







1、硬件设计: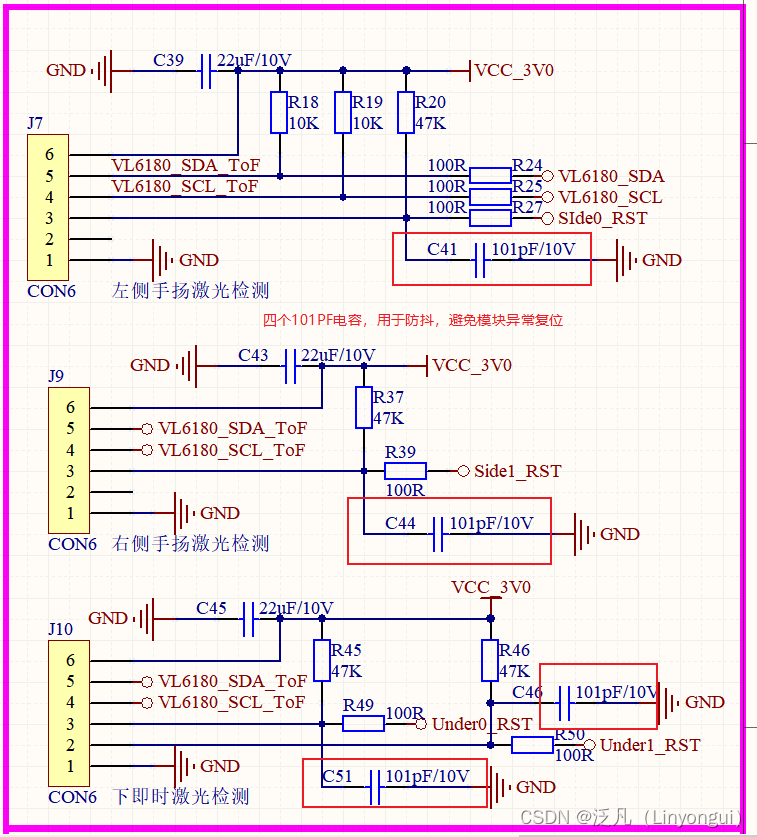
2、代码实现
项目主控使用的是ESP32S3,直接使用了库文件:vl6180x-arduino-master 进行实现,具体如下:
2.1、创建一个结构体,用于保存各个激光探头的数据,及相关需要用到的参数,如状态等
//激光探头信息
typedef struct
{
uint8_t tof0_action = 80; //0#激光(右),感应阈值
uint8_t tof1_action = 80; //1#激光(左),感应阈值
uint8_t tof2_action = 100; //2#激光(下),感应阈值
uint8_t tof3_action = 100; //3#激光(下),感应阈值
uint8_t ignore_dis = 10; //盲区距离设置
uint8_t result_garbage; //垃圾处理器动作
uint8_t result_shark; //手扬开关水动作
uint8_t result_real; //即时开关水动作
uint8_t result_unlock_real; //即时开关水解锁动作
} tof_message;
tof_message tofs;2.2、多从机模式下的参数配置
//多从机模式下 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









