







前言
本文研究如何利用预测策略来提高多目标进化优化算法在处理动态环境时的性能。基于预测的方法已经应用于动态单目标优 化和动态多目标优化中的一些孤立点的预测。通过考虑连续动态多目标优化问题的性质,我们将这一思想推广到预测整个种群。
一、本节概要
在本节中,我们将讨论当检测到环境变化时,如何通过使用PPS重新初始化种群来应对环境变化。PPS的基本思想是利用历史信息预测一个与新的PS接近的初始种群。为了达到这个目的,我们首先将一个种群分为两个部分:一个中心点和一个流形,然后对每个部分进行估计,得到一个新的种群。
二、数学定义
(一)数学定义
1.
在温和的条件下,具有m个目标的连续MOP的PS形成一个( m-1 )维分片连续流形。因此,在第t个环境中我们可以将分为两部分:一个质点x^t和一个中心质点在原点的流体C^t,即
![]() (2)
(2)
2.的质点位置
设= {
}是第t个稳态MOP的输出,它是PS^t的一个近似。
的质点位置可以用下式来估计
![]()
其中 | P^t | 是P^t的基数。
3.
每个点 ∈
可以表示为
 (3)
(3)
4.中心质点在原点的流体
然后
![]()
5.图例说明
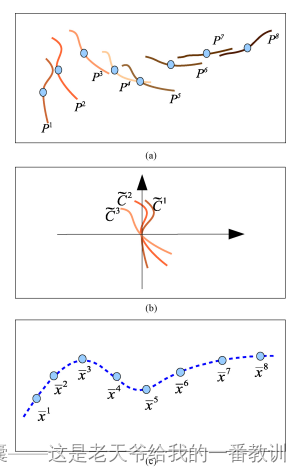
在双目标问题中,PSs形成分段1 - D曲线。图1展示了在二维决策空间中,PS点、PS流形和PS中心的运动情况。
(二)总结
我们通过不同的策略来处理中心和流形。对于前者,中心点![]() 自然形成一个时间序列。因此,我们可利用历史中心点来预测下一个中心点
自然形成一个时间序列。因此,我们可利用历史中心点来预测下一个中心点![]() 。对于后者,在第一节中假设两个连续的PSs在某种意义上应是相似的。因此,我们可以通过前面的PS流形来估计
。对于后者,在第一节中假设两个连续的PSs在某种意义上应是相似的。因此,我们可以通过前面的PS流形来估计![]() 。通过估计
。通过估计![]() 和
和![]() 两部分,我们可以得到一个近似PS^T+1的初始种群。
两部分,我们可以得到一个近似PS^T+1的初始种群。
三、具体方法
接下来的部分给出了估计![]() 和
和![]() 的具体过程,并推导出了下一时间步骤产生新种群的方法。
的具体过程,并推导出了下一时间步骤产生新种群的方法。
(一)PS中心预测
在t+1时刻,PPS保持一个历史中心点序列![]() ,其中M为序列的最大长度。该序列构成一个时间序列。因此,可以应用时间序列预测方法对中心
,其中M为序列的最大长度。该序列构成一个时间序列。因此,可以应用时间序列预测方法对中心![]() 的下一个位置进行预测。由于我们关注的是初始化种群的策略,因此选择单变量自回归( AR )模型。下面我们简单介绍一下AR模型以及模型参数的计算。
的下一个位置进行预测。由于我们关注的是初始化种群的策略,因此选择单变量自回归( AR )模型。下面我们简单介绍一下AR模型以及模型参数的计算。
令![]() ,则
,则![]() 可由各分量的AR ( p )模型估计为
可由各分量的AR ( p )模型估计为
![]() (4)
(4)
其中λ j,i是AR (p)模型的参数,![]() 是方差为
是方差为![]() ,i = 1,2,..,n,j = 0,1,..,p - 1的白噪声,p是AR模型的阶数.
,i = 1,2,..,n,j = 0,1,..,p - 1的白噪声,p是AR模型的阶数.
将历史点![]() ,k=0,1,…,M−1代入(4),得到矩阵公式:
,k=0,1,…,M−1代入(4),得到矩阵公式:
![]()
其中i= 1,2,…,n。AR(p) 模型的系数有效向量![]() (i=1,2,…,n) 可以通过使用最小二乘回归方法计算为
(i=1,2,…,n) 可以通过使用最小二乘回归方法计算为
![]()
方差![]() 被估计为平均平方误差
被估计为平均平方误差
(二) PS流形估计
PS记录最后两个近似流形![]() 和
和![]() 来估计PS流形
来估计PS流形![]() 。更具体地说,每个点
。更具体地说,每个点![]() 用来估计一个新的点为
用来估计一个新的点为
 (6)
(6)
其中![]() 。方差
。方差 ![]() 的计算公式为
的计算公式为
D( A、B)度量流形A和B之间的距离定义为
其中| A |是A的基数,| | x-y | |是x和y之间的欧氏距离.很明显,每个点和每个维度的方差都是相同的。可能还存在其他方法来度量两个PS流形之间的相似性,并估计其方差。由于( 6 )在实现上的简洁性,我们使用( 6 )
(三)解的生成
假设( 4 )和( 6 )中的噪声是相互独立的。将( 4 )和( 6 )代入( 3 ),我们可以推导出一个方程来预测每个![]() 的新位置
的新位置
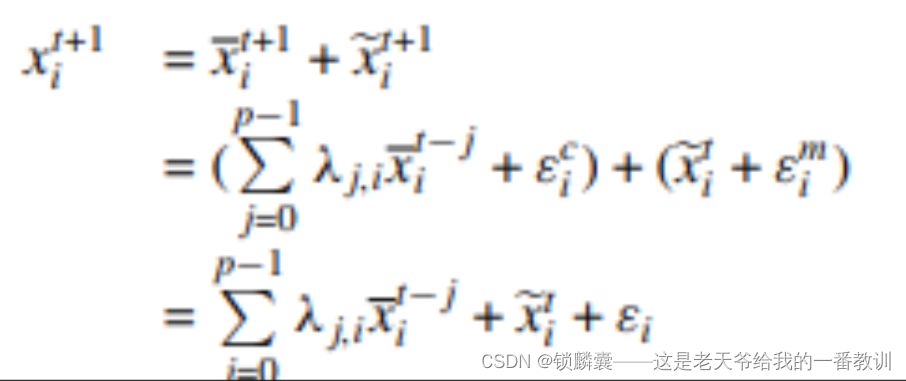 (7)
(7)
其中i=1,2,…,~N,
,其中
表示白噪声的方差。
希望 (7) 生成的初始种群 {x^t+1} 接近PS^t+1。
(四)PPS过程
PPS过程集成在DMOEA框架中。它的目标是当一个变化发生时,即在时间点开始时,初始化一个新的种群Pt。现将PPS过程总结如下。
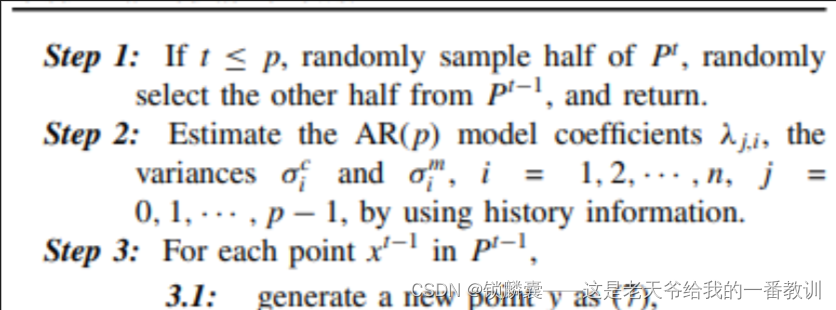
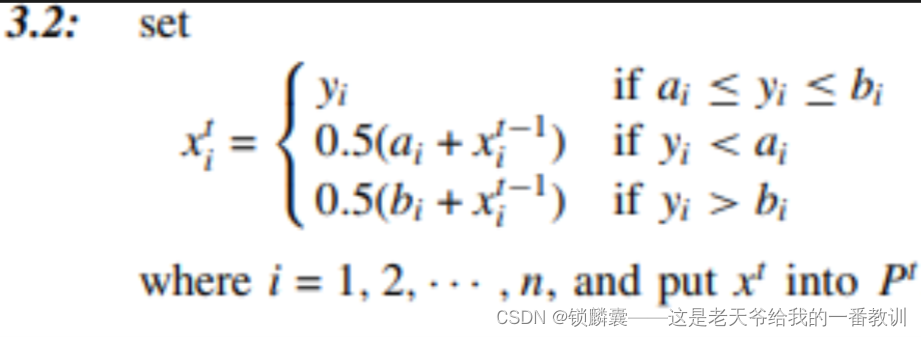
在步骤1中,当历史信息不足以建立AR ( p )模型时,我们随机抽取一半种群,并从上一次搜索中重新使用一半种群。在Step3.1中,通过提出的策略预测一个新的解决方案。在步骤3.2中,如果每个新点在边界外,则将其修复为在边界内。
四、优势
与某文献提出的前馈预测策略( FPS )相比,PPS具有以下优点:1 )通过考虑连续DMOPs的性质来预测一个整体种群,而不是一些孤立的点;2 )在运行过程中,建立时间序列模型,并在一个内存中维护历史中心和两个流形。因此,PPS的时间复杂度和空间复杂度均小于FPS。
















 4022
4022











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









