






 本文介绍了一种基于Transformer的稀疏锚点方法(SparseLaneformer)用于自动驾驶中的车道线检测。该方法通过学习性设计解决了传统anchor-based方法的问题,实验结果在CULane和Tusimple数据集上达到SOTA性能,展示了两阶段预测和创新的注意力机制的优势。
本文介绍了一种基于Transformer的稀疏锚点方法(SparseLaneformer)用于自动驾驶中的车道线检测。该方法通过学习性设计解决了传统anchor-based方法的问题,实验结果在CULane和Tusimple数据集上达到SOTA性能,展示了两阶段预测和创新的注意力机制的优势。
一、介绍
-
Sparse Laneformer 是 AMD AEAI 发表的一篇自动驾驶领域车道线的论文,论文是基于 transformer 架构和新颖的稀疏 anchor 的新方案,兼具效率和精度。
-
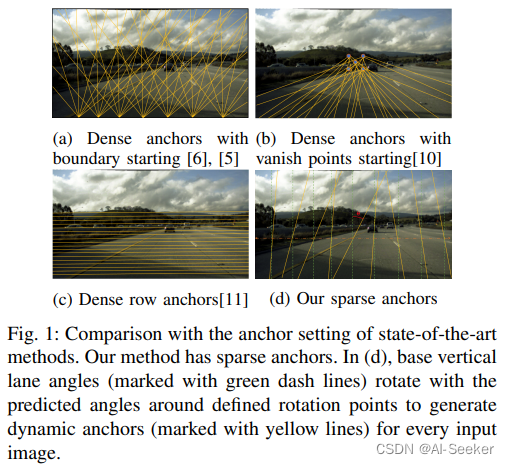
2D 车道线检测是辅助驾驶中重要的感知模块,用于感知车道线的信息,为智驾系统提供重要的环境感知信息。传统的 2D 车道线检测方案可以粗分为 1)segmentation-based 的方法,2)parameter-based 的方法和 3)anchor-based 的方法,其中anchor-based 的方法一般精度高速度快,但其一个特点需要设计比较稠密合理的 anchor,一般有几种常见的 anchor设计方法:1)从图片底边发射anchor,2)从消失点发射 anchor,3)基于行的 anchor等方法。anchor-based 方法通常需要分析数据集车道线分布来调整anchor设计来获取高精度。
-
文章基于 transformer-based 设计一种可学习的稀疏anchor 来解决anchor-based 存在的问题,其包括稠密anchor 和数据集依赖问题。基于 transformer 设计一个新颖的高效的车道线检测方法。
-
二、方法介绍
-
车道线表示方法:通过固定点数(x,y)如72点来描述车道线,所有车道线线的 y 都是 0-71 /72,所以只需要通过72个 x 值即可以描述一条车道线。
-
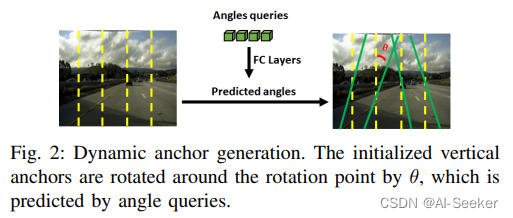
Sparse anchor 设计:通过预设 k(20) 个 anchor,每个 anchor 由一对 lane query 和 angle query 组成,如图 Fig 2,k 个 anchor 初始化为均匀的垂线,通过 angle query 预测 angle 来调整 anchor 设计,同时 lane query 预测 lane 相对对应 anchor的偏移量,最终达到精确预测车道线的目标。车道线 GT 通过 label assign 策略来匹配对应合适的(附近的)anchor 完成模型整体的优化。
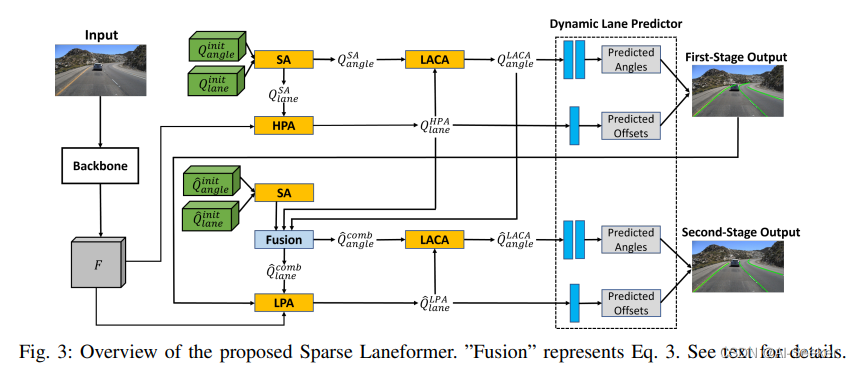
- 方法的整体架构:2 阶段方案,第二阶段基于第一阶段的结果 refine 预测
-
核心模块:要完成 query 和 feature 的交互,传统的 cross-attention 效率不高,文章设计了新的 cross-attention 模块,效率和精度均佳。
-
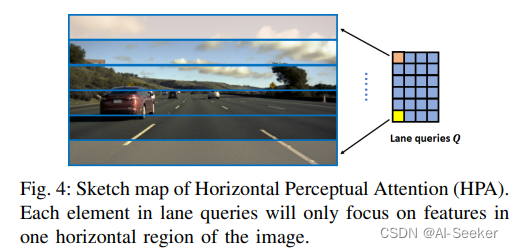
Horizontal Perceptual Attention (HPA)
-
-
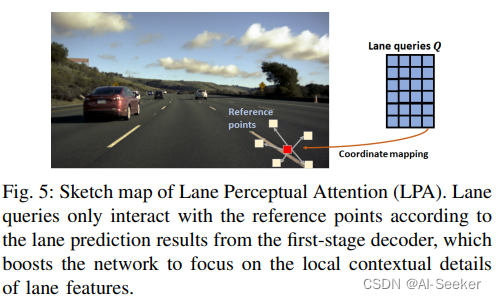
Lane Perceptual Attention (LPA)
-
-
三、实验结果
-
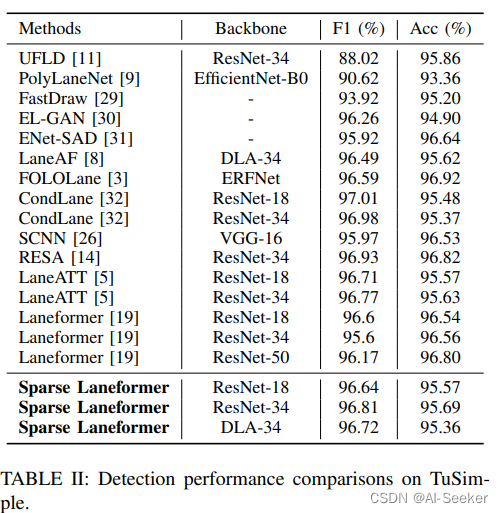
SOTA 方法对比:精度在 CULane 和 Tusimple 数据集取得 SOTA 效果,验证方法的有效性。
-

-
-
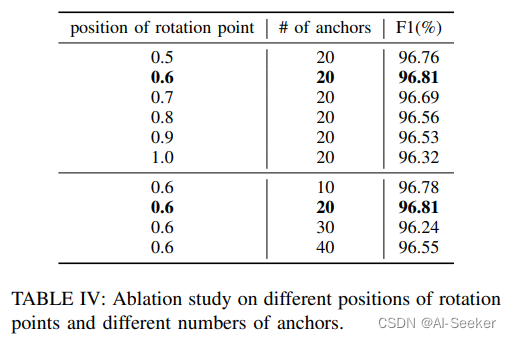
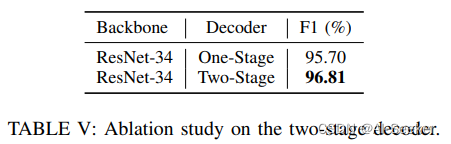
消融实验:证明了稀疏 anchor 和 two-stage 机制的有效性
-
-
-
四、一些思考
-
完成 transformer-based 方法,并取得不错的效果,工作量确实较大而难得。
-
Sparse anchor 设计很合理且有效,设计的 cross-attention 模块也很有效果。
-
可惜一点的精度并没有相对 CNN 的 anchor-based 方法有明显提升。















 1498
1498

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









