



目录
3、学习课程名称:《Getting Started: Simulating Your First Robot in Isaac Sim》
虚实通玄录——从凡胎到元婴的机器人渡劫之路
Isaac Sim是NVIDIA基于Omniverse平台打造的高保真机器人仿真宇宙,堪称“数字世界的机械道场”。它并非简单的3D建模工具,而是一个集物理模拟、AI训练、传感器仿真、多机协作于一体的全息实验室,让开发者能在虚拟时空中孕育、锤炼、点化智能机器生命。演示效果Isaac Sim和ROS2自主移动机器人issac sim 机器人大家庭多视角展示。
一、虚空传道录
1、Isaac Sim的介绍
Isaac Sim 是NVIDIA基于Omniverse平台打造的高保真机器人仿真宇宙,堪称“数字世界的机械道场”。它并非简单的3D建模工具,而是一个集物理模拟、AI训练、传感器仿真、多机协作于一体的全息实验室,让开发者能在虚拟时空中孕育、锤炼、点化智能机器生命。
演示效果:
Isaac Sim和ROS2自主移动机器人
issac sim 机器人大家庭多视角展示
2、为何选择Isaac Sim?
-
相较Gazebo:
如元婴修士对比筑基弟子,光影拟真度与物理精度横跨三重大境界。 -
对比Webots:
GPU加速的AI训练速度,堪比缩地成寸的神通。 -
超越传统仿真:
实时射线追踪+物理引擎,让虚拟试错不再“纸上谈兵”。
Isaac Sim的本质,是NVIDIA用算力铸就的机械修真编年史。在这里:
-
一行代码可化洪荒之力
-
一个算法能定万物生死
-
一次仿真正是文明的「量子跃迁」
开发者于此间既是造物主,也是求道者——当你凝视虚拟机器人时,机器人亦通过你的双眼,凝视着真实世界的法则本源。
3、学习课程名称:《Getting Started: Simulating Your First Robot in Isaac Sim》
注册/登录NVIDIA DLl课程(该课程目前完全免费)
注册登录的注意事项,便不在这里赘述了。
二、本命法宝祭炼
1、修炼环境
在安装的过程中,电脑的配置(如硬盘大小、内存大小、显存容量,操作系统等等)这些都将影响Isaac Sim的后续使用体验。所以配置好的修炼环境将大大提高修炼的速度,这是至关重要的。
由于Omniverse平台将于2025年10月1号进行封闭,所以Isaac Sim需要进行个人自主安装。
以下是安装的官方教程和电脑配置要求:
Isaac Sim Installing![]() https://docs.isaacsim.omniverse.nvidia.com/latest/installation/requirements.html
https://docs.isaacsim.omniverse.nvidia.com/latest/installation/requirements.html
2、安装心法
经过不少网友在安装Isaac Sim的时候遇到的五花八门的坑位,我将其进行整理,并将大佬人士提出的建议进行反馈,希望大家可以在别人的坑位的基础上找到正确的安装方式。
1、资源下载缓慢
由于Isaac Sim 的压缩包有点大,如果宽带网速不够的情况下,下载是非常的缓慢的。
网友的问题:
- assets文件很大,下载了3个小时。
- Windows版安装包下载速度极慢。
这里,个人建议有3个方式:
- 网盘资源:利用某热心up博主分享的Isaac Sim的各版本和资源包网盘,安装官网文档进行安装。
- 外接硬盘存储:将资源包存放于外置硬盘,避免占用系统盘空间。(可以先下载至外接硬盘中,再解压至Ubuntu中,否则需要占两倍空间,自问自答)
- 科学上网:通过代理工具提升下载速度(已经有网友尝试了,证明十分有效)
2、安装包解压失败
网友的问题:
- 解压Isaac Sim 4.5版本压缩包时提示错误。
- 错误截图显示文件路径层级过深或安全软件拦截。
我找到的解决方式有以下几种:
-
简化路径层级:将压缩包放在浅层目录(如桌面),避免路径过长。(LYC:这写了错误原因 应该就是文件夹套的层数太多了)
-
系统兼容性:优先使用Linux系统(如Ubuntu 20.04/22.04),Windows可能出现兼容问题。
3、驱动安装失败
网友的问题:
- 重装 nvidia-container-toolkit出现这个一般怎么解决?
(解决方法:看着像是网络的问题,需要进行科学上网。 ) - 驱动也安装了,secure boot 也关了,还出现这个,有类是问题吗?
(解决方法:这就是驱动没有装好 。) - 在Ubuntu 22.04内核6.8.0上安装NVIDIA驱动535失败。(有人说需要看卡) Sam:安装后提示驱动不兼容,程序崩溃。
解决方法:
1、Ubuntu 直接用指令, 4060 可以到 550,通过APT安装:执行sudo apt install nvidia-driver-535。(HawkChen)
2、检查内核兼容性:确保驱动版本与内核匹配,必要时降级内核或驱动。
3、禁用Secure Boot:在BIOS中关闭Secure Boot功能。
- 安装后提示驱动不兼容,程序崩溃。
解决方法:
1、更新驱动:通过NVIDIA官网下载最新驱动(Sam更新驱动后解决)
2、验证CUDA版本:确保CUDA版本与Isaac Sim要求匹配(官方文档推荐CUDA 12.x)。
4、容器安装权限问题
网友的问题:在Linux上用容器安装Isaac Sim时提示权限错误。
解决方法:
-
Docker权限:将用户加入
docker组并重启服务(sudo usermod -aG docker $USER)。 -
SELinux/AppArmor:临时禁用或配置策略允许容器运行(需谨慎操作)。
5、ROS桥接通信失败
网友的问题: 在WSL2中配置ROS桥接后,Isaac Sim无法与ROS节点通信。
解决方法:
-
网络配置:确保WSL2与Windows主机防火墙允许ROS端口通信(默认11311)。
-
使用物理机:推荐在Ubuntu物理机中运行ROS(LYC验证双系统更稳定)。
6、Linux权限不足
网友的问题: Ubuntu安装时提示权限拒绝,无法写入目录。
解决方法:
-
使用
sudo:以管理员权限运行安装命令(需谨慎)。 -
目录权限:修改目标目录权限(
chmod 777 /target/path)。
7、容器网络异常
网友的问题: Docker容器内Isaac Sim无法连接外部服务(如ROS Master)。
解决方法:
-
网络模式:启动容器时使用
--network=host模式(共享主机网络)。 -
端口映射:手动映射ROS所需端口(如
-p 11311:11311)。
8、WSL环境问题
网友的问题:"WSL下的Linux安装是否可行?" 或者 "WSL的Linux有成功的嘛?"
解决方法:
-
不推荐WSL:GPU直通支持有限,建议双系统或物理机安装(热心网友建议:虚拟机可能无法调用独显)。
-
双系统方案:为Windows分配独立分区安装Ubuntu,避免依赖WSL。
9、Isaac Sim程序启动卡顿或无响应
网友的问题:启动后卡在加载界面,提示安全软件冲突。
解决方法:
-
检查硬件配置:确保GPU驱动为最新版本(XX网友提到驱动更新后解决)。
-
关闭安全软件:关闭防火墙或杀毒软件(有网友验证有效)。
10、系统兼容性问题
网友的问题:
- 有云端部署的方法不?或者Mac?
- Ubuntu 24.04是否兼容?
- Windows安装失败,是否必须用Linux?
解决方法:
-
推荐系统:优先使用Ubuntu 20.04/22.04(某大佬确认兼容性最佳)。
-
Windows限制:Windows可能出现兼容问题,建议双系统或Linux环境(某大佬何琨-Ken:Windows下ROS配置复杂)【注意:有时候也安装的了,实在安装不了就先放弃把】
11、非RTX显卡支持
网友的问题:
- Tesla T4卡能用在Isaac吗?
解决方法:不能 ,详细请见以下链接。ISAAC Sim 要求 — ISAAC Sim 文档 --- Isaac Sim Requirements — Isaac Sim Documentation https://docs.isaacsim.omniverse.nvidia.com/latest/installation/requirements.html
https://docs.isaacsim.omniverse.nvidia.com/latest/installation/requirements.html - MacBook是否支持?我没有NVIDIA显卡。
解决方法:使用替代方案,租用云服务器(有大佬推荐阿里云A10实例)。
12、多系统引导丢失
网友的问题:
- 装双系统后Ubuntu引导消失。
- GRUB修复失败,无法进入系统
解决方法:
- 工具修复:使用boot-repair工具:
sudo add-apt-repository ppa:yannubuntu/boot-repair && sudo apt install boot-repair - U盘启动:通过Live USB执行
grub-install和update-grub。
13、安装包双击无反应
网友的问题:
- 我部署lerobot搞完了…ubuntu还是好顺,debian的…是不是命令不一样…输入安装没反应[苦涩]
解决方法:
- 无直接回答,但后续讨论提到需检查权限和网络:
"可能要耐心等一下"
"右下好像有个加载进度条"
14、虚拟机安装配置问题
网友的问题:请问在虚拟机里下载要配置给虚拟机什么样的配置呀?
目前,不推荐虚拟机,据说虚拟机会难搞。
15、机械臂模型兼容性
网友的问题: Isaac Sim中机械臂模型报Lula相关错误。
解决方法:
-
检查模型配置:确保URDF文件与Isaac Sim版本兼容(需调整关节参数)。
-
官方示例参考:从Isaac资产库导入标准模型(使用内置工厂场景测试)。
16、Docker容器安装失败
网友们的抱怨:
- 我也一样,一气之下直接装在windows上了
- 请问我到这里一步报错怎么办啊
解决方法:
- 我没用过docker环境安装,但127.0.0.1可能不对
- 这个无需理会,一次性的报错不影响使用
17、多显卡配置无效
网友的问题: 双显卡笔记本(如RTX 4060 + 核显)无法调用独显运行Isaac Sim。
解决方法:
-
强制指定GPU:在NVIDIA控制面板中设置Isaac Sim默认使用独显。
-
Linux配置:使用
prime-run命令启动程序(仅限Linux)。
3、其他的注意点
1、NVIDIA isaac课程访问缓慢
热心建议:
-
直接访问:DLI课程无需科学上网,但加载较慢,建议使用Chrome/Firefox浏览器。
-
耐心等待:首次访问需加载课程资源,避免频繁刷新。
-
分阶段科学上网:首次访问需科学上网,后续浏览可关闭(某网友验证有效)。
2、Windows安装路径错误
热心建议:
-
路径规范:使用全英文路径(如
C:\IsaacSim)。 -
权限提升:右键安装包 → 以管理员身份运行。
-
系统兼容:禁用Windows Defender实时保护。
最低要求:必须使用显存≥8G的GPU(如RTX 3060 12G、RTX 4060Ti 16G等)。
推荐配置:建议使用RTX 4090(16G)或更高性能显卡以获得流畅体验。
更多问题请打开这个链接:
最新问题汇总整理![]() https://zhuanlan.zhihu.com/p/29939886037
https://zhuanlan.zhihu.com/p/29939886037
三、造化玉牒精要
1、实践环节:
1、在解压包的文件路径下,打开命令行终端,并输入post_install.bat
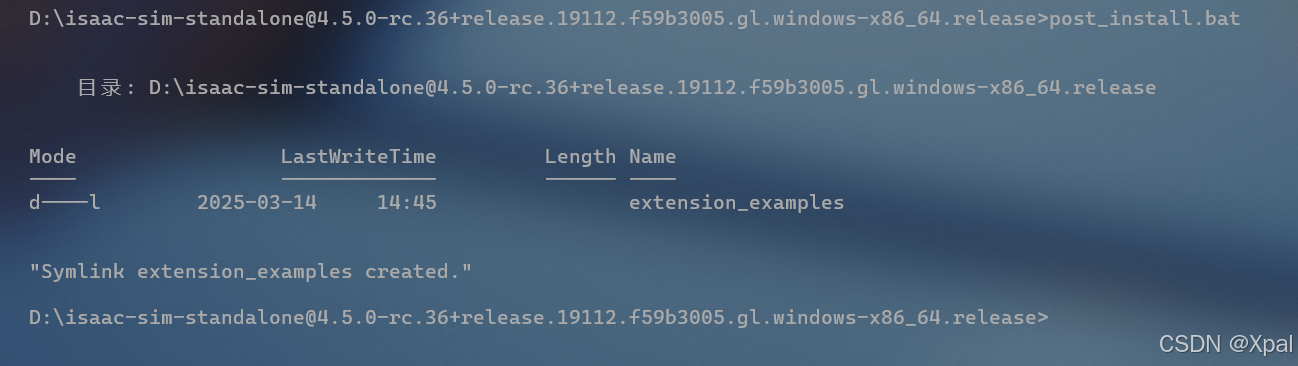
2、当这个命令运行后,再次输入一个命令isaac-sim.selector.bat
3、点击START,然后再等待几分钟,资产库正在进行初始化...
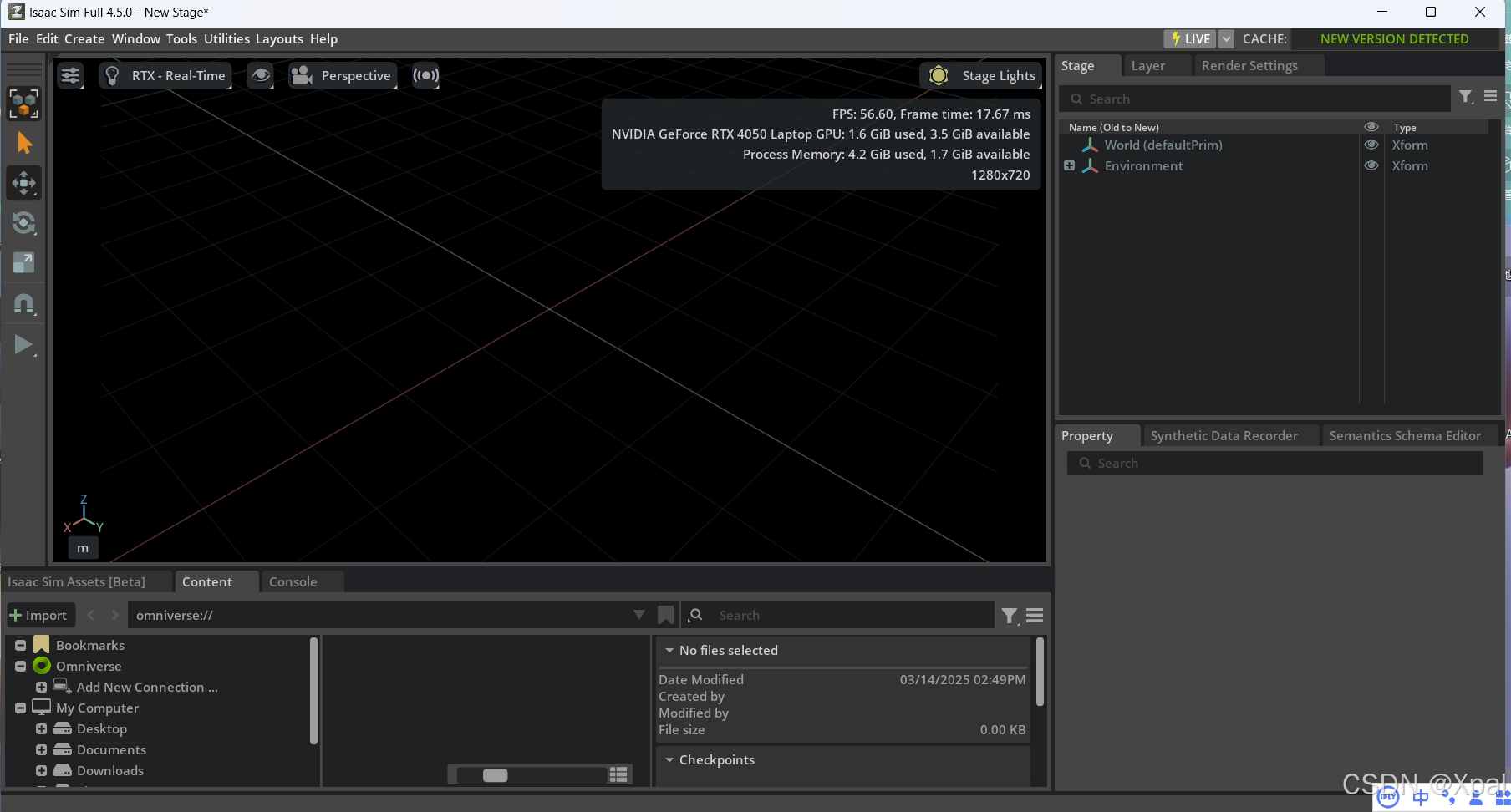 这就是Isaac Sim的初始界面,这个界面其实和Blender、Zbrush真的很像,但是它提供的工具资产包、模型样例实在很多,可以做的事情不只是构建模型、创建3D动画、游戏等等。
这就是Isaac Sim的初始界面,这个界面其实和Blender、Zbrush真的很像,但是它提供的工具资产包、模型样例实在很多,可以做的事情不只是构建模型、创建3D动画、游戏等等。
【注意】:请不要关闭两个终端界面,这样会导致Isaac Sim突然卡死的。
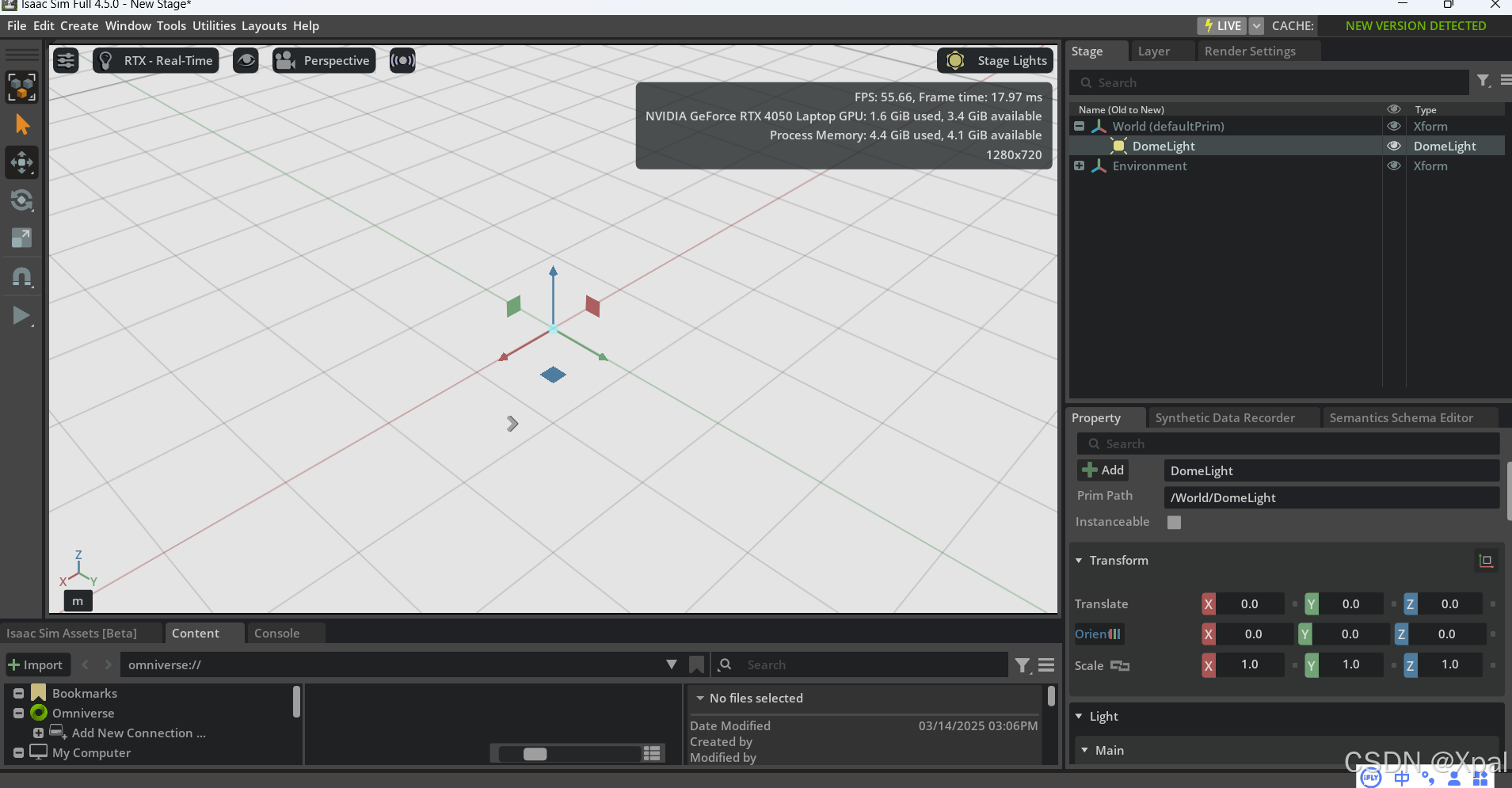
2、展示一个小demo:
3、学习感受:
感受就是入门时,对于拖拽资产文件不是很轻松,调摄像头也是一个问题,其他的话个人觉得都挺好的。
后期学习路径:
-
短期目标
-
完成NVIDIA官方认证课程《ISAAC SIM FOR ROS DEVELOPERS》
-
开发自定义OmniGraph节点实现抓取动作生成
-
-
长期目标
-
构建基于Isaac Sim的云端仿真农场
-
探索结合Replicator的AIGC数据生成管线
-


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









