







Linux v4l2架构学习总链接
基于RV1126平台imx291分析 --- 先研究media再分析应用调用文章中一开始就被media相关的吓退了。
一星期的时间去研究media相关知识,现在终于可以动手了
补充:
写完了这篇文章后,感觉open相关的其实可以忽略,这里也没有什么多余的open操作,唯一的v4l2_fh_open,vivi open中也分析了
这里更多的是media grpah,通过media graph可以遍历到每一个entity,这里主要学习如何遍历就可以了
rkcif_fh_open()
static int rkcif_fh_open(struct file *filp)
{
struct video_device *vdev = video_devdata(filp);
struct rkcif_vdev_node *vnode = vdev_to_node(vdev);
struct rkcif_stream *stream = to_rkcif_stream(vnode);
struct rkcif_device *cifdev = stream->cifdev;
int ret;
....
/* Make sure active sensor is valid before .set_fmt() */
ret = rkcif_update_sensor_info(stream);
if (ret < 0) {
v4l2_err(vdev,
"update sensor info failed %d\n",
ret);
return ret;
}
...
}rkcif_fh_open() -> rkcif_update_sensor_info()
int rkcif_update_sensor_info(struct rkcif_stream *stream)
{
struct rkcif_sensor_info *sensor, *terminal_sensor;
struct v4l2_subdev *sensor_sd;
int ret = 0;
/*
* 这里的sensor_sd是mipi csi的subdev
*/
sensor_sd = get_remote_sensor(stream, NULL);
if (!sensor_sd)
return -ENODEV;
...
}rkcif_fh_open() -> rkcif_update_sensor_info() -> get_remote_sensor()
struct media_pad *media_entity_remote_pad(const struct media_pad *pad)
{
struct media_link *link;
/*
* 注意这里的links链表上link和backlink
* 对于rkcif_mipi来说,没有source pad
* 所以不会有link,只有backlink
* 也就是说link->sink == pad
* 返回的link->source 则是mipi csi 的source pad
*/
list_for_each_entry(link, &pad->entity->links, list) {
if (!(link->flags & MEDIA_LNK_FL_ENABLED))
continue;
if (link->source == pad)
return link->sink;
if (link->sink == pad)
return link->source;
}
return NULL;
}
static struct v4l2_subdev *get_remote_sensor(struct rkcif_stream *stream, u16 *index)
{
struct media_pad *local, *remote;
struct media_entity *sensor_me;
/*
* rkcif_mipi 会产生4个video节点,每个video阶段对应的entity只有1个pad
*/
local = &stream->vnode.vdev.entity.pads[0];
if (!local)
return NULL;
remote = media_entity_remote_pad(local);
if (!remote)
return NULL;
if (index)
*index = remote->index;
/*
* 上面知道remote是mipi csi的source pad
* 所以sensor_me就是 mipi csi 的 entity
*/
sensor_me = remote->entity;
/*
* 知道了sensor_me就是 mipi csi 的 entity
* 那么这里返回的就是mipi csi的subdev
*/
return media_entity_to_v4l2_subdev(sensor_me);
}
回到rkcif_update_sensor_info继续分析
rkcif_fh_open() -> rkcif_update_sensor_info() -> sd_to_sensor()
int rkcif_update_sensor_info(struct rkcif_stream *stream)
{
struct rkcif_sensor_info *sensor, *terminal_sensor;
struct v4l2_subdev *sensor_sd;
int ret = 0;
...
sensor = sd_to_sensor(stream->cifdev, sensor_sd);
if (!sensor) {
v4l2_err(&stream->cifdev->v4l2_dev, "get sensor for updating failed!\n");
return -ENODEV;
}
...
}
static struct rkcif_sensor_info *sd_to_sensor(struct rkcif_device *dev,
struct v4l2_subdev *sd)
{
u32 i;
/*
* sensor[] 是怎么来的
* 具体可以看前面的分析。notify->bound函数
* 基于RV1126平台imx291分析 --- media部件连接 一
* https://blog.csdn.net/ldl617/article/details/115720600
*/
for (i = 0; i < dev->num_sensors; ++i)
if (dev->sensors[i].sd == sd)
return &dev->sensors[i];
if (i == dev->num_sensors) {
for (i = 0; i < dev->num_sensors; ++i) {
if (dev->sensors[i].mbus.type == V4L2_MBUS_CCP2)
return &dev->lvds_subdev.sensor_self;
}
}
return NULL;
}回到rkcif_update_sensor_info继续分析
rkcif_fh_open() -> rkcif_update_sensor_info()
int rkcif_update_sensor_info(struct rkcif_stream *stream)
{
...
/*
* sensor->sd是mipi csi的subdev
*/
ret = v4l2_subdev_call(sensor->sd, video, g_mbus_config,
&sensor->mbus);
if (ret && ret != -ENOIOCTLCMD)
return ret;
/*
* 保存到active_sensor
*/
stream->cifdev->active_sensor = sensor;
...
}rkcif_fh_open() -> rkcif_update_sensor_info() -> g_mbus_config...
对于g_mbus_config肯定是一系列的调用。因为这里的3个subdev驱动都有这个代码,下面看看是如何依次调用到

首先是mipi csi的g_mbus_config
static struct v4l2_subdev *get_remote_sensor(struct v4l2_subdev *sd)
{
struct media_pad *local, *remote;
struct media_entity *sensor_me;
/*
* media_entity_remote_pad 和 media_entity_to_v4l2_subdev
* 上面都分析过,这里就直接口述不再贴代码
* 之前说过每个entity都可能会有link和backlink
* 对于这里为什么区sink pad而不是source pad,这里说一下原因
* -------------------方向-------------------->
* imx291 -> mipi csi phy -> mipi csi -> rkcif_mipi
* 首先要知道我们的目的是向后寻找,也就是找mipi csi phy
* 而不是向前找rkcif_mipi
* 所以这里是sink pad的时候,当前entity的link是不会满足的
* 只有backlink才满足
* 只有这样返回的remote的值才是mipi csi phy的source pad
*/
local = &sd->entity.pads[RK_CSI2_PAD_SINK];
remote = media_entity_remote_pad(local);
if (!remote) {
v4l2_warn(sd, "No link between dphy and sensor\n");
return NULL;
}
/*
* 这里的代码是bug吗?
* 直接使用remote->entity不香吗?
* sensor_me是mipi csi phy的entity
*/
sensor_me = media_entity_remote_pad(local)->entity;
/*
* 这里返回的是mipi csi phy的subdev
*/
return media_entity_to_v4l2_subdev(sensor_me);
}
static int csi2_g_mbus_config(struct v4l2_subdev *sd,
struct v4l2_mbus_config *mbus)
{
/*
* 得到了mipi csi phy的subdev
*/
struct v4l2_subdev *sensor_sd = get_remote_sensor(sd);
int ret;
/*
* 这里会调用mipi csi phy的g_mbus_config
*/
ret = v4l2_subdev_call(sensor_sd, video, g_mbus_config, mbus);
if (ret)
return ret;
return 0;
}接着是mipi csi phy的g_mbus_config
static int mipidphy_g_mbus_config(struct v4l2_subdev *sd,
struct v4l2_mbus_config *config)
{
struct mipidphy_priv *priv = to_dphy_priv(sd);
/*
* 这里的分析同上
* 对应的sensor_sd是imx291的subdev
*/
struct v4l2_subdev *sensor_sd = get_remote_sensor(sd);
struct mipidphy_sensor *sensor;
if (!sensor_sd)
return -ENODEV;
/*
* 这里要看 rockchip_mipidphy_notifier_bound
* 基于RV1126平台imx291分析 --- media部件连接 三
* https://blog.csdn.net/ldl617/article/details/115726576
*/
sensor = sd_to_sensor(priv, sensor_sd);
/*
* 主意这里传入的是sd,而不是sensor
* mipidphy_update_sensor_mbus中会再进行一次上面的操作
*/
mipidphy_update_sensor_mbus(sd);
*config = sensor->mbus;
return 0;
}
static int mipidphy_update_sensor_mbus(struct v4l2_subdev *sd)
{
struct mipidphy_priv *priv = to_dphy_priv(sd);
struct v4l2_subdev *sensor_sd = get_remote_sensor(sd);
struct mipidphy_sensor *sensor = sd_to_sensor(priv, sensor_sd);
struct v4l2_mbus_config mbus;
int ret;
/*
* 调用imx291到g_mbus_config
*/
ret = v4l2_subdev_call(sensor_sd, video, g_mbus_config, &mbus);
if (ret)
return ret;
...
}最后是调用imx291到g_mbus_config。
int rkcif_update_sensor_info(struct rkcif_stream *stream)
{
...
/*
* 准备填充terminal_sensor
*/
terminal_sensor = &stream->cifdev->terminal_sensor;
get_remote_terminal_sensor(stream, &terminal_sensor->sd);
if (terminal_sensor->sd) {
ret = v4l2_subdev_call(terminal_sensor->sd, video, g_mbus_config,
&terminal_sensor->mbus);
if (ret && ret != -ENOIOCTLCMD)
return ret;
}
...
}rkcif_fh_open() -> rkcif_update_sensor_info() -> get_remote_terminal_sensor()
static void stack_push(struct media_graph *graph,
struct media_entity *entity)
{
if (graph->top == MEDIA_ENTITY_ENUM_MAX_DEPTH - 1) {
WARN_ON(1);
return;
}
/*
* top值加1
* link这里可能是link也可能是backlink
*/
graph->top++;
graph->stack[graph->top].link = entity->links.next;
graph->stack[graph->top].entity = entity;
}
void media_graph_walk_start(struct media_graph *graph,
struct media_entity *entity)
{
media_entity_enum_zero(&graph->ent_enum);
media_entity_enum_set(&graph->ent_enum, entity);
/*
* 这里就是entity总数加1操作的原因
* stack[0].entity = NULL
*/
graph->top = 0;
graph->stack[graph->top].entity = NULL;
stack_push(graph, entity);
dev_dbg(entity->graph_obj.mdev->dev,
"begin graph walk at '%s'\n", entity->name);
}
static void get_remote_terminal_sensor(struct rkcif_stream *stream,
struct v4l2_subdev **sensor_sd)
{
struct media_graph graph;
struct media_entity *entity = &stream->vnode.vdev.entity;
struct media_device *mdev = entity->graph_obj.mdev;
int ret;
/* Walk the graph to locate sensor nodes. */
mutex_lock(&mdev->graph_mutex);
/*
* media_graph_walk_init
* 之前分析过这个函数
* 主要作用就是 graph.ent_enum.bmap申请一块内存空间
* 这块空间的大小计算方式
* 1. size = mdev->entity_internal_idx_max + 1 所有的entity数量加1
* 加1的目的是要保存一个NULL用作top,后面分析会看到
* 2. size = ALLGN(size, BITS_PER_LONG)
* 3. size = (size/BITS_PER_LONG) * sizeof(long)
*/
ret = media_graph_walk_init(&graph, mdev);
if (ret) {
mutex_unlock(&mdev->graph_mutex);
*sensor_sd = NULL;
return;
}
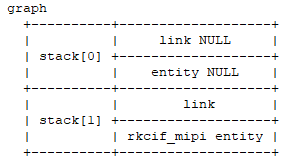
media_graph_walk_start(&graph, entity);
...
}
上面执行后,会得到这样一个效果图
接着分析 rkcif_fh_open() -> rkcif_update_sensor_info() -> get_remote_terminal_sensor()
#define link_top(en) ((en)->stack[(en)->top].link)
#define stack_top(en) ((en)->stack[(en)->top].entity)
static struct media_entity *
media_entity_other(struct media_entity *entity, struct media_link *link)
{
printk(KERN_CRIT "entity->name 0 is %s\n", entity->name);
if (link->is_backlink)
printk(KERN_CRIT "is backlink!\n");
else
printk(KERN_CRIT "is link!\n");
if (link->source->entity == entity) {
printk(KERN_CRIT "entity->name 1 is %s\n", link->sink->entity->name);
return link->sink->entity;
} else {
printk(KERN_CRIT "entity->name 2 is %s\n", link->source->entity->name);
return link->source->entity;
}
}
static void media_graph_walk_iter(struct media_graph *graph)
{
struct media_entity *entity = stack_top(graph);
struct media_link *link;
struct media_entity *next;
/*
* 转换得到media_link
* link或者backlink都有可能
*/
link = list_entry(link_top(graph), typeof(*link), list);
/* The link is not enabled so we do not follow. */
/*
* 处理标志位没有ENABLED的link
*/
if (!(link->flags & MEDIA_LNK_FL_ENABLED)) {
/*
* 找到下一个link
*/
link_top(graph) = link_top(graph)->next;
dev_dbg(entity->graph_obj.mdev->dev,
"walk: skipping disabled link '%s':%u -> '%s':%u\n",
link->source->entity->name, link->source->index,
link->sink->entity->name, link->sink->index);
return;
}
/* Get the entity in the other end of the link . */
/*
* 解析link或者backlink
* 这里打算加些log方便分析,见上面
*/
next = media_entity_other(entity, link);
/* Has the entity already been visited? */
/*
* 判断entity是否被访问过
*/
if (media_entity_enum_test_and_set(&graph->ent_enum, next)) {
link_top(graph) = link_top(graph)->next;
dev_dbg(entity->graph_obj.mdev->dev,
"walk: skipping entity '%s' (already seen)\n",
next->name);
return;
}
/* Push the new entity to stack and start over. */
/*
* 找到下一个link
*/
link_top(graph) = link_top(graph)->next;
/* 对应的link和entity再入栈 */
stack_push(graph, next);
dev_dbg(entity->graph_obj.mdev->dev, "walk: pushing '%s' on stack\n",
next->name);
}
struct media_entity *media_graph_walk_next(struct media_graph *graph)
{
struct media_entity *entity;
if (stack_top(graph) == NULL)
return NULL;
/*
* Depth first search. Push entity to stack and continue from
* top of the stack until no more entities on the level can be
* found.
*/
/*
* link_top(graph) 是links链表上的成员
* stack_top(graph)->links 是links链表的链表头
*
*/
while (link_top(graph) != &stack_top(graph)->links)
media_graph_walk_iter(graph);
/*
* 最底层的就是我们需要的
*/
entity = stack_pop(graph);
dev_dbg(entity->graph_obj.mdev->dev,
"walk: returning entity '%s'\n", entity->name);
return entity;
}
static void get_remote_terminal_sensor(struct rkcif_stream *stream,
struct v4l2_subdev **sensor_sd)
{
...
/*
* 这里千辛万苦的找到了imx291的subdev
* 但是我们之前已经找到过imx291了,这里为什么还要再换一种方法呢?
* 原因是之前的方法是rockchip的,没有通用性,
* 这里是内核的,是通用的
*/
while ((entity = media_graph_walk_next(&graph))) {
/*
* 找到MEDIA_ENT_F_CAM_SENSOR标志的entity 退出
* 如果没有的话,这里会变成死循环吗?
*/
if (entity->function == MEDIA_ENT_F_CAM_SENSOR)
break;
}
mutex_unlock(&mdev->graph_mutex);
media_graph_walk_cleanup(&graph);
if (entity)
/*
* 通过entity找到subdev
*/
*sensor_sd = media_entity_to_v4l2_subdev(entity);
else
*sensor_sd = NULL;
}media_entity_other加了log,应用执行open,底层log如下
[17666.981635] rkcif rkcif_mipi_lvds: begin graph walk at 'stream_cif_mipi_id0'
[17666.981641] entity->name 0 is stream_cif_mipi_id0
[17666.981660] is backlink!
[17666.981670] entity->name 2 is rockchip-mipi-csi2
[17666.981684] rkcif rkcif_mipi_lvds: walk: pushing 'rockchip-mipi-csi2' on stack
[17666.981686] entity->name 0 is rockchip-mipi-csi2
[17666.981696] is backlink!
[17666.981703] entity->name 2 is rockchip-mipi-dphy-rx
[17666.981715] rkcif rkcif_mipi_lvds: walk: pushing 'rockchip-mipi-dphy-rx' on stack
[17666.981718] entity->name 0 is rockchip-mipi-dphy-rx
[17666.981727] is link!
[17666.981735] entity->name 1 is rockchip-mipi-csi2
[17666.981747] rkcif rkcif_mipi_lvds: walk: skipping entity 'rockchip-mipi-csi2' (already seen)
[17666.981749] entity->name 0 is rockchip-mipi-dphy-rx
[17666.981760] is backlink!
[17666.981768] entity->name 2 is m01_f_imx291 1-001a
[17666.981780] rkcif rkcif_mipi_lvds: walk: pushing 'm01_f_imx291 1-001a' on stack
[17666.981783] entity->name 0 is m01_f_imx291 1-001a
[17666.981789] is link!
[17666.981796] entity->name 1 is rockchip-mipi-dphy-rx
[17666.981807] rkcif rkcif_mipi_lvds: walk: skipping entity 'rockchip-mipi-dphy-rx' (already seen)
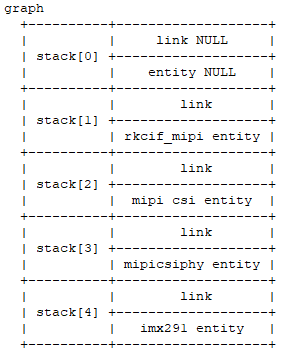
[17666.981811] rkcif rkcif_mipi_lvds: walk: returning entity 'm01_f_imx291 1-001a'
对应的效果图如下
继续分析 rkcif_fh_open()
static int rkcif_fh_open(struct file *filp)
{
...
ret = v4l2_fh_open(filp);
if (!ret) {
ret = v4l2_pipeline_pm_use(&vnode->vdev.entity, 1);
if (ret < 0)
vb2_fop_release(filp);
}
...
}对于v4l2_pipeline_pm_use下一遍文章分析
















 4954
4954











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











