






 文章讲述了在使用python-mgprMax处理金属圆柱体埋在介电半空间中的B-scan数据时,涉及数据格式、shape变化以及从二维数据到可能的三维模型构建过程。重点在于理解shape尺寸和3D.out文件的生成原理。
文章讲述了在使用python-mgprMax处理金属圆柱体埋在介电半空间中的B-scan数据时,涉及数据格式、shape变化以及从二维数据到可能的三维模型构建过程。重点在于理解shape尺寸和3D.out文件的生成原理。
运行
python -m gprMax user_models/cylinder_Bscan_2D.in -n 60merge后数据的格式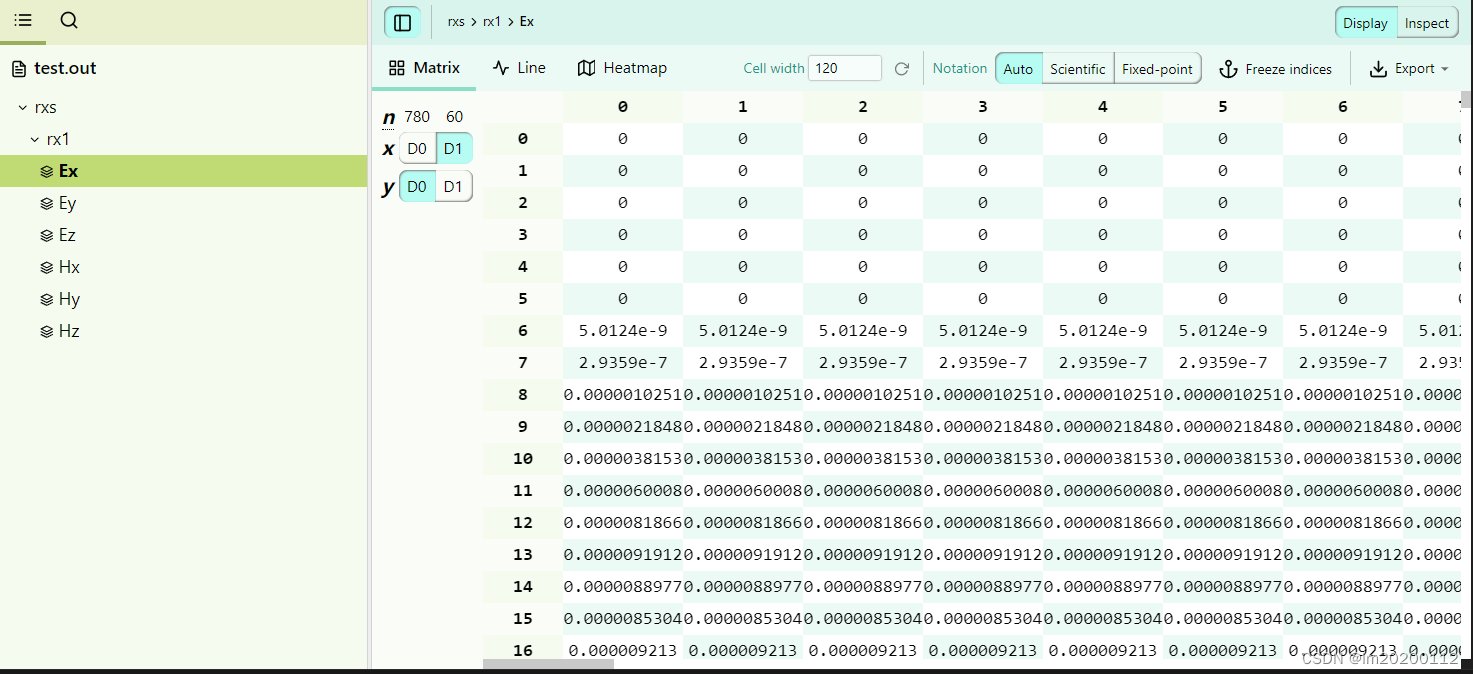
780*60
导入后shape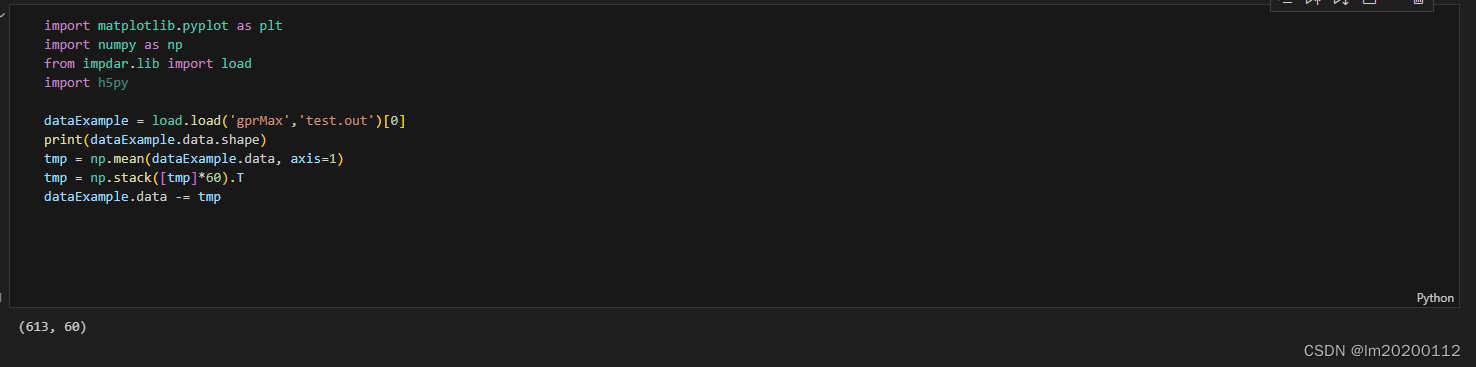 780和613之间有什么关系
780和613之间有什么关系
而导入之后的RadarData ,文档说
data:np.ndarray(snum x tnum) of the actual return power.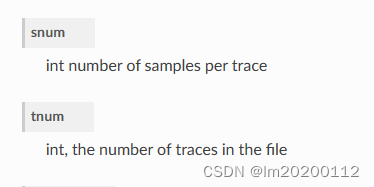
snum代表深度?没改变深度情况下,都是1m
#title: B-scan from a metal cylinder buried in a dielectric half-space
#domain: 1.2 1.2 1.2
#dx_dy_dz: 0.01 0.01 0.01
#time_window: 3e-9
#material: 6 0 1 0 half_space
#waveform: ricker 1 3e8 my_ricker
#hertzian_dipole: z 0.5 0.6 0 my_ricker
#rx: 0.5 0.6 0.1
#src_steps: 0 0 0.01
#rx_steps: 0 0 0.01
#box: 0.1 0 0.1 1.1 1 1.1 half_space
#cylinder: 0.5 0.5 0.25 0.5 0.5 0.75 0.1 pec
#geometry_view: 0 0 0.01 1.2 1.2 1.2 0.01 0.01 0.01 cylinder9_half_space nshape:(10,60)
#title: B-scan from a metal cylinder buried in a dielectric half-space
#domain: 1.2 1.2 1.2
#dx_dy_dz: 0.01 0.01 0.01
#time_window: 1.5e-8
#material: 6 0 1 0 half_space
#waveform: ricker 1 3e8 my_ricker
#hertzian_dipole: z 0.3 1 0.5 my_ricker
#rx: 0.34 1 0.5
#src_steps: 0.01 0 0
#rx_steps: 0.01 0 0
#box: 0.1 0 0.1 1.1 1 1.1 half_space
#cylinder: 0.5 0.5 0.25 0.5 0.5 0.75 0.1 pecshape:(613:60)
有关3D的.out
高级功能 — gprMax 文档这里构建了三维的模型,但没有说生成3D的.out文件,一个3D数据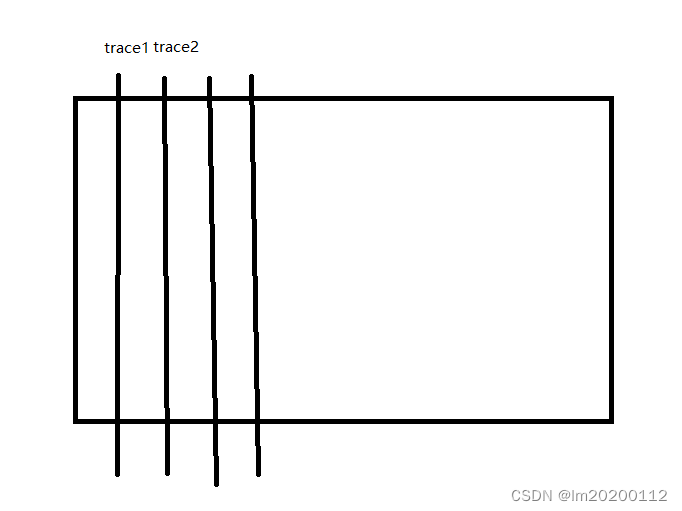 不是一条轨迹merge得到一个二维.out,然后堆叠得到吗
不是一条轨迹merge得到一个二维.out,然后堆叠得到吗















 1099
1099











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









