







0. 简介
我们在日常使用激光SLAM算法的时候,常常会发现现有的算法只会和一些比较经典或者前作去进行比较,很多时候我们更希望对主流的激光SLAM方法进行性能比较。之前作者转载过一篇文章《常见不同3D激光SLAM方案对比》。但是对比的算法有限。现在瑞典Lule科技大学评估9种最常用的激光SLAM方法。我们下面主要来看一下性能对比部分的内容。
1. 总览所有激光slam
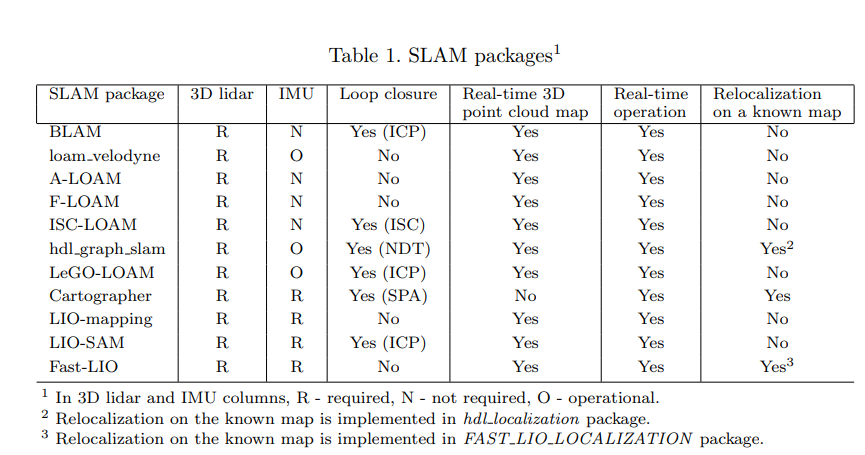
所有SLAM方法,所需硬件及其特性均在表1中总结。接下来的步骤是在SLAM方法上运行记录的数据。
2. 对轨迹的评估和比较
通过地下隧道收集的数据集在缺乏特征、重复性和狭窄尺寸方面对基于激光雷达的SLAM算法构成了挑战,而两个闭环分支还可以评估方法的闭环性能。所有SLAM方法都经过了精心调整,但根据多次评估,我们得出结论:VLP16 Lite的视场不足以在垂直维度上捕捉足够的数据,这导致z轴的不确定性很高,即使使用IMU也无法弥补,如图3所示。
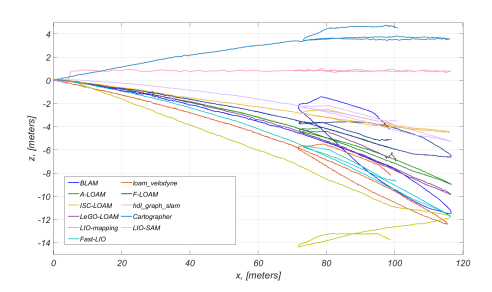
图3. 所有方法z坐标估计精度



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











