







主机环境:Windows XP SP3
开发环境:MDK 5.20
目标芯片:STM32F030C8T6
前两天在群里看到有人在询问有关STM32 串口总线空闲检测的事情,根据串口总线是否空闲来判断一帧数据是否发送完成,之前使用串口一直没怎么注意过这一串口特性,所以后来特意去看了下手册中有关总线空闲检测的指示,发现它的确是个好特性,之前都只是在串口中断中接收数据在主循环中不断的读取数据然后检测是否是一帧完整的数据,之后再进行后续处理。这样处理有一个不是很好的问题就是在主循环读取串口数据时需要有个超时计数器来避免无串口数据时死等在那里,但如果使用串口总线空闲检测的话,我们就不需要超时计数器了,只需要在检测到串口总线空闲时把收到的数据全部读走,然后检测是否满足一定的格式进而处理,这样是的主循环的时间进一步减少,加速了系统的处理速度。
在STM32F030C8T6的参考手册中串口中断状态寄存器USARTx_ISR中有一个IDLE位来表明是否检测到总线空闲,如下图所示:
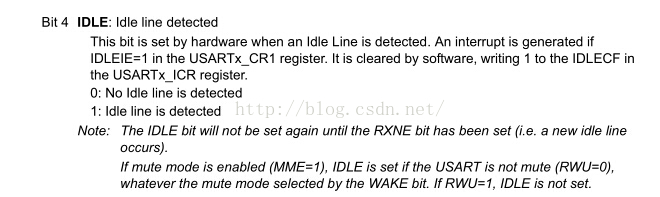
并且给出了如何清除该标识,STM32F1系列芯片清除该标识的方法不同,可根据参考手册来查询,且该标识置位后就不再置位除非RXNE位再次置位,如果上位机一次性发送了1个字节数据则RXNE置位1次,IDLE置位1次,而如果上位机一次性发送了6个字节数据,则RXNE置位6次,IDLE依然置位1次,只要在CR1寄存器中使能了串口总线空闲检测就可以使用该特性了,使用标准库编辑了一下测试代码,uart头文件如下
#ifndef __UART_H__
#define __UART_H__
#include <stdint.h>
#include "stm32f0xx.h"
#include <stdio.h>
#define USARTx USART1
#define USARTx_GPIO_PORT GPIOA
#define USARTx_GPIO_CLK RCC_AHBPeriph_GPIOA
#define USARTx_TX_PIN GPIO_Pin_9
#define USARTx_TX_SOURCE GPIO_PinSource9
#define USARTx_TX_AF GPIO_AF_1
#define USARTx_RX_PIN GPIO_Pin_10
#define USARTx_RX_SOURCE GPIO_PinSource10
#define USARTx_RX_AF GPIO_AF_1
#define USARTx_IRQn USART1_IRQn
#define USARTx_IRQHandler USART1_IRQHandler
#define USARTx_CLK_ENABLE() RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE)
void uart_init (uint32_t baud);
#endif
uart的源码文件如下
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









