







https://blog.csdn.net/MDreamlove/article/details/80333136
https://blog.csdn.net/liuchaoxuan/article/details/80767228?utm_source=blogxgwz7
https://blog.csdn.net/qq_36520235/article/details/82417949
https://www.jianshu.com/p/8324a34577a0?utm_source=oschina-app
https://www.cnblogs.com/stevenczp/p/7028071.html

hashMap为何采用hash表存数据?
如果不用hash表,集合中数据是无序的,当我们向集合中添加一个数据时需要同集合中所有的数据进行equals比较,当集合数据比较大时效率是非常的低。因此用hash表存储数据效率非常高。
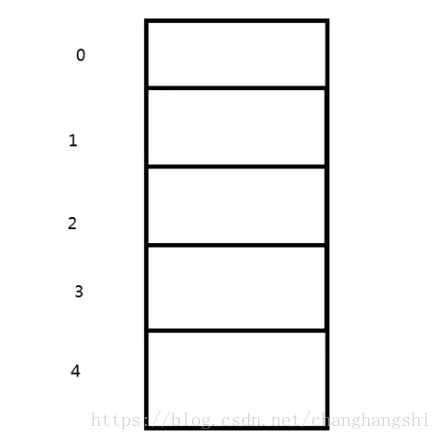
hash表的底层是数组,数组中存的是entry对象,默认长度是16
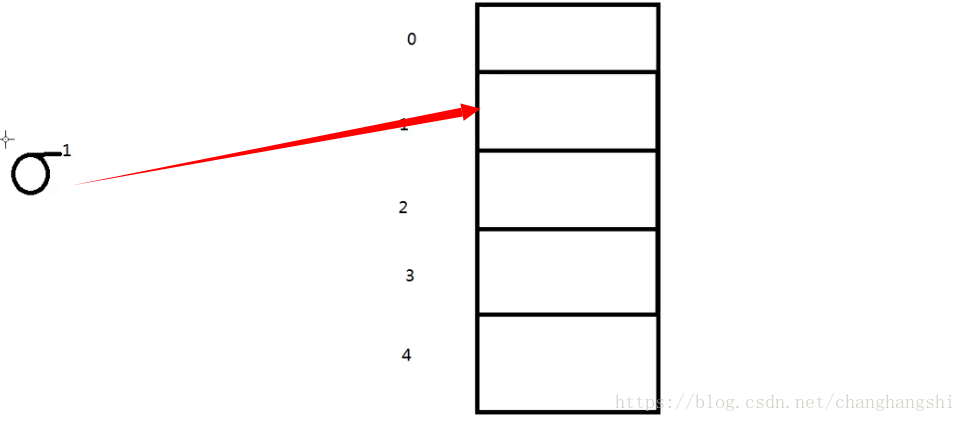
当我们往hash表中添加一个对象时,会调用对象的hash code方法,根据hash算法算出对应的数组的索引值,再根据索引值查找数组,数组中是否存在对象,如果不存在对象直接存进去。
如果存在对象,则通过equals比较两个对象的key值是否相等,如果key相等则覆盖value值。
如果key不相等则形成链表结构,jdk1.7中后加入数据放在链表的前面,先加的数据在链表中下移,这种情况叫碰撞。
这种碰撞的情况应尽量避免,否则在一个数组的索引对应的链表中保存大量key不相同的数据时,该索引当再次插入一个对象时equals比较全部影响效率。这时我们将equals和hashcode方法重写的严谨点,这种还是避免不了,因为数组的索引值有限。因此hashMap提供了加载因子避免碰撞,默认0.75,当元素到达现有的hash表的75%时扩容。一旦扩充就会重新排序hash表,减少碰撞概率。
但是这两种方法还是避免不了这种碰撞的情况,就会出现查询一个对象可能出现极端情况查询链表的最后一个数据返回,影响查询效率。比如在极端情况下成百上千个数据在hash时发生碰撞,这百上千个数据都保存在一个链表中,那么如果要查找其中的一个数据,那就不可避免的要花费O(n)的查找时间,这将是多大的性能损失。
JDK1.7中使用一个Entry数组来存储数据, 用key的hashcode取模来决定key会被放到数组里的位置,如果hashcode相同, 或者hashcode取模后的结果相同(hash collision), 那么这些key会被定位到Entry数组的同一个格子里,这些key会形成一个链表。
在hashcode特别差的情况下,比方说所有key的hashcode都相同,这个链表可能会很长,那么put/get操作都可能需要遍历这个链表 也就是说时间复杂度在最差情况下会退化到O(n)
因此jdk1.8改善这种碰撞情况的出现,jdk1.8中的HashMap存储结构是由数组、链表、红黑树这三种数据结构形成,红黑树查询删除快新增慢。存储结构下图所示,根据key的hash与table[数组]长度确定数组的table位置,同一个位置的key以链表形式存储,超过一定限制 链表转为树。
数组的具体存取规则是tab[(n-1) & hash], 其中tab为node数组,n为数组的长度,hash为key的hash值。
1)表中数据的临界值,如果达到8,就进行resize扩展,如果数组大于64则转换为树.
static final int TREEIFY_THRESHOLD = 8;
2)如果数组的size大于64,则把链表进行转化为树static final int MIN_TREEIFY_CAPACITY = 64


JDK1.8 HashMap:一些重要的变量
//默认初始容量16
static final int DEFAULT_INITIAL_CAPACITY = 1 << 4;
//容量最大值
static final int MAXIMUM_CAPACITY = 1 << 30;
//默认加载因子0.75
static final float DEFAULT_LOAD_FACTOR = 0.75f;
//树化的阈值,当桶中链表节点数大于8时,将链表转换为红黑树
static final int TREEIFY_THRESHOLD = 8;
//红黑树退化为链表的阈值,当桶中红黑树节点数小于6时,将红黑树转换为链表
static final int UNTREEIFY_THRESHOLD = 6;
//最小的树化容量,进行树化的时候,还有一次判断,只有键值对数量大于64时才会发生转换,
//这是为了避免在哈希表建立初期,多个键值对恰好被放入了同一个链表而导致不必要的转化
static final int MIN_TREEIFY_CAPACITY = 64;
get操作:get(K)
1.判断表是否为空或者待查找的桶不为空
2.首先检查待查找的桶的第一个元素是否是要找的元素,如果是直接返回
3.若桶内红黑树,则调用getTreeNode()查找红黑树
4.若桶内是链表,遍历链表寻找节点
public V get(Object key) {
Node<K,V> e;
return (e = getNode(hash(key), key)) == null ? null : e.value;
}
final Node<K,V> getNode(int hash, Object key) {
Node<K,V>[] tab; Node<K,V> first, e; int n; K k;
//表不为空&&表长大于0&&待查找的桶不为空
if ((tab = table) != null && (n = tab.length) > 0 &&
(first = tab[(n - 1) & hash]) != null) {
//首先检查桶中的第一个节点,如果相等,则直接返回
if (first.hash == hash && // always check first node
((k = first.key) == key || (key != null && key.equals(k))))
return first;
if ((e = first.next) != null) {
//如果桶中是树结构
if (first instanceof TreeNode)
return ((TreeNode<K,V>)first).getTreeNode(hash, key);//若桶内红黑树,则调用getTreeNode()查找红黑树
//桶中是链表,则遍历链表如果找到则直接返回
do {
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
return e;
} while ((e = e.next) != null);
}
}
return null;
}
put操作:put(K,V)

1.如果表为空或者表的长度为0,调用resize初始化表,为表分配空间
2.①二次散列处的桶为空,直接插入元素
②桶不为空
a)桶处的第一个节点与待插入节点的哈希相同且key“相等”,直接赋给变量e
b)桶中是红黑树,调用putTreeVal插入红黑树中
c)桶中是链表,遍历链表,如果其中存在相同的key,则赋给变量e;不存在则尾插法加入链表,并判断节点数是否大于8,如果大于8则调用treeifyBin()转化为红黑树
3.①e不为空,替换其中的value值,并返回旧的value值
②e为空,表大小+1,判断是否达到了阈值,如果达到了则需要扩容
public V put(K key, V value) {
return putVal(hash(key), key, value, false, true);
}
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
boolean evict) {
Node<K,V>[] tab; Node<K,V> p; int n, i;
//如果表为空或者表的容量为0,resize初始化表
if ((tab = table) == null || (n = tab.length) == 0)
n = (tab = resize()).length;
//根据hash得到在表中索引位置的桶,如果桶为空,则将节点直接插入桶中
if ((p = tab[i = (n - 1) & hash]) == null)
tab[i] = newNode(hash, key, value, null);
//桶不为空
else {
Node<K,V> e; K k;
//首先判断桶中第一个节点的hash与待插入元素的key的hash值是否相同且key是否"相等",如果相等,赋给变量e
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
e = p;
//是树节点,则调用putTreeVal添加到红黑树中
else if (p instanceof TreeNode)
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
//否则是链表,遍历链表,如果不存在相同的key,则插入链表尾部,并且判断节点数量是否大于树化阈值,如果大于则转换为红黑树;如果存在相同的key,break,遍历链表结束
else {
for (int binCount = 0; ; ++binCount) {
if ((e = p.next) == null) {
p.next = newNode(hash, key, value, null);
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
treeifyBin(tab, hash);
break;
}
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
break;
p = e;
}
}
//e不为空表示存在相同的key,替换value并返回旧值
if (e != null) { // existing mapping for key
V oldValue = e.value;
if (!onlyIfAbsent || oldValue == null)
e.value = value;
afterNodeAccess(e);
return oldValue;
}
}
++modCount;
//链表元素增加,并判断是否大于阈值,如果大于,则扩容
if (++size > threshold)
resize();
afterNodeInsertion(evict);
return null;
}
链表转化为红黑树:treeifyBin()
final void treeifyBin(Node<K,V>[] tab, int hash) {
int n, index; Node<K,V> e;
//如果表为空或者表的长度小于树化的容量,resize()扩容而不是树化
if (tab == null || (n = tab.length) < MIN_TREEIFY_CAPACITY)
resize();
else if ((e = tab[index = (n - 1) & hash]) != null) {
//hd是转换为树节点后桶中的头节点 tl记录上一个遍历的节点
TreeNode<K,V> hd = null, tl = null;
do {
//将hash位置处的桶中的每个节点包装成树节点,p记录当前遍历的节点
TreeNode<K,V> p = replacementTreeNode(e, null);
if (tl == null)
hd = p;
else {
p.prev = tl;
tl.next = p;
}
tl = p;
//循环将桶中每个节点替换为树节点,最终结果就是链表转换为双向链表,prev指向前一个节点,next指向后一个节点
} while ((e = e.next) != null);
if ((tab[index] = hd) != null)
//将双向链表转化为红黑树
hd.treeify(tab);
}
}
扩容操作:resize()
该方法进行表的初始化或者扩容操作
其中扩容操作并没有进行重哈希计算桶中元素在新表中的位置,而是根据原位置+数组长度/不+数组长度确定其在新表中的位置,即省去了计算hash的时间,而且同时,由于新增的1bit是0还是1可以认为是随机的,因此resize的过程,均匀的把之前的冲突的节点分散到新的bucket了。这一块就是JDK1.8新增的优化点。
(e.hash & oldCap) 得到的是元素的在新数组中的位置是否需要移动
e.hash & (oldCap - 1)得到的是元素在原数组中的位置,那么 e.hash & oldCap计算的就是e.hash的高一位,因为oldCap*2 = newCap,计算e.hash & (newCap - 1)得到的就是在新数组中的位置,与旧表中的位置计算相比,差别就是最高位,所以通过e.hash & oldCap计算最高位,判断是否需要移动
eg:
e.hash = 10 ———— 0000 1010
oldCap = 16 ———— 0001 0000 比较高位的第一位0
& = 0 ———— 0000 0000
结论:元素位置在扩容后数组中的位置没有发生改变
e.hash = 17 ———— 0001 0001
oldCap = 16 ———— 0001 0000 比较高位的第一位 1
& = 1 ———— 0001 0000
结论:元素位置在扩容后数组中的位置发生了改变,新的下标位置是原下标位置+原数组长度
元素在重新计算hash之后,因为n变为2倍,那么n-1的mask范围在高位多1bit(红色),因此新的index就会发生这样的变化:
因此,我们在扩充HashMap的时候,不需要像JDK1.7的实现那样重新计算hash,只需要看看原来的hash值新增的那个bit是1还是0就好了,是0的话索引没变,是1的话索引变成“原索引+oldCap”,可以看看下图为16扩充为32的resize示意图:
final Node<K,V>[] resize() {
Node<K,V>[] oldTab = table;
//旧表的容量
int oldCap = (oldTab == null) ? 0 : oldTab.length;
//旧的阈值
int oldThr = threshold;
//记录新表的容量大小和阈值
int newCap, newThr = 0;
//旧表容量大于0,表示被初始化过,需要执行的是扩容操作
if (oldCap > 0) {
//如果旧表容量大于容量最大值,那么阈值为Interger的最大值,即提升阈值,不再进行扩容,返回旧表
if (oldCap >= MAXIMUM_CAPACITY) {
threshold = Integer.MAX_VALUE;
return oldTab;
}
//否则,扩容为原先容量的1倍,阈值也扩容为原来的一倍
else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
oldCap >= DEFAULT_INITIAL_CAPACITY)
newThr = oldThr << 1; // double threshold
}
//oldCap不大于0,表示该表未被初始化,需要进行初始化,需要确认表的大小及阈值
//旧表容量为0,阈值大于0,则用阈值大小作为容量
else if (oldThr > 0) // initial capacity was placed in threshold
newCap = oldThr;
//否则,表的容量为默认初始容量16,阈值为默认初始容量16*加载因子0.75
else { // zero initial threshold signifies using defaults
newCap = DEFAULT_INITIAL_CAPACITY;
newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);
}
//如果新表阈值为0,则利用新容量*加载因子计算
if (newThr == 0) {
float ft = (float)newCap * loadFactor;
newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
(int)ft : Integer.MAX_VALUE);
}
//将新的阈值赋给HashMap的阈值成员变量
threshold = newThr;
@SuppressWarnings({"rawtypes","unchecked"})
//新建数组,大小为newCap
Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];
//将新建的表赋给HashMap的表成员变量
table = newTab;
//如果旧表不为空,则需要进行扩容
if (oldTab != null) {
//变量旧表中的每一个桶
for (int j = 0; j < oldCap; ++j) {
Node<K,V> e;
//将不为空的桶重hash到新表中
if ((e = oldTab[j]) != null) {
oldTab[j] = null;
//桶中只有一个元素,将该元素放到新表的桶中
if (e.next == null)
newTab[e.hash & (newCap - 1)] = e;
//桶中存放的是红黑树,复杂这里不做讲解
else if (e instanceof TreeNode)
((TreeNode<K,V>)e).split(this, newTab, j, oldCap);
//桶中存放的是链表
//并没有进行
else { // preserve order
//根据变化的最高位的不同,也就是0或者1,将链表拆分开
Node<K,V> loHead = null, loTail = null;
Node<K,V> hiHead = null, hiTail = null;
Node<K,V> next;
do {
next = e.next;
//最高位为0,则将节点加入loTail.next
if ((e.hash & oldCap) == 0) {
if (loTail == null)
loHead = e;
else
loTail.next = e;
loTail = e;
}
//最高位为1,则将节点加入hiTail.next
else {
if (hiTail == null)
hiHead = e;
else
hiTail.next = e;
hiTail = e;
}
} while ((e = next) != null);
//在新数组的位置与原数组的位置相同,新数组的桶直接指向LoHead
if (loTail != null) {
loTail.next = null;
newTab[j] = loHead;
}
//在新数组的位置是原数组的位置+旧数组长度,新数组的桶直接指向hiHead
if (hiTail != null) {
hiTail.next = null;
newTab[j + oldCap] = hiHead;
}
}
}
}
}
//返回扩容后的新数组或者初始化后的数组
return newTab;
}















 117
117











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









