







文章目录
项目说明
内容改编自 唐国梁Tommy : 轻松学PyTorch 肺部感染识别案例简介
有配套代码和视频,可以前去学习
数据集说明
- 官方地址,可免费下载数据
https://data.mendeley.com/datasets/rscbjbr9sj/2
数据文件结构
─chest_xray
└─train
│ ├─NORMAL 1341
│ └─PNEUMONIA 3880
└─test
│ ├─NORMAL 234
│ └─PNEUMONIA 390
└─val
├─NORMAL 8
└─PNEUMONIA 8
ChestXRay2017数据集共包含5856张胸腔X射线透视图,诊断结果(即分类标签)主要分为正常和肺炎,其中肺炎又可以细分为:细菌性肺炎和病毒性肺炎。
在PNEUMONIA文件夹内含有细菌性和病毒性肺炎两类,可以通过图片的命名格式进行判别。
代码实现
一些需要事先安装的库:
pip3 install tb-nightly
pip3 install mlxtend
pip3 show torchsummary
导入库
import torch
import torch.nn as nn
import numpy as np
import torch.optim as optim
from torchvision import transforms, datasets, models, utils
from torchsummary import summary # 可视化训练过程
from torch.utils.data import DataLoader
import time
import matplotlib.pyplot as plt
import os
import seaborn as sns
import pandas as pd
from mlxtend.plotting import plot_confusion_matrix
from sklearn.metrics import confusion_matrix
from PIL import Image
定义transform,划分数据集
compose = transforms.Compose([
transforms.Resize(300),
transforms.CenterCrop(256),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406],# mean
[0.229, 0.224, 0.225])# std
])
image_transforms = {
'train' : transforms.Compose([
transforms.RandomResizedCrop(size=300, scale=(0.8, 1.1)), #功能:随机长宽比裁剪原始图片, 表示随机crop出来的图片会在的0.08倍至1.1倍之间
transforms.RandomRotation(degrees=10), #功能:根据degrees随机旋转一定角度, 则表示在(-10,+10)度之间随机旋转
transforms.ColorJitter(0.4, 0.4, 0.4), #功能:修改亮度、对比度和饱和度
transforms.RandomHorizontalFlip(), #功能:水平翻转
transforms.CenterCrop(size=256), #功能:根据给定的size从中心裁剪,size - 若为sequence,则为(h,w),若为int,则(size,size)
transforms.ToTensor(), #numpy --> tensor
# 功能:对数据按通道进行标准化(RGB),即先减均值,再除以标准差
transforms.Normalize([0.485, 0.456, 0.406],# mean
[0.229, 0.224, 0.225])# std
]),
'val' : compose,
'test' : compose
}
加载数据集
# 数据集所在目录路径
# data_dir = './chest_xray/'
data_dir = '/Users/xx/Documents/repos/nlp_repos/肺部识别案例代码+数据集/chest_xray/'
# train路径
train_dir = data_dir + 'train/'
# val路径
val_dir = data_dir + 'val/'
# test路径
test_dir = data_dir + 'test/'
# 从文件中读取数据
datasets = {
'train' : datasets.ImageFolder(train_dir, transform=image_transforms['train']), # 读取train中的数据集,并transform
'val' : datasets.ImageFolder(val_dir, transform=image_transforms['val']), # 读取val中的数据集,并transform
'test' : datasets.ImageFolder(test_dir, transform=image_transforms['test']) # 读取test中的数据集,并transform
}
# 定义BATCH_SIZE
BATCH_SIZE = 128 # 每批读取128张图片
# DataLoader : 创建iterator, 按批读取数据
dataloaders = {
'train' : DataLoader(datasets['train'], batch_size=BATCH_SIZE, shuffle=True), # 训练集
'val' : DataLoader(datasets['val'], batch_size=BATCH_SIZE, shuffle=True), # 验证集
'test' : DataLoader(datasets['test'], batch_size=BATCH_SIZE, shuffle=True) # 测试集
}
# 创建label的键值对
LABEL = dict((v, k) for k, v in datasets['train'].class_to_idx.items())
LABEL
# {0: 'NORMAL', 1: 'PNEUMONIA'}
查看 dataloaders 信息
# 查看 train 数据简介
dataloaders['train'].dataset
Dataset ImageFolder
Number of datapoints: 5221
Root location: /Users/xx/Documents/repos/nlp_repos/肺部识别案例代码+数据集/chest_xray/train/
StandardTransform
Transform: Compose(
RandomResizedCrop(size=(300, 300), scale=(0.8, 1.1), ratio=(0.75, 1.3333), interpolation=bilinear)
RandomRotation(degrees=[-10.0, 10.0], interpolation=nearest, expand=False, fill=0)
ColorJitter(brightness=[0.6, 1.4], contrast=[0.6, 1.4], saturation=[0.6, 1.4], hue=None)
RandomHorizontalFlip(p=0.5)
CenterCrop(size=(256, 256))
ToTensor()
Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
)
dataloaders['train'].dataset.classes # train下的类别
# ['NORMAL', 'PNEUMONIA']
dataloaders['train'].dataset.root # train的路径
# '/Users/xx/Documents/repos/nlp_repos/肺部识别案例代码+数据集/chest_xray/train/'
# 肺部正常的图片
files_normal = os.listdir(os.path.join(str(dataloaders['train'].dataset.root), 'NORMAL'))
files_normal
['NORMAL2-IM-0927-0001.jpeg',
'NORMAL2-IM-1056-0001.jpeg',
'IM-0427-0001.jpeg',
'NORMAL2-IM-1260-0001.jpeg',
'IM-0656-0001-0001.jpeg',
'IM-0345-0001.jpeg',
'IM-0729-0001.jpeg',
...
'NORMAL2-IM-0552-0001.jpeg',
'NORMAL2-IM-0880-0001.jpeg',
'NORMAL2-IM-0849-0001.jpeg',
'IM-0125-0001.jpeg',
...]
# 肺部感染的图片
files_pneumonia = os.listdir(os.path.join(str(dataloaders['train'].dataset.root), 'PNEUMONIA'))
files_pneumonia
['person63_bacteria_306.jpeg',
'person1438_bacteria_3721.jpeg',
'person755_bacteria_2659.jpeg',
'person478_virus_975.jpeg',
'person661_bacteria_2553.jpeg',
'person276_bacteria_1296.jpeg',
'person1214_bacteria_3166.jpeg',
'person1353_virus_2333.jpeg',
'person26_bacteria_122.jpeg',
'person124_virus_238.jpeg',
...
'person1460_bacteria_3805.jpeg',
'person679_virus_1270.jpeg',
...]
# val 数据信息
dataloaders['val'].dataset
Dataset ImageFolder
Number of datapoints: 16
Root location: /Users/xx/Documents/repos/nlp_repos/肺部识别案例代码+数据集/chest_xray/val/
StandardTransform
Transform: Compose(
Resize(size=300, interpolation=bilinear, max_size=None, antialias=None)
CenterCrop(size=(256, 256))
ToTensor()
Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
)
# test 数据信息
dataloaders['test'].dataset
Dataset ImageFolder
Number of datapoints: 624
Root location: /Users/xx/Documents/repos/nlp_repos/肺部识别案例代码+数据集/chest_xray/test/
StandardTransform
Transform: Compose(
Resize(size=300, interpolation=bilinear, max_size=None, antialias=None)
CenterCrop(size=(256, 256))
ToTensor()
Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
)
# 导入SummaryWriter
from torch.utils.tensorboard import SummaryWriter
# SummaryWriter() 向事件文件写入事件和概要
# 定义日志路径
log_path = 'logdir/'
# 定义函数:获取tensorboard writer
def tb_writer():
timestr = time.strftime("%Y%m%d_%H%M%S") # 时间格式
writer = SummaryWriter(log_path+timestr) # 写入日志
return writer
writer = tb_writer()
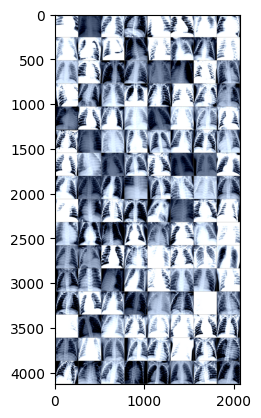
# 第1种方法:显示部分图片集
images, labels = next(iter(dataloaders['train'])) # 获取到一批数据
# 定义图片显示方法
def imshow(img):
img = img / 2 + 0.5 # 逆正则化
np_img = img.numpy() # tensor --> numpy
plt.imshow(np.transpose(np_img, (1, 2, 0))) # 改变通道顺序
plt.show()
grid = utils.make_grid(images) # make_grid的作用是将若干幅图像拼成一幅图像
imshow(grid) # 展示图片
# 在summary中添加图片数据
writer.add_image('X-Ray grid', grid, 0) # add_image(tag, img_tensor, global_step=None, walltime=None, dataformats='CHW')
writer.flush() # 把事件文件写入到磁盘
2023-02-22 08:47:44.247182: I tensorflow/core/platform/cpu_feature_guard.cc:193] This TensorFlow binary is optimized with oneAPI Deep Neural Network Library (oneDNN) to use the following CPU instructions in performance-critical operations: AVX2 FMA
To enable them in other operations, rebuild TensorFlow with the appropriate compiler flags.
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
显示图片
# 获取一张图片tensor
dataloaders['train'].dataset[4] # 返回:tensor, label
(tensor([[[-0.4054, -0.3198, -0.2856, ..., -0.6965, -0.6452, -0.6109],
[-0.3541, -0.3198, -0.3198, ..., -0.5082, -0.4226, -0.4911],
[-0.3027, -0.3541, -0.3027, ..., -0.4397, -0.4054, -0.5596],
...,
[ 0.7762, 0.8447, 0.8618, ..., -2.1179, -2.1179, -2.1179],
[ 0.8276, 0.8618, 0.8961, ..., -2.1179, -2.1179, -2.1179],
[ 0.8447, 0.8961, 0.8618, ..., -2.1179, -2.1179, -2.1179]],
[[-0.2850, -0.1975, -0.1625, ..., -0.5826, -0.5301, -0.4951],
[-0.2325, -0.1975, -0.1975, ..., -0.3901, -0.3025, -0.3725],
[-0.1800, -0.2325, -0.1800, ..., -0.3200, -0.2850, -0.4426],
...,
[ 0.9230, 0.9930, 1.0105, ..., -2.0357, -2.0357, -2.0357],
[ 0.9755, 1.0105, 1.0455, ..., -2.0357, -2.0357, -2.0357],
[ 0.9930, 1.0455, 1.0105, ..., -2.0357, -2.0357, -2.0357]],
[[-0.0615, 0.0256, 0.0605, ..., -0.3578, -0.3055, -0.2707],
[-0.0092, 0.0256, 0.0256, ..., -0.1661, -0.0790, -0.1487],
[ 0.0431, -0.0092, 0.0431, ..., -0.0964, -0.0615, -0.2184],
...,
[ 1.1411, 1.2108, 1.2282, ..., -1.8044, -1.8044, -1.8044],
[ 1.1934, 1.2282, 1.2631, ..., -1.8044, -1.8044, -1.8044],
[ 1.2108, 1.2631, 1.2282, ..., -1.8044, -1.8044, -1.8044]]]),
0)
# 第2种方法:显示一张图片
def show_sample(img, label):
print("Label : ", dataloaders['train'].dataset.classes[label]) # 输出标签
img = img.numpy().transpose((1, 2, 0)) # 改变shape顺序
mean = np.array([0.485, 0.456, 0.406]) # 均值
std = np.array([0.229, 0.224, 0.225]) # 标准差
img = img * std + mean # 逆向复原
img = np.clip(img, 0, 1) # np.clip() 将inp中的元素值限制在(0,1)之间,最小值为0,最大值为1。小于min的等于min,大于max等于max
plt.imshow(img)
plt.axis('off') # 关闭坐标轴
show_sample(*dataloaders['train'].dataset[4]) # 显示第5张图片
# Label : NORMAL

# 第3种方法:显示一张图片
def show_image(img):
plt.figure(figsize=(8,8)) # 显示大小
plt.imshow(img) # 显示图片
plt.axis('off') # 关闭坐标轴
plt.show()
# 读取图片
one_img = Image.open(dataloaders['train'].dataset.root+'NORMAL/IM-0239-0001.jpeg')
# 调用函数
show_image(one_img)

记录错误分类的图片
def misclassified_images(pred, writer, target, images, output, epoch, count=10):
misclassified = (pred != target.data) # 判断是否一致
for index, image_tensor in enumerate(images[misclassified][:count]):
img_name = 'Epoch:{}-->Predict:{}-->Actual:{}'.format(epoch, LABEL[pred[misclassified].tolist()[index]],
LABEL[target.data[misclassified].tolist()[index]])
writer.add_image(img_name, image_tensor, epoch)
自定义池化层
class AdaptiveConcatPool2d(nn.Module):
def __init__(self, size=None):
super(AdaptiveConcatPool2d,self).__init__()
size = size or (1, 1) # kernel大小
# 自适应算法能够自动帮助我们计算核的大小和每次移动的步长。
self.avgPooling = nn.AdaptiveAvgPool2d(size) # 自适应平均池化
self.maxPooling = nn.AdaptiveMaxPool2d(size) # 最大池化
def forward(self, x):
# 拼接avg和max
return torch.cat([self.maxPooling(x), self.avgPooling(x)], dim=1)
迁移学习
# 迁移学习:获取预训练模型,并替换池化层和全连接层
def get_model():
# 获取欲训练模型 restnet50
model = models.resnet50(pretrained=True)
# 冻结模型参数
for param in model.parameters():
param.requires_grad = False
# 替换最后2层:池化层和全连接层
# 池化层
model.avgpool = AdaptiveConcatPool2d()
# 全连接层
model.fc = nn.Sequential(
nn.Flatten(), # 拉平
nn.BatchNorm1d(4096), # 加速神经网络的收敛过程,提高训练过程中的稳定性
nn.Dropout(0.5), # 丢掉部分神经元
nn.Linear(4096, 512), # 全连接层
nn.ReLU(), # 激活函数
nn.BatchNorm1d(512),
nn.Dropout(0.5),
nn.Linear(512, 2), # 2个输出
nn.LogSoftmax(dim=1) # 损失函数:将input转换成概率分布的形式,输出2个概率
)
return model
models.resnet50 内容:
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=2048, out_features=1000, bias=True)
)
替换最后2层(池化层和全连接层):后
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
...
)
(layer2): Sequential(
...
)
(layer3): Sequential(
...
)
(layer4): Sequential(
(0): Bottleneck(
...
)
)
(1): Bottleneck(
...
)
(2): Bottleneck(
...
)
)
(avgpool): AdaptiveConcatPool2d(
(avgPooling): AdaptiveAvgPool2d(output_size=(1, 1))
(maxPooling): AdaptiveMaxPool2d(output_size=(1, 1))
)
(fc): Sequential(
(0): Flatten(start_dim=1, end_dim=-1)
(1): BatchNorm1d(4096, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=512, bias=True)
(4): ReLU()
(5): BatchNorm1d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(6): Dropout(p=0.5, inplace=False)
(7): Linear(in_features=512, out_features=2, bias=True)
(8): LogSoftmax(dim=1)
)
)
定义训练函数
def train_val(model, device, train_loader, val_loader, optimizer, criterion, epoch, writer):
model.train()
total_loss = 0.0
val_loss = 0.0
val_acc = 0
for batch_id, (images, labels) in enumerate(train_loader):
# 部署到device上
images, labels = images.to(device), labels.to(device)
# 梯度置0
optimizer.zero_grad()
# 模型输出
outputs = model(images)
# 计算损失
loss = criterion(outputs, labels)
# 反向传播
loss.backward()
# 更新参数
optimizer.step()
# 累计损失
total_loss += loss.item() * images.size(0)
# 平均训练损失
train_loss = total_loss / len(train_loader.dataset)
#写入到writer中
writer.add_scalar('Training Loss', train_loss, epoch)
# 写入到磁盘
writer.flush()
model.eval()
with torch.no_grad():
for images, labels in val_loader:
images, labels = images.to(device), labels.to(device)
outputs = model(images) # 前向传播输出
loss = criterion(outputs, labels) # 损失
val_loss += loss.item() * images.size(0) # 累计损失
_, pred = torch.max(outputs, dim=1) # 获取最大概率的索引
correct = pred.eq(labels.view_as(pred)) # 返回:tensor([ True,False,True,...,False])
accuracy = torch.mean(correct.type(torch.FloatTensor)) # 准确率
val_acc += accuracy.item() * images.size(0) # 累计准确率
# 平均验证损失
val_loss = val_loss / len(val_loader.dataset)
# 平均准确率
val_acc = val_acc / len(val_loader.dataset)
return train_loss, val_loss, val_acc
定义测试函数
def test(model, device, test_loader, criterion, epoch, writer):
model.eval()
total_loss = 0.0
correct = 0.0 # 正确数
with torch.no_grad():
for batch_id, (images, labels) in enumerate(test_loader):
images, labels = images.to(device), labels.to(device)
# 输出
outputs = model(images)
# 损失
loss = criterion(outputs, labels)
# 累计损失
total_loss += loss.item()
# 获取预测概率最大值的索引
_, predicted = torch.max(outputs, dim=1)
# 累计正确预测的数
correct += predicted.eq(labels.view_as(predicted)).sum().item()
# 错误分类的图片
misclassified_images(predicted, writer, labels, images, outputs, epoch)
# 平均损失
avg_loss = total_loss / len(test_loader.dataset)
# 计算正确率
accuracy = 100 * correct / len(test_loader.dataset)
# 将test的结果写入write
writer.add_scalar("Test Loss", total_loss, epoch)
writer.add_scalar("Accuracy", accuracy, epoch)
writer.flush()
return total_loss, accuracy
定义训练流程
# 是否有GPU
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
print(device.type) # cpu
# 模型部署到device
model = get_model().to(device)
# 损失函数
criterion = nn.NLLLoss()
# 优化器
optimizer = optim.SGD(model.parameters(), lr=0.001)
# 定义训练流程函数
def train_epochs(model, device, dataloaders, criterion, optimizer, epochs, writer):
# 输出信息
print("{0:>15} | {1:>15} | {2:>15} | {3:>15} | {4:>15} | {5:>15}".format('Epoch', 'Train Loss', 'val_loss', 'val_acc', 'Test Loss', 'Test_acc'))
# 初始最小的损失
best_loss = np.inf
# 开始训练、测试
for epoch in range(epochs):
# 训练,return: loss
train_loss, val_loss, val_acc = train_val(model, device, dataloaders['train'], dataloaders['val'], optimizer, criterion, epoch, writer)
# 测试,return: loss + accuracy
test_loss, test_acc = test(model, device, dataloaders['test'], criterion, epoch, writer)
# 判断损失是否最小
if test_loss < best_loss:
best_loss = test_loss # 保存最小损失
# 保存模型
torch.save(model.state_dict(), 'model.pth')
# 输出结果
print("{0:>15} | {1:>15} | {2:>15} | {3:>15} | {4:>15} | {5:>15}".format(epoch, train_loss, val_loss, val_acc, test_loss, test_acc))
writer.flush()
调用函数
# 调用函数
epochs=10
train_epochs(model, device, dataloaders, criterion, optimizer, epochs, writer)
writer.close()
Epoch | Train Loss | val_loss | val_acc | Test Loss | Test_acc
绘图
def plot_confusion(cm):
plt.figure()
plot_confusion_matrix(cm, figsize=(12, 8), cmap=plt.cm.Blues) # 参数设置
plt.xticks(range(2), ['Normal', 'Pneumonia'], fontsize=14)
plt.yticks(range(2), ['Normal', 'Pneumonia'], fontsize=14)
plt.xlabel('Predicted Label', fontsize=16)
plt.ylabel('True Label', fontsize=16)
plt.show()
计算正确率函数
def accuracy(outputs, labels):
_, preds = torch.max(outputs, dim=1)
correct = torch.tensor(torch.sum(preds == labels).item() / len(preds))
return correct
评估
def metrics(outputs, labels):
_, preds = torch.max(outputs, dim=1)
# precision, recall, F1
# 混淆矩阵
cm = confusion_matrix(labels.cpu().numpy(), preds.cpu().numpy())
# 绘制混淆矩阵
plot_confusion(cm)
# 获取tn, fp, fn, tp
tn, fp, fn, tp = cm.ravel()
# 精准率
precision = tp / (tp + fp)
# 召回率
recall = tp / (tp + fn)
# f1 score
f1 = 2 * ((precision * recall) / (precision + recall))
return precision, recall, f1
计算testloader
precisions = []
recalls = []
f1s = []
accuracies = []
with torch.no_grad():
model.eval()
for datas, labels in dataloaders['test']:
datas, labels = datas.to(device), labels.to(device)
# 预测输出
outputs = model(datas)
# 计算metrics
precision, recall, f1 = metrics(outputs, labels)
acc = accuracy(outputs, labels)
# 保存结果
precisions.append(precision)
recalls.append(recall)
f1s.append(f1)
accuracies.append(acc.item())
['{:.2f}%'.format(pre*100) for pre in precisions]# 精准率 precision
['{:.2f}%'.format(r*100) for r in recalls]# 召回率 recall
['{:.2f}%'.format(f*100) for f in f1s]# f1
['{:.2f}%'.format(a*100) for a in accuracies]# 准确率 accuracy
伊织 2023-02-22(三)

















 283
283

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









