR_ADDr (GPIOK_BASE+20) //0x40022814
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
//IO¿Ú²Ù×÷,Ö»¶Ôµ¥Ò»µÄIO¿Ú!
//È·±£nµÄֵСÓÚ16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //Êä³ö
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //ÊäÈë
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //Êä³ö
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //ÊäÈë
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //Êä³ö
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //ÊäÈë
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //Êä³ö
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //ÊäÈë
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //Êä³ö
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //ÊäÈë
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //Êä³ö
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //ÊäÈë
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //Êä³ö
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //ÊäÈë
#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //Êä³ö
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //ÊäÈë
#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //Êä³ö
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //ÊäÈë
//ÒÔÏÂΪ»ã±àº¯Êý
void WFI_SET(void); //Ö´ÐÐWFIÖ¸Áî
void INTX_DISABLE(void);//¹Ø±ÕËùÓÐÖжÏ
void INTX_ENABLE(void); //¿ªÆôËùÓÐÖжÏ
void MSR_MSP(u32 addr); //ÉèÖöÑÕ»µØÖ·
#endif
4.使用定时器的延时函数,因为在使用过程中与其他模块共用延时函数,导致启动其它模块之后,DHT11就不能正常的输出温湿度数据,所以,最好使用一个独立的定时器来做延时,然后修改下面宏定义就可以了。使用独立的定时器来做精确延时见博客:
三、主函数调用
把下面的函数放在主函数中运行。
void Dht11GetData(void)
{
uint8_t datapost[128];
//strcpy((char *)datapost,"hello world");
int flag = DHT11_Read_Data(&temp,&buf);
if(flag == 0)
{
//printf("T:%d, H:%d\r\n",temp,buf);
dataPacking(datapost,tempture,temp);
uart2DataSend(datapost,sizeof(datapost));
dataPacking(datapost,shidu,buf);
uart2DataSend(datapost,sizeof(datapost));
}
else
{
printf("err:%d\r\n",flag);
}
HAL_Delay(2000);
}

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











