






永磁同步电机(pmsm,全速度切换无位置传感器控制(高速可以是超螺旋滑模)
低速可以是脉振高频方波注入,if开环等仿真模型。
切换有加权切换和双坐标切换。
YID:3180697422312043
神手5678
永磁同步电机(PMSM)是一种广泛应用于工业和家用电器领域的高效率电机。相比其他类型的电机,PMSM具有高功率密度、高效率和低噪音等优点,因此被广泛应用于各个领域。在控制PMSM的过程中,无位置传感器控制是一种常见的方法,它可以实现全速度切换,并能适应高速和低速运行的需求。
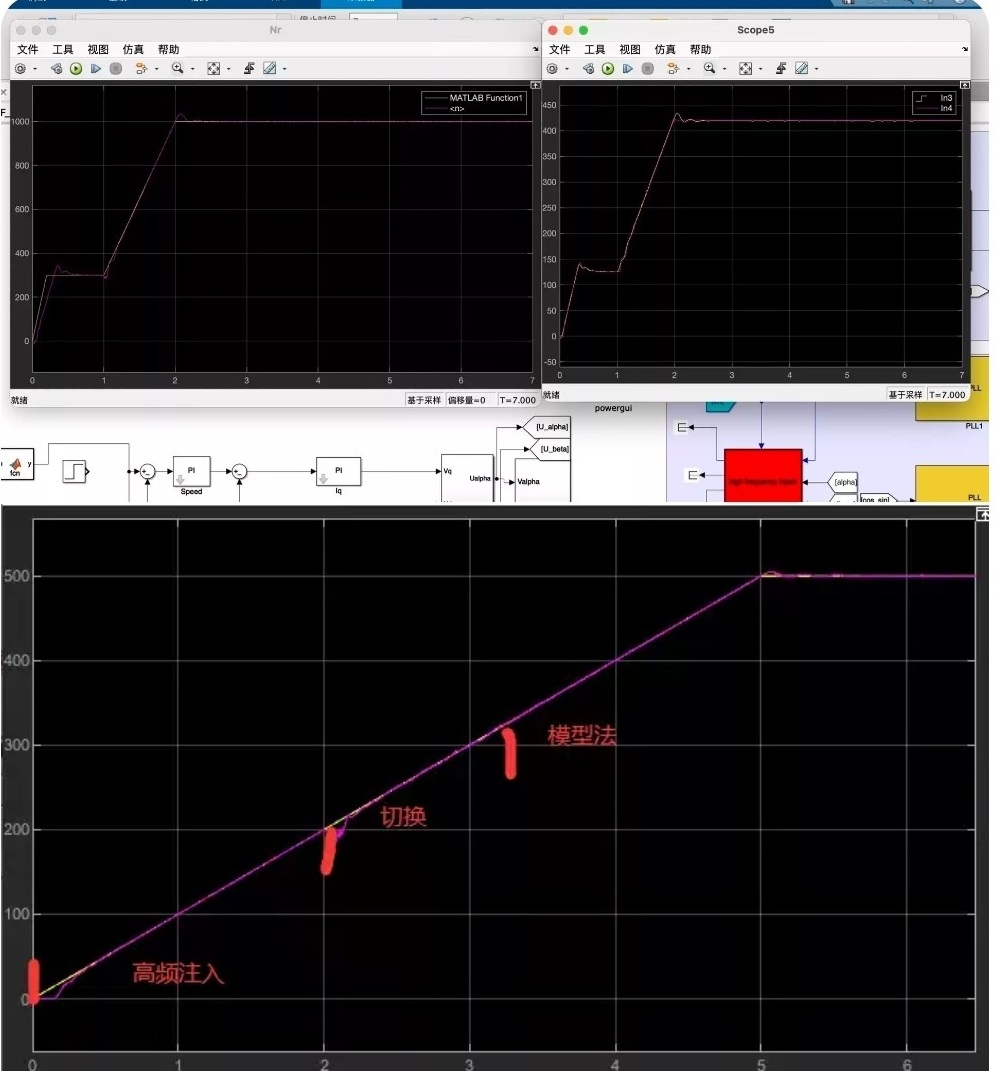
在无位置传感器控制中,高速运行时可以使用超螺旋滑模控制,低速运行时可以使用脉振高频方波注入和IF开环控制等仿真模型。其中,超螺旋滑模控制通过加入切换函数来实现控制器的切换,达到全速度切换的目的。脉振高频方波注入方法则通过向电机注入高频方波信号,从中提取出电机的位置信息,实现无位置传感器的控制。
在切换方法中,加权切换和双坐标切换是两种常见的方法。加权切换方法通过对控制信号进行加权运算,来实现控制器的切换。双坐标切换方法则将电机的位置信息转换为两个正交坐标系上的信号,通过比较这两个信号的大小,来决定控制器的切换。
除了以上提到的控制方法,还有许多其他的控制方法可以应用于PMSM的无位置传感器控制。这些控制方法在实际应用中有着不同的优缺点,需要根据具体的应用场景来选择。同时,不同的控制方法还有着不同的数学模型和算法,需要根据具体情况进行仿真和测试。在选择和设计PMSM的无位置传感器控制方案时,需要综合考虑电机的工作条件、控制要求和成本等因素。
综上所述,PMSM的无位置传感器控制是一项重要的技术,它可以实现全速度切换和适应不同运行条件的需求。通过选择合适的控制方法和算法,可以实现高效率、低噪音的电机控制,并满足各种应用场景的需求。在未来的研究中,可以进一步探索和改进PMSM的无位置传感器控制方法,以提高电机的性能和稳定性。
相关的代码,程序地址如下:http://coupd.cn/697422312043.html
















 554
554











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









