







实验器件
STC89C52RC的学习板子一个
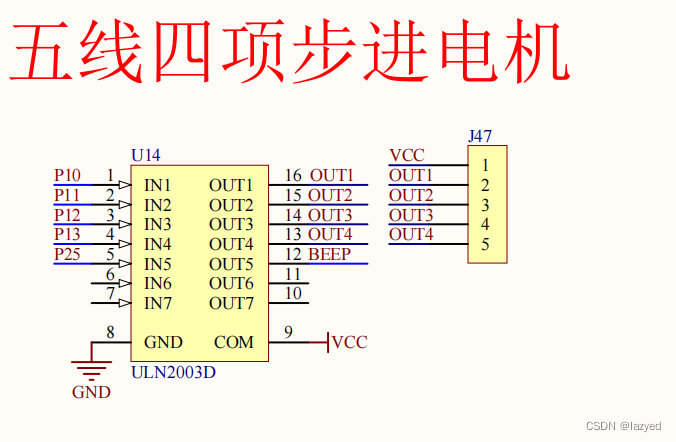
DC 5V 4相5线步进电机 28YBJ-48 减速步进电机一个
元器件连接:
51单片机开发板
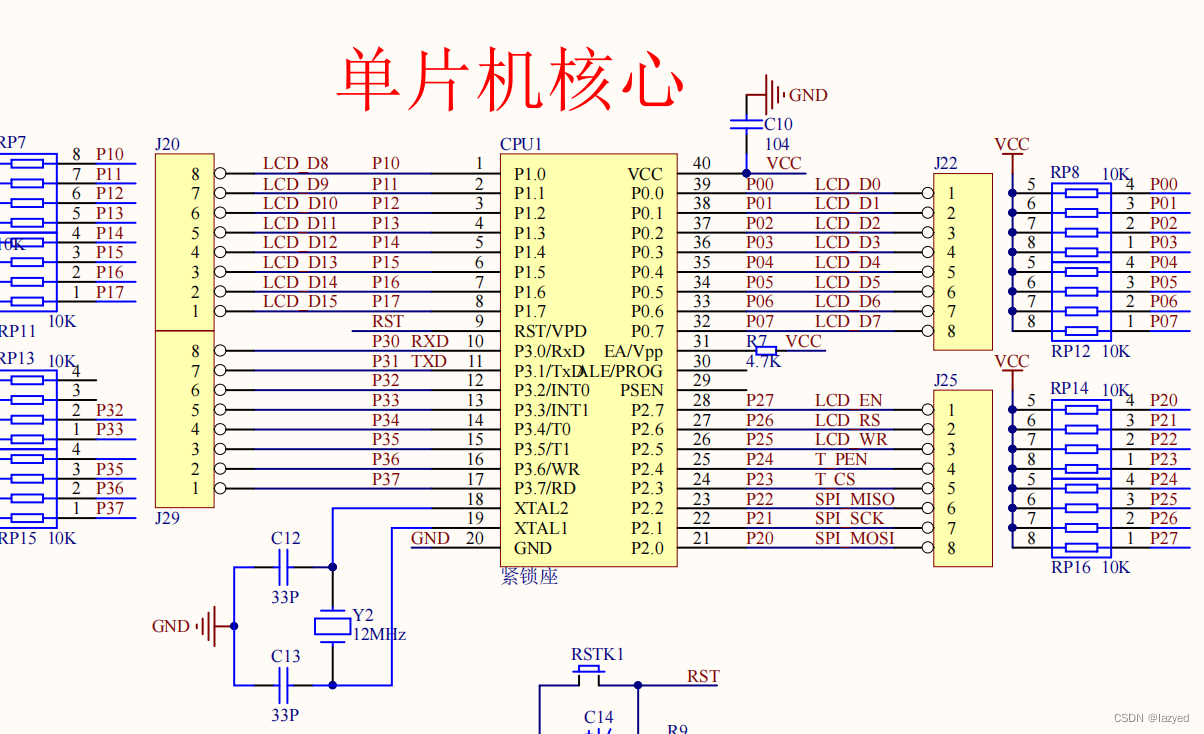
电气原理图
实验现象:下载程序后;
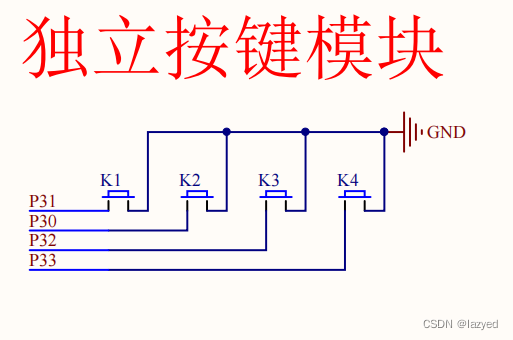
当按下KEY1键可调节电机旋转方向;
当按下KEY2键,电机加速;
当按下KEY3键,电机减速;
按下KEY4的时候,电机启动/停止;
(电机的速度程序中已经定义)
注意:将步进电机红色线对接到“步进电机模块”输出端子J47的5V上,其它相序依次接入。
#include "reg52.h"
typedef unsigned int u16;
typedef unsigned char u8; //对系统默认数据类型进行重定义
sbit IN1_A=P1^0;
sbit IN2_B=P1^1;
sbit IN3_C=P1^2;
sbit IN4_D=P1^3; //定义ULN2003控制步进电机管脚
sbit KEY1=P3^1;
sbit KEY2=P3^0;
sbit KEY3=P3^2;
sbit KEY4=P3^3; //定义独立按键控制脚
#define KEY1_PRESS 1
#define KEY2_PRESS 2
#define KEY3_PRESS 3
#define KEY4_PRESS 4
#define KEY_UNPRESS 0 //使用宏定义独立按键按下的键值
#define STEPMOTOR_MAXSPEED 1 // 定义步进电机速度,值越小,速度越快
#define STEPMOTOR_MINSPEED 5 // 最小不能小于1
void delay_10us(u16 ten_us) //延迟函数,ten/-us=1时,大约延时10us
{
while(ten_us--);
}
void delay_ms(u16 ms) //ms延迟函数,ms=1时,大约延时1ms
{
u16 i,j;
for(i=ms;i>0;i--)
for(j=110;j>0;j--);
}
void step_motor_28BYJ48_send_pulse(u8 step,u8 dir)
//输出一个数据给ULN2003从而实现向步进电机发送一个脉冲
{
u8 temp=step;
//指定步进序号,可选值0~7
if(dir==0) //如果为逆时针旋转;方向选择,1:顺时针,0:逆时针
temp=7-step;//调换节拍信号
switch(temp)//8个节拍控制:A->AB->B->BC->C->CD->D->DA
{
case 0: IN1_A=1;IN2_B=0;IN3_C=0;IN4_D=0;break;
case 1: IN1_A=1;IN2_B=1;IN3_C=0;IN4_D=0;break;
case 2: IN1_A=0;IN2_B=1;IN3_C=0;IN4_D=0;break;
case 3: IN1_A=0;IN2_B=1;IN3_C=1;IN4_D=0;break;
case 4: IN1_A=0;IN2_B=0;IN3_C=1;IN4_D=0;break;
case 5: IN1_A=0;IN2_B=0;IN3_C=1;IN4_D=1;break;
case 6: IN1_A=0;IN2_B=0;IN3_C=0;IN4_D=1;break;
case 7: IN1_A=1;IN2_B=0;IN3_C=0;IN4_D=1;break;
default: IN1_A=0;IN2_B=0;IN3_C=0;IN4_D=0;break;//停止相序
}
}
u8 key_scan(u8 mode)
{
static u8 key=1;
if(mode)key=1;//连续扫描按键
if(key==1&&(KEY1==0||KEY2==0||KEY3==0||KEY4==0))//任意按键按下
{
delay_10us(1000);//消抖
key=0;
if(KEY1==0)
return KEY1_PRESS;
else if(KEY2==0)
return KEY2_PRESS;
else if(KEY3==0)
return KEY3_PRESS;
else if(KEY4==0)
return KEY4_PRESS;
}
else if(KEY1==1&&KEY2==1&&KEY3==1&&KEY4==1) //无按键按下
{
key=1;
}
return KEY_UNPRESS;
}
/*
检测独立按键是否按下,按下则返回对应键值
mode=0:单次扫描按键;mode=1:连续扫描按键
KEY1_PRESS:K1按下
KEY2_PRESS:K2按下
KEY3_PRESS:K3按下
KEY4_PRESS:K4按下
KEY_UNPRESS:未有按键按下
*/
//主函数
void main()
{
u8 key=0;
u8 dir=0;//默认逆时针方向
u8 speed=STEPMOTOR_MAXSPEED;//默认最大速度旋转
u8 step=0;
int stepmove=0;
while(1)
{
key=key_scan(0);
if(key==KEY1_PRESS)//换向
{
dir=!dir;
}
else if(key==KEY2_PRESS)//加速
{
if(speed>STEPMOTOR_MAXSPEED)
speed-=1;
}
else if(key==KEY3_PRESS)//减速
{
if(speed<STEPMOTOR_MINSPEED)
speed+=1;
}
if(key==KEY4_PRESS)//按键一按下令步进电机旋转或停止
{
stepmove=!stepmove;
}
if(stepmove==1) //判断是否要让步进电机旋转
{
step_motor_28BYJ48_send_pulse(step++,dir);
if(step==8)step=0;
}
delay_ms(speed); //通过每一步的延时来调节步进电机的速度
}
}欢迎大家在评论区发表评论和意见

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









