






结合数字孪生与计算机视觉的迷宫导航案例,利用Matlab仿真验证机器人的运动结果。
我们衷心感谢Chinmay Amrutkar的宝贵贡献,感谢他在GitHub上公开了他的工作。我们也要感谢亚利桑那州立大学的机器人实验室对这个项目的发展所做的贡献。
产品
柔性协作机器人myCobot Pro 630利用更大的工作空间,完美融入生产环境,基于精确动态模型的防碰撞检测功能,使其能够与人很好地协同工作。

介绍
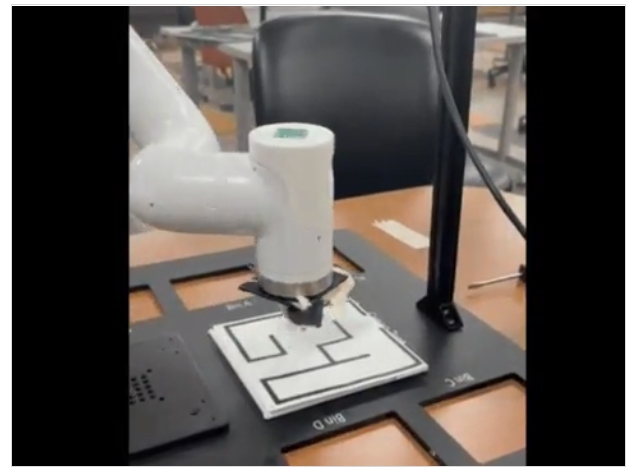
在这个项目中,我们将使用数字孪生技术控制机械臂myCobot Pro 630,利用计算机视觉进行迷宫导航。将使用图像捕获、图像处理和迷宫路径求解的方法。该解决方案将被转换为机器人手臂可以识别的轨迹,从而通过协作手臂myCobot Pro 630实现自动导航。
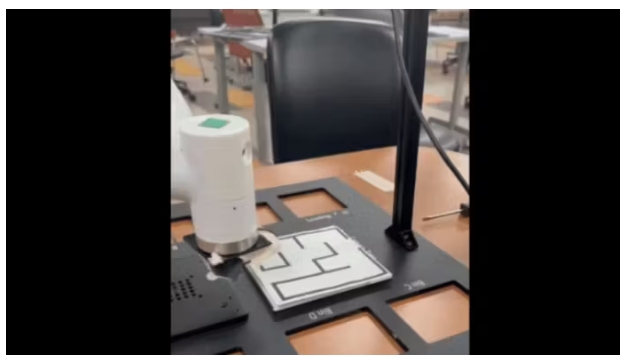
项目设置
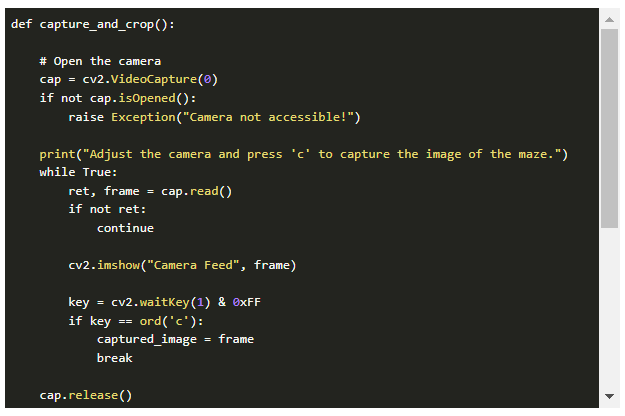
1. 捕获和裁剪迷宫图像
首先,使用‘cv2 ’。videoccapture '功能,从相机捕捉实时图像。用户需要按下“c”键来捕捉迷宫的图像,然后手动选择需要裁剪的区域。
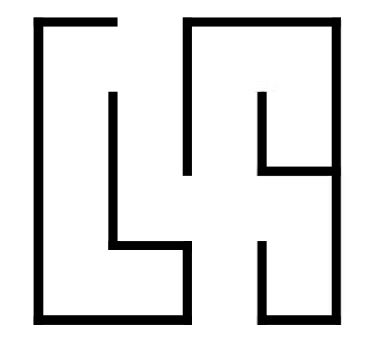
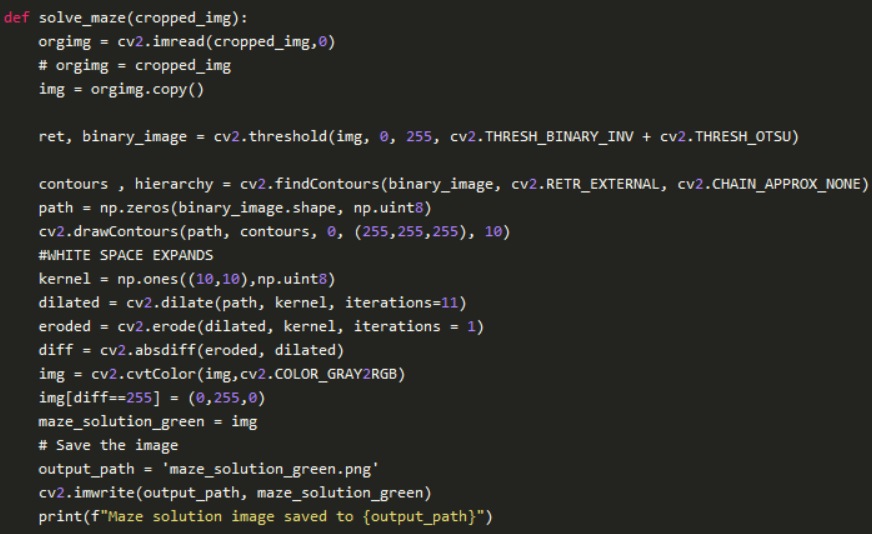
2. 解决迷宫问题
利用OpenCV中的阈值和轮廓检测等计算机视觉算法,可以得到迷宫图像的关键几何特征。将迷宫图像处理成二值图像,并通过侵蚀和扩张操作提取有效路径。最后得到迷宫解,用绿色高光标记。
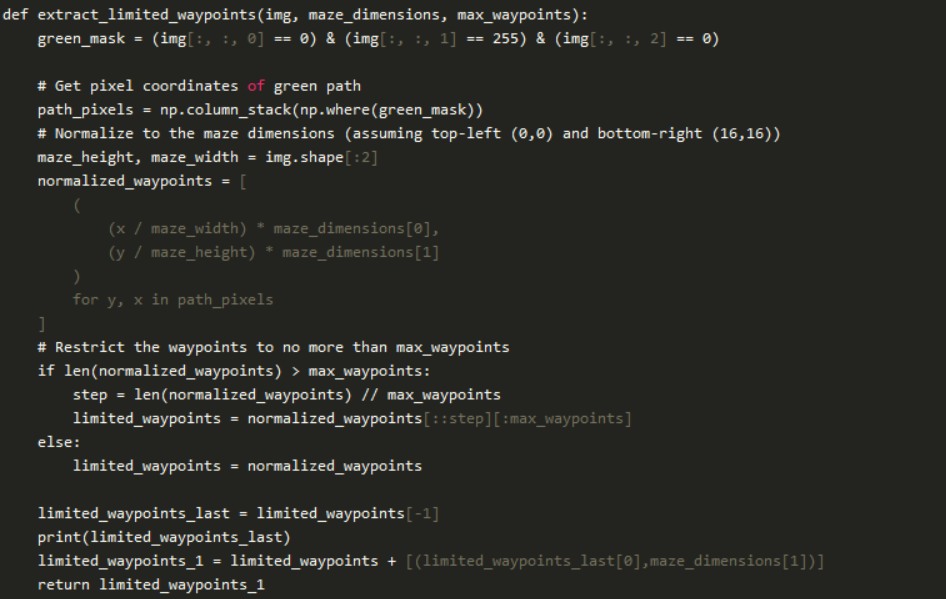
3. 提取锚点
为了保证机械臂的平稳运动,我们从迷宫解中提取路径点,并根据迷宫的尺寸限制路径点的最大数量。这确保了路径点仍然是可管理的,并且不会过多。
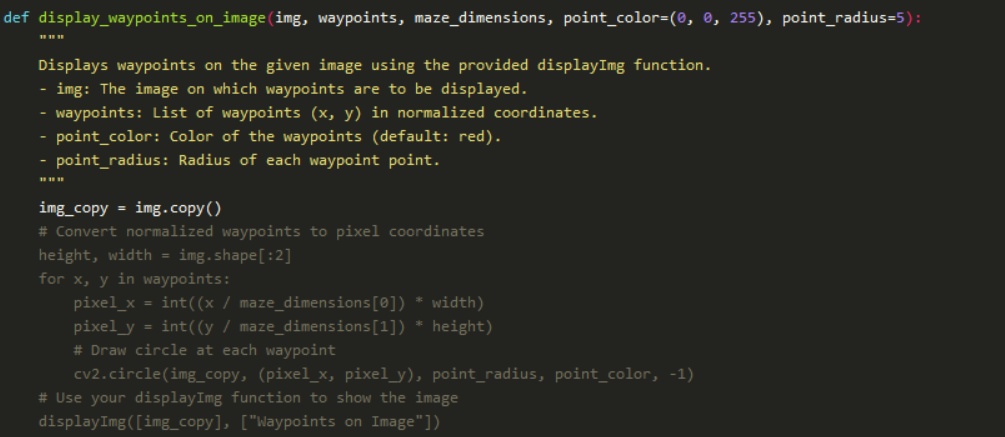
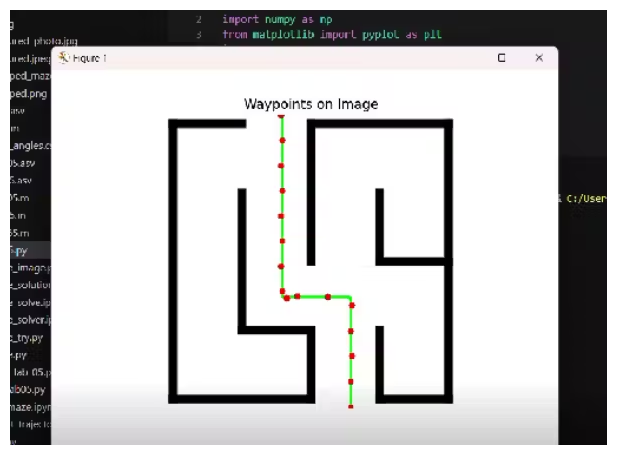
4.验证路点
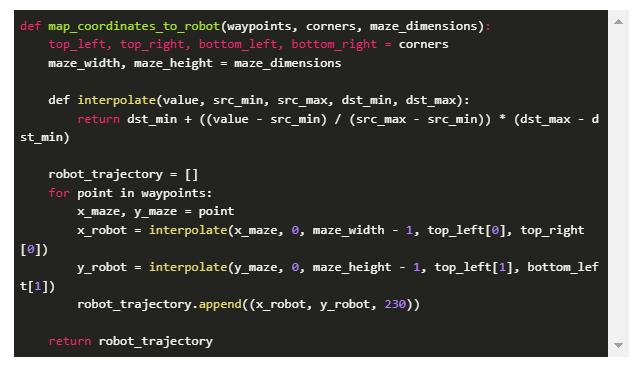
5. 将坐标映射到机械臂的坐标系统
利用线性插值将迷宫路径点映射到机械臂的坐标系中,使cobot myCobot Pro 630能够根据计算的轨迹移动。
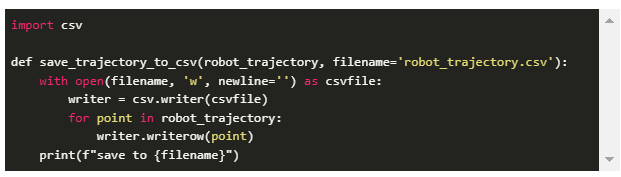
6. 将轨迹保存为CSV
计算出的机器人轨迹保存到CSV文件中,供以后导入和执行。
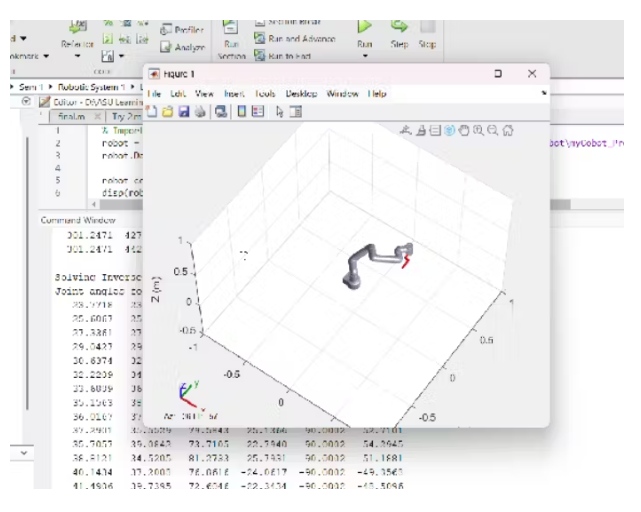
7. 在Matlab中运行轨迹
我们可以使用Matlab进行仿真,验证得到的机械臂位姿是否正确可行,然后驱动机械臂进行运动。
总结
本案例演示了如何使用机器人手臂myCobot Pro 630和数字孪生技术实现迷宫导航。可以根据具体需求进行进一步优化,例如添加实际的机器人控制和路径执行。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









