







weak_ptr 是为了辅助shared_ptr而引入的一种智能指针,它存在的意义就是协助shared_ptr更好的完成工作,我们可以把它比做成一个秘书或助理。
weak_ptr的构造和析构并不会改变引用计数的大小,它可以由一个shared_ptr或weak_ptr的对象构造获得。它没有对“*”和“->”的重载,但可以使用lock获得一个可用的shared_ptr对象。
当面试官问到weak_ptr智能指针的时候,你可以举出一个场景来说明它的作用
场景--------------解决shared_ptr的循环引用问题
我们知道,智能指针shared_ptr采用的是引用计数的方式,下面我们来写一个双向链表。
#include<iostream>
#include<boost/shared_ptr.hpp>
#include<boost/weak_ptr.hpp>
using namespace std;
struct Node
{
int _data;
boost::shared_ptr<Node> _next;
boost::shared_ptr<Node> _prev;
};
int main()
{
boost::shared_ptr<Node> sp1(new Node);
boost::shared_ptr<Node> sp2(new Node);
sp1->_next = sp2;
sp2->_prev = sp1;
system("pause");
return 0;
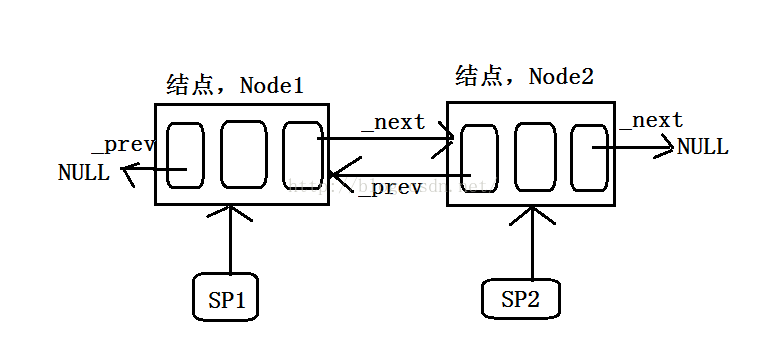
}我们暂且将这两块空间称为Node1,和Node2,。我们从上述代码中可知,sp1,sp2,_next,_prev均为shared_ptr类型的智能指针。sp1与sp2->prev都指向Node1,所以sp1的引用计数为2,同理sp1->_next与sp2都指向Node2,所以sp2的引用计数也为2。这是前提,注意,问题来了。
当我们想销毁这个链表或者说销毁一个结点的时候,我们需要将引用计数置为1,假如,我们要delete sp2这块空间,我们需要将sp2的引用计数置为1,就是说我们需要将sp1->_next这个指针销毁掉。把sp2->_next销毁, 就意味着先要把sp1销毁。
如果想把sp1销毁,就要把sp1的引用计数置为1,所以,我们就要把sp2->_prev销毁,要想把sp2->_prev销毁,就代表先要把sp2销毁。
这样一来,我们就陷入了一个无限的循环当中。
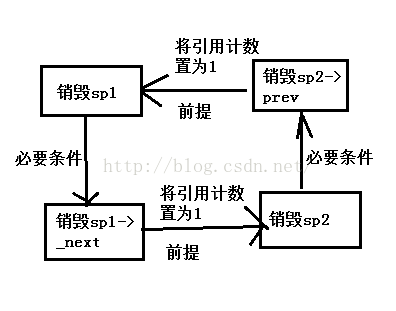
这就是所谓的 shared_ptr智能指针的循环引用问题。
我们如何用weak_ptr来解决这个场景呢?
解决:
#include<iostream>
#include<boost/shared_ptr.hpp>
#include<boost/weak_ptr.hpp>
using namespace std;
struct Node
{
int _data;
boost::weak_ptr<Node> _next;
boost::weak_ptr<Node> _prev;
//boost::shared_ptr<Node> _next;
//boost::shared_ptr<Node> _prev;
};
int main()
{
boost::shared_ptr<Node> sp1(new Node);
boost::shared_ptr<Node> sp2(new Node);
sp1->_next = sp2;
sp2->_prev = sp1;
system("pause");
return 0;
}只需要把Node结点里面的指针定义为weak_ptr类型就好,weak_ptr的构造析构不会影响引用计数的大小,当我们采用这种方式时,sp1和sp2的引用计数始终为1,当我们想销毁时就可以随意操作啦!
当面试官问道你关于,shared _ptr 的循环引用问题或者weak_ptr时,你只需要将这个场景描述给他,就可以轻松的把这道题拿下了,祝你好运!














 936
936











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









