







YDLIDAR G4激光雷达 设置教程 基于ubuntu + ros1 2024年2月
重要链接:
https://github.com/YDLIDAR/YDLidar-SDK
https://github.com/YDLIDAR/ydlidar_ros_driver
链接:https://pan.baidu.com/s/1kmG0RNr5NlmVO8cO-7hUEw?pwd=6666
提取码:6666
由于网络问题,推荐上github把包下载下来,然后解压进行安装。
一、接线
一个数据口(type-c)、一个供电口(micro USB ,使用5v)
二、安装YDlidar-SDK
在ubuntu中,某个文件夹下面(推荐可以下载在Download中)打开终端:Ctrl + Alt+T
注意事项:YDLidar-SDK文件夹下的build文件夹,需要自己创建mkdir build
git clone https://github.com/YDLIDAR/YDLidar-SDK.git
mkdir build
cd build
cmake ..
make
sudo make install
编译完成:
make完成标志:

三、安装ydlidar_ros_driver功能包
注意:功能包要安装在你的工作空间中的src文件夹中
echo "source ~/G4_lidar_ws/devel/setup.bash" >> ~/.bashrc,将工作空间添加到环境变量内。G4_lidar_ws为你自己的工作空间,需要自行修改- 在安装initenv.sh之前,需要对src中的ydlidar_ros_driver-master中的startup中的所有东西进行赋予权限
sudo sh src/ydlidar_ros_driver/startup/initenv.sh:适用于直接使用git clone下载的包sudo sh src/ydlidar_ros_driver-master/startup/initenv.sh:适用于将功能包从github上面下载下来的情况(带有master分支标识)
cd 你自己的工作空间/src
source ./devel/setup.sh
echo "source ~/你自己的工作空间/devel/setup.bash" >> ~/.bashrc
catkin_make
source ./devel/setup.bash
sudo chmod 777 src/ydlidar_ros_driver/startup/*
或者:
chmod 0777 src/ydlidar_ros_driver-master/startup/*
sudo sh src/ydlidar_ros_driver-master/startup/initenv.sh
或者:
sudo sh src/ydlidar_ros_driver/startup/initenv.sh
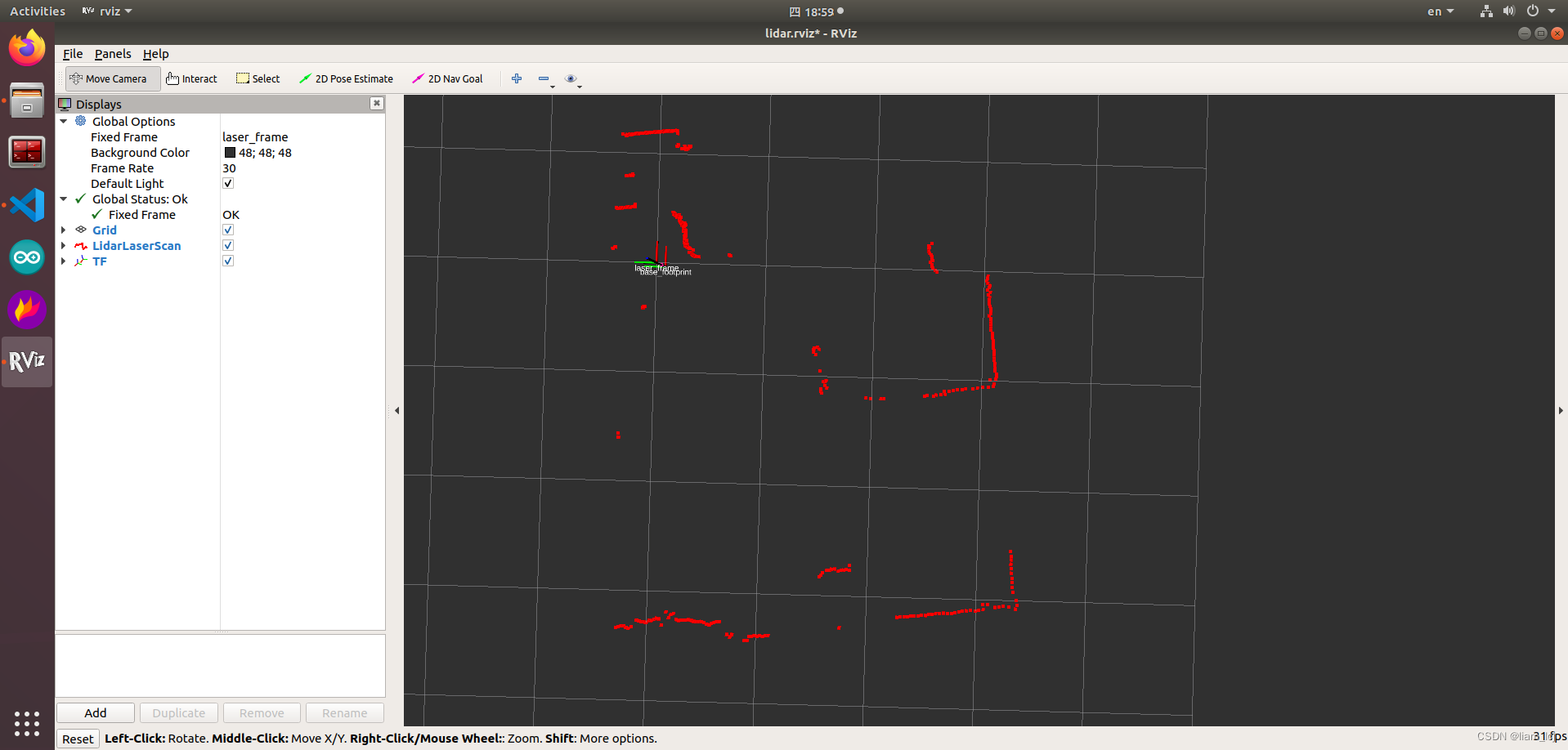
四、查看点云信息
roslaunch ydlidar_ros_driver lidar_view.launch
成功运行:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









