







1075 Thread in a space
/*************************************************************************
> File Name : 1075Therad_in_a_Space.cpp
> Author : liudy
> Mail : 787896130@qq.com
> Created Time: 2016年08月09日 星期二 09时03分54秒
************************************************************************/
#include<iostream>
#include<cmath>
#include<cstdio>
#include<iomanip>
using namespace std;
/*
*
*可知 设 A(x1, y1, z1), B(x2, y2, z2), C(x3, y3, z3);
*空间直线AB: x = (x2-x1)t + x1; y = (y2-y1)t + y1; z = (z2-z1)t + z1
*球: (x-x3)^2 + (y-y3)^2 + (z-z3)^2 = R^2
*将直线AB代人球方程看是否有解,有解,则求出焦点 E(x4, y4, z4), F(x5, y5, z5), 无解则最短距离为AB两点的距离
*首先判断 点 E, F 是否在AB之间,如果不在 最短距离仍为 AB两点之间的距离
*焦点在AB 之间,
* 见下图
*/
struct Point{
double x;
double y;
double z;
Point(double x1 = 0, double y1 = 0, double z1 = 0){
x = x1;
y = y1;
z = z1;
}
};
Point *P[3];
Point *cross_point[2];
const double Pi = 3.1415;
double dis(Point *A, Point *B){
return sqrt(pow(A->x - B->x, 2) + pow(A->y - B->y, 2) + pow(A->z - B->z, 2));
}
double Get_3P_Angle(Point *A, Point *B, Point *C);
/*
* 检查C点是否在AB之间
*/
bool check_Point_Between_AB(Point *C, Point *A, Point *B){
double k, angle;
k = dis(A, C) / dis(A, B);
angle = Get_3P_Angle(C, B, A);
if(k >= 1 || angle != 0)
return false;
return true;
}
bool check_cross(int R){
/*
* a = (x2 - x1)^2 + (y2 - y1)^2 + (z2 - z1)^2
* b = 2(x2 - x1)(x1 - x3) + 2(y2 - y1)(y1 - y3) + 2(z2-z1)(z1-z3)
* c = (x1 - x3)^2 + (y1 - y3)^2 + (z1 - z3)^2
*/
double a = (P[1]->x - P[0]->x) * (P[1]->x - P[0]->x) + (P[1]->y - P[0]->y) * (P[1]->y - P[0]->y) + (P[1]->z - P[0]->z) * (P[1]->z - P[0]->z);
double b = 2 * (P[1]->x - P[0]->x) * (P[0]->x - P[2]->x) + 2 * (P[1]->y - P[0]->y) * (P[0]->y - P[2]->y) + 2 * (P[1]->z - P[0]->z) * (P[0]->z - P[2]->z);
double c = (P[0]->x - P[2]->x) * (P[0]->x - P[2]->x) + (P[0]->y - P[2]->y) * (P[0]->y - P[2]->y) + (P[0]->z - P[2]->z) * (P[0]->z - P[2]->z) - pow(R, 2);
double delt = b * b - 4 * a * c;
if(delt >= 0){
double t1, t2;
Point *cross_Point = new Point();
t1 = (-b + sqrt(delt)) / (2 * a);
t2 = (-b - sqrt(delt)) / (2 * a);
cross_Point->x = (P[1]->x - P[0]->x) * t1 + P[0]->x;
cross_Point->y= (P[1]->y - P[0]->y) * t1 + P[0]->y;
cross_Point->z = (P[1]->z - P[0]->z) * t1 + P[0]->z;
if(check_Point_Between_AB(cross_Point, P[0], P[1]))
return true;
else
return false;
}else
return false;
}
double Arc_length(double Angle, double R){
return R * Pi * Angle / 180.0;
}
/*
* 直角三角形中知斜边 邻边求角度
* L1 为垂直边, L2 为斜边
*/
double Get_Angle(double L1, double L2){
double cosAngle, Angle;
cosAngle = L1 / L2;
Angle = acos(cosAngle);
return Angle * 180.0 / Pi;
}
/*
*知三个点,求所成的角 角ACB
*其中C为顶点
*/
double Get_3P_Angle(Point *A, Point *B, Point *C){
double DotProduct, ModProduct, cosAngle, Angle;
DotProduct = (A->x - C->x) * (B->x - C->x) + (A->y - C->y) * (B->y - C->y) + (A->z - C->z) * (B->z - C->z);
ModProduct = sqrt(pow(A->x - C->x, 2) + pow(A->y - C->y, 2) + pow(A->z - C->z, 2)) * sqrt(pow(B->x - C->x, 2) + pow(B->y - C->y, 2) + pow(B->z - C->z, 2));
cosAngle = DotProduct / ModProduct;
Angle = acos(cosAngle);
// cout << "Angle = " << Angle << " DotProduct = " << DotProduct << " ModProduct = " << ModProduct << endl;
return Angle * 180.0 / Pi;
}
/*
*直角三角形知斜边a, 和一条直角边 b, 求第三条边长c
*
*/
double Get_Triangle_len(double a, double b){
return sqrt(a * a - b * b);
}
double Calculate_Len(double R){
double AngleACE, AngleBCF, AngleACB;
double Arc_len;
AngleACB = Get_3P_Angle(P[0], P[1], P[2]);
AngleACE = Get_Angle(R, dis(P[0], P[2]));
AngleBCF = Get_Angle(R, dis(P[1], P[2]));
Arc_len = Arc_length(AngleACB - AngleACE - AngleBCF, R);
// cout << "AngleACE = " << AngleACE << " AngleACB = " << AngleACB << " AngleBCF = " << AngleBCF << endl;
// cout << "Arc_len = " << Arc_len << endl
return Get_Triangle_len(dis(P[1], P[2]), R) + Get_Triangle_len(dis(P[0], P[2]), R) + Arc_len;
}
void solve(int R){
if(check_cross(R)){
double Ans;
Ans = Calculate_Len(R);
// cout << "Ans = " << Ans << endl;
cout << fixed << setprecision(2) << Ans << endl;
}else{
// cout << "Dis = " << dis(P[0], P[1]) << endl;
cout << fixed << setprecision(2) << dis(P[0], P[1]) << endl;;
}
}
int main(){
double x, y, z, r;
for(int i = 0; i < 3; i++){
cin >> x >> y >> z;
P[i] = new Point(x, y, z);
}
cin >> r;
solve(r);
return 0;
}我们知道在三维空间中 三个不共线的点 可以确定一个平面, 平面CAB 可将球切成如图的一个圆.其中CE, BD 为切线
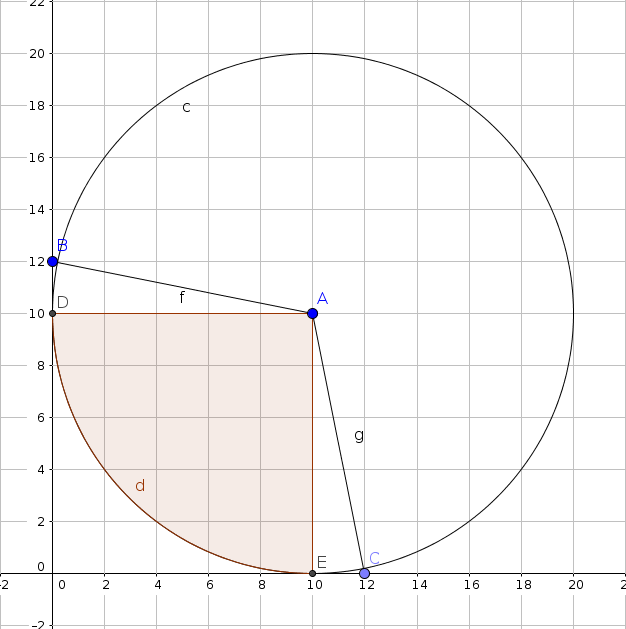
由图可知所需求的长度为 CE + 弧ED + DB 的长度
我们知 三角形 ADB, ACE 都为直角三角形,并且 由两点的距离公式可知道 AC, AB 长度, 所以由勾股定理可求得CE, DB;
并且 由 cosCAE = AE / AC , 可求得 角CAE, 角BAD 的大小
由向量AB 和 向量AC 可求得 角BAC 的大小
所以 角DAE = 角BAC - 角BAD - 角EAC ; 知道角DAE 便可求出弧长ED;














 1363
1363











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









