



 本文介绍了JVM中的三种垃圾回收算法:标记–清除算法、复制算法和标记–压缩算法。详细阐述了每种算法的工作原理、优缺点,并进行了对比。
本文介绍了JVM中的三种垃圾回收算法:标记–清除算法、复制算法和标记–压缩算法。详细阐述了每种算法的工作原理、优缺点,并进行了对比。
概述
-
通过引用计数法和可达性分析算法成功区分出内存中哪些对象时需要回收的对象以后,GC接下来的任务就是执行垃圾回收,释放掉无用垃圾所占用的内存空间,以便有足够的可用内存空间为新对象分配内存。
-
在JVM中比较常见的三种垃圾收集算法有:
- 标记–清除算法 (Mark – Sweep)
- 复制算法 (Copying)
- 标记–压缩算法(Mark – Compact)
标记–清除算法 (Mark – Sweep)
标记–清除算法时一种非常基础和常见的垃圾收集算法,该算法被提出者在1960年用在了Lisp语言。
- 执行过程
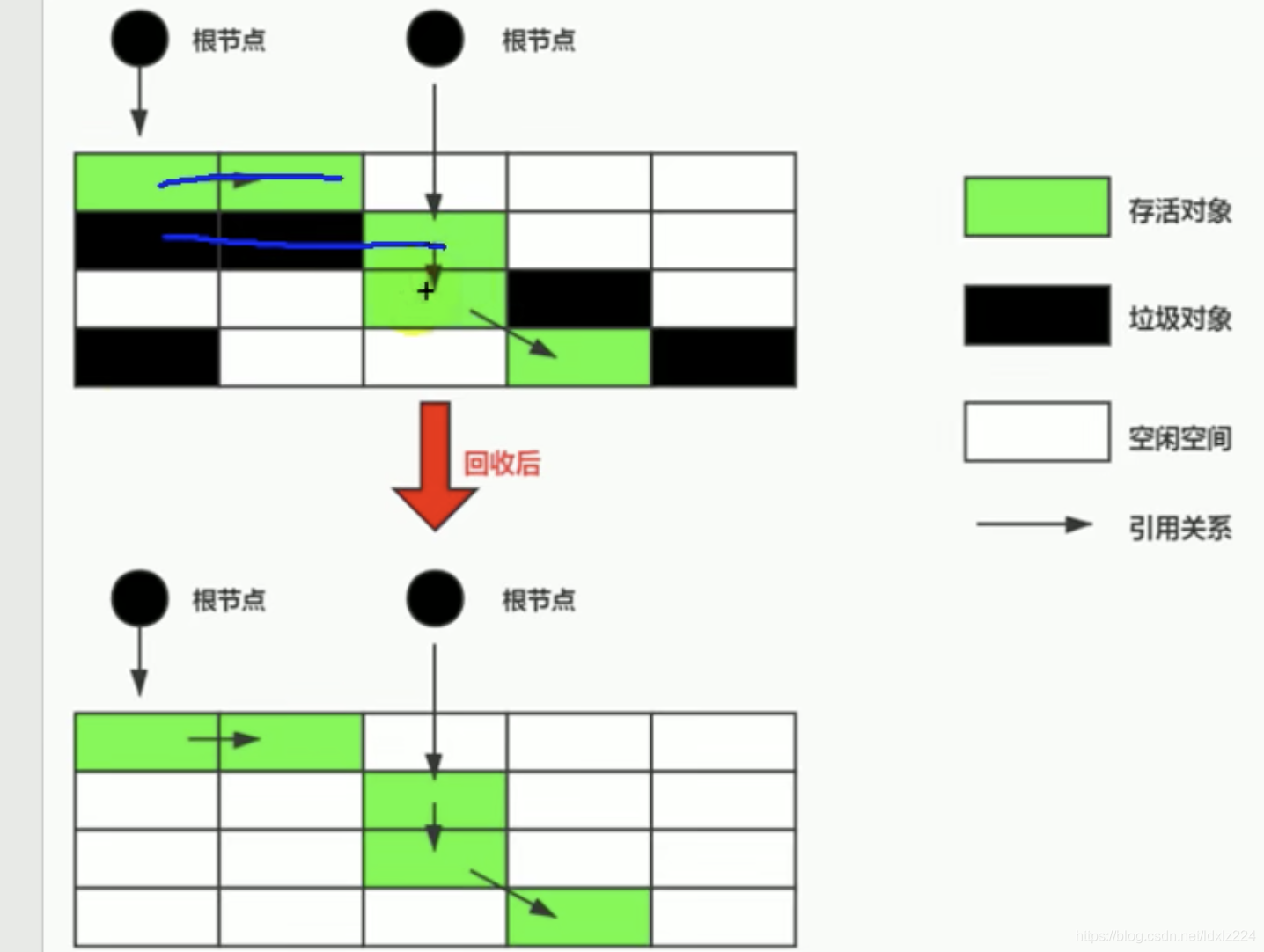
当系统的有效空间(available memory)被耗尽的时候,就会停止整个程序(也称为:Stop the world)然后进行两个工作:标记和清除
- 标记:Collector从引用根节点开始遍历,标记所有被引用的对象。一般是在Header中记录为可达的对象。
- 清除:Collector从对堆内存从头到位进行线性遍历,如果发现某个对象在Header中没有标记为可达对象,那么将其被回收。
- 缺点
- 效率不高(需要通过根节点遍历所有的对象并标记(还是两次一次标记一次清除),虽然不是遍历所有的对象)
- 再进行GC的时候,需要停止整个应用,导致用户体验差
- 这种清理出来的空间是不连续的产生内存碎片。需要维护一个空闲列表。
- 什么是清除
所谓的清除并不是真的置空,而是把需要清除的对象保存在空闲地址列表中。下次有新的对象需要加载时,判断垃圾的位置是否足够,如果足够则存放。
复制算法 (Copying)
-
背景
为了解决标记–清除算法的缺陷,于是1963年的一个大牛设计出了 复制算法 -
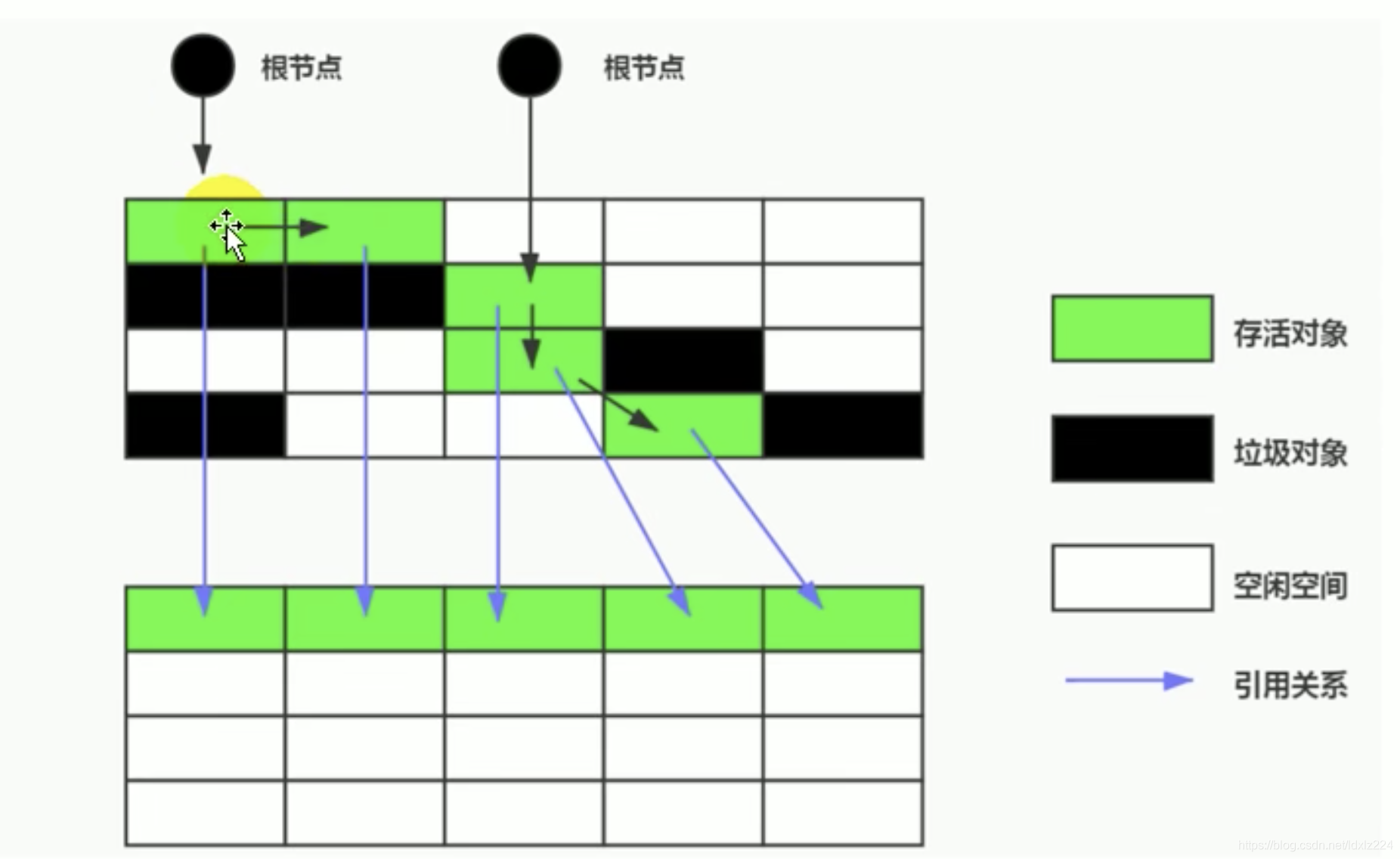
核心思想
将活着的内存空间分为两块,每次只使用其中的一块,在垃圾回收时将正在使用的内存中的活对象复制到未被使用的内存块中,之后将正在使用的内存块中的所有对象进行清除,交换两个内存的角色,最后完成垃圾回收。 -
之前讲的对象内存分配的时候就采用了这种方式
-
优点
- 没有标记和清除过程,实现简单运行高效。
- 复制过去后,保证空间连续,不会出现碎片问题。
- 缺点
- 缺点很明显的就是需要使用两倍的空间
- 对于G1这种分拆成大量region的GC,复制而不是移动,意味着GC需要维护region的对象引用关系,不管是内存占用还是时间开销也不小。
- 特别
如果系统中垃圾对象很多,复制算法需要存活的对象数量并不会太大,活着非常低才行(所以只有新生代采用了这种方式,因为绝大多数的对象都是朝生夕死)
标记–压缩(整理)算法(Mark – Compact)
-
背景
1.复制算法的高效是建立在存活对象少,垃圾对象多的前提下。这种情况在新生代比较常见,但是老年代更常见的是存活对象比较多。如果这种情况再使用复制算法,由于存活对象比较多,复制成本也将很高。因此:基于老年代垃圾回收的特性,需要使用其他的算法。
2.标记–清除算法的确可以应用在老年代中,但是该算法不仅执行效率低下,而且会产生碎片化问题,所以在此算法之上进行了改进,标记压缩算法由此诞生。
3.1970年前后,发布了标记–压缩算法,在许多垃圾回收器中,人们都使用了这种算法或其改进版本。 -
执行过程
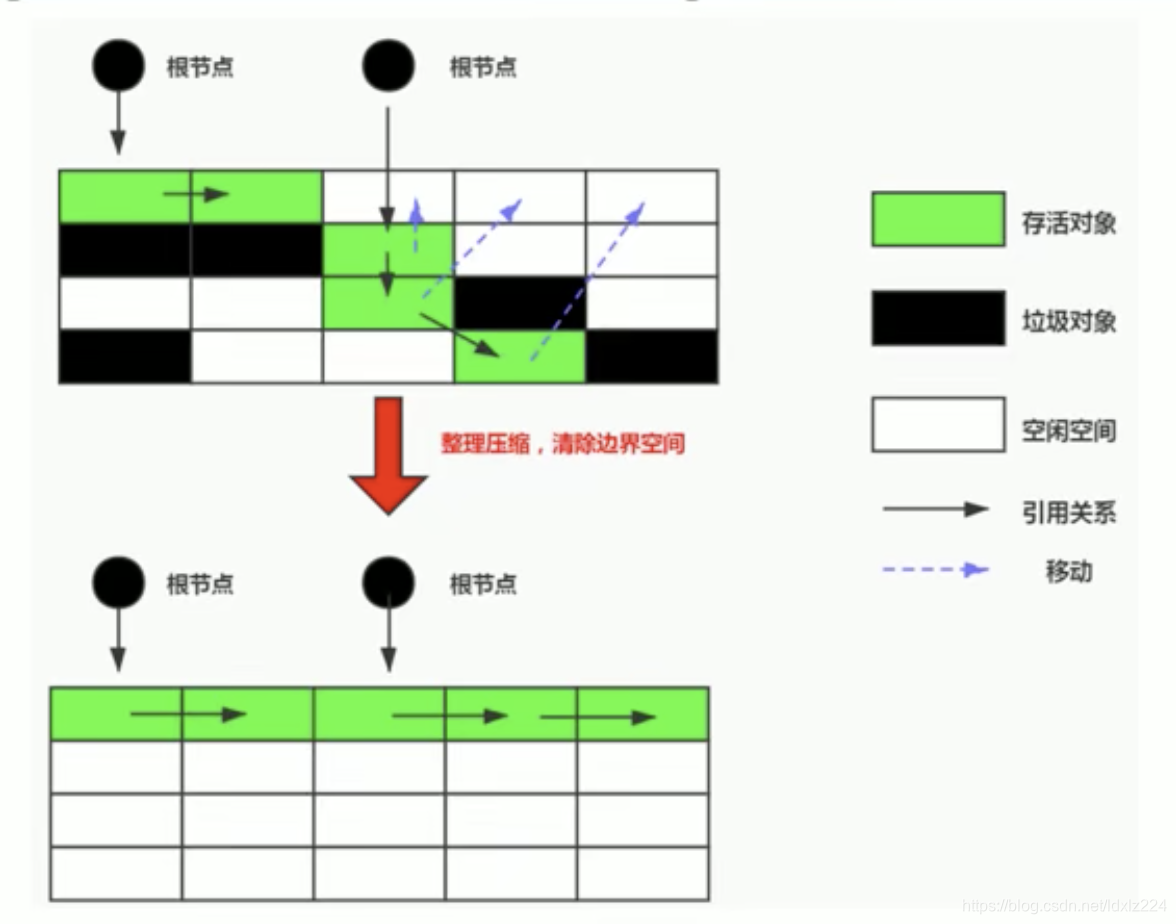
第一阶段和标记–清除算法一样,从根节点开始标记所有的引用对象。
第二阶段将所有的存活对象压缩到内存的一端,按照顺序摆放后,清理边界外所有的空间。
-
标记–压缩算法最终效果等同于 标记–清除算法 完成后增加了内存碎片整理的过程。因此也可以称为标记–压缩–整理算法(Mark–Sweep–Compact)。二者的本质区别是标记–清除算法是一种非移动式的回收算法。标记–压缩是移动式的算法,是否移动式的回收对象是一种优缺点并存的决策。
-
标记存活的对象会被整理。按照内存地址依次排序,而未被标记的内存将会回收掉。如此一来,当我们需要给新对象分配内存时,JVM只需要持有一个内存的起始地址即可,这比维护一个空闲列表少了许多开销。
-
优缺点
优点:
- 消除了标记–清除算法中内存区域分散的缺点,我们需要给新对象分配内存时,JVM只需要持有内存的起始地址即可。
- 消除了复制算法中,内存减半的问题。
缺点:
- 从效率上来讲,标记–压缩算法效率上低于复制算法。
- 移动对象的同时,如果对象被其他对象引用,那么同时需要修改其引用地址。
- 移动过程中,需要全程终止用户线程。即STW
三种算法的对比
| . | Mark-Sweep | Mark-Compact | Copying |
|---|---|---|---|
| 速度 | 中等 | 最慢 | 最快 |
| 空间开销 | 少(但是会堆积碎片) | 少(不堆积碎片) | 通常需要活对象的两倍大小(不堆积碎片) |
| 移动对象 | 否 | 是 | 是 |
- 从效率上来说复制算法时最快的,但是浪费了太多的空间。
- 而为了尽量满足上面的三个指标,标记整理算法相对更平衡一些,你是效率上不尽人意,比标记-清除算法多了一个整理阶段,比复制算法多了一个标记阶段。

















 2995
2995

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









