







0. 简介
对于传感器选型,很多新手乃至工程师也不太清楚,不同价位以及不同设备之间的区别。这里作者想根据自己的一些经验,以及网上的一些资料,给各位读者提供一些建议,以及这些设备要怎么去使用。
1. 相机
1.1 usb相机(业余&消费)
USB摄像机是采用USB接口的安防摄像机,即插即用,傻瓜式操作,无需采集卡,无需电源,免拆机箱、支持笔记本电脑。与传统的监控摄像机相比成本更低,而且可以远程网络观看。方便实用,操作简单。
-
优:很容易整合。
-
优:可以做很多的离线的图像工作(曝光控制,帧率等)。
-
优:提供输入/中断功能,可为您节省计算应用程序时间(例如,在新帧上中断)。
-
缺:由于USB总线使用CPU时间,如果使用100%CPU,这会影响您的应用程序。
-
缺:对于使用硬件视觉管线(硬件编码器等)不是最佳的。
-
优:可以长距离工作(最高可达USB标准)。
-
优:可以支持更大的图像传感器(1英寸或更高,以获得更好的图像质量和更少的噪音)。

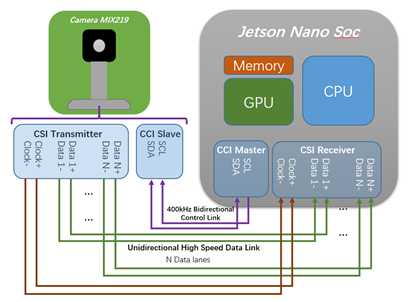
1.2 MIPI CSI汇流排相机(消费)
CSI-2接口规范是由MIPI(Mobile Industry Processor Interface)联盟组织于2005年发布的关于相机串行接口。MIPI(Mobile Industry Processor Interface)是2003年由ARM, Nokia, ST ,TI等公司成立的一个联盟,目的是把手机内部的接口如摄像头、显示屏接口、射频/基带接口等标准化,从而减少手机设计的复杂程度和增加设计灵活性。MIPI联盟下面有不同的WorkGroup,分别定义了一系列的手机内部接口标准,比如摄像头接口CSI、显示接口DSI、射频接口DigRF、麦克风/喇叭接口SLIMbus等
-
优:根据CPU和内存使用情况进行优化,以便将图像处理并存入内存。
-
优:可以充分利用硬件的视觉管线。
-
缺:支持较短距离(通常不超过10cm)。除非您使用序列化系统(GMSL,FPD Link,COAXPress,Ambarella),但这些系统目前尚不成熟并且需要定制。
-
缺:通常与手机相机模块的小型传感器一样,要不就得多花点钱去定制。通过TX1/2中的硬件去噪降低小传感器的额外噪音。
-
优:可执行底层访问与控制传感器/摄像头。
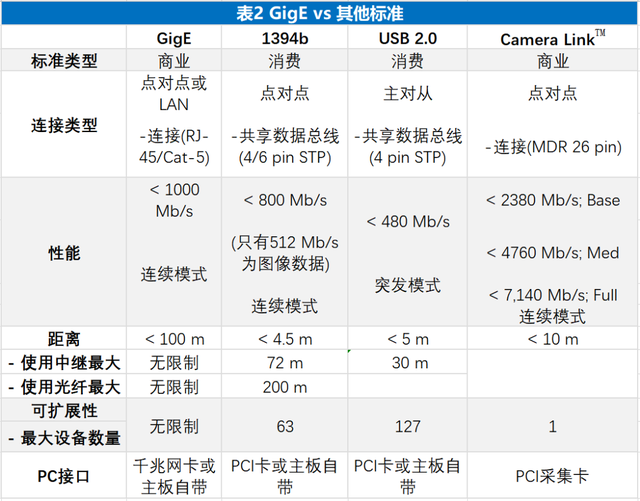
1.3 以太网相机(机器人&车规)
美国自动化成像协会(AIA)推出了GigE Vision标准,该标准是基于千兆以太网通信协议开发的,经现有的以太网线实现快远距离速图像传输,能实时快速、高带宽地传输大型图像,传输速率达125MB/秒,传输距离达100米。

GigE工业相机可以统一机器视觉产品中的几乎所有工业相机的协议,同时还容许其他组织在其基础上开发其他兼容的软件和硬件。目前,有很多产品都可以支持GigE Vision标准。
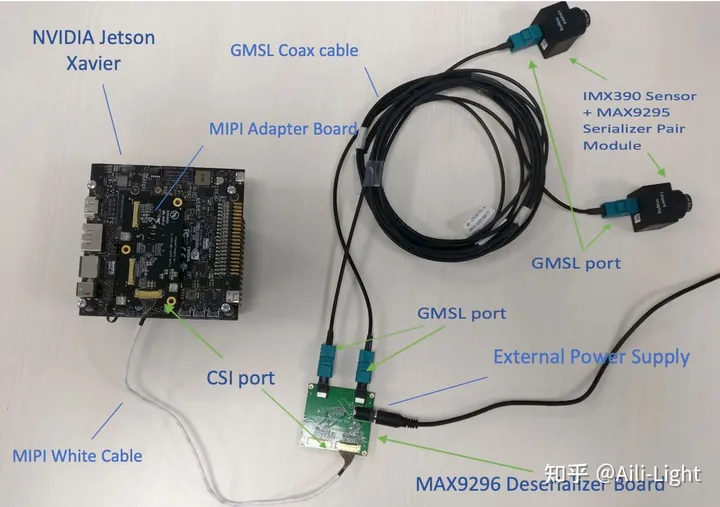
1.4 gsml相机(车规)
LVDS数传接口主要协议分为两种:GMSL和FPD Link,这两种接口在汽车视频传输方面的应用是比较广泛的,尤其是Camera和处理器之间的链路,通过STP或者同轴电缆能使整个链路达到15m。
GMSL 是 Maxim 公司推出的一种高速串行接口,适用于视频、音频和控制信号的传输,使用 50Ω 同轴电缆或 100Ω 屏蔽双绞线(STP)电缆时的距离可达 15m 或更长。
以ADAS摄像头为例,这也是GMSL应用的主要领域。一般来讲,摄像头除了对外发送捕获到的图像数据外,还会发送帧同步信号,行同步信号,像素时钟等信息,此外还有电源供给等等,它是由许多信号线组成的一个并行总线,并行总线在高速的数据传输过程中,是不占据优势的,因此我们需要将这些并行的信号合并为串行信号,再通过更高频率进行传输。
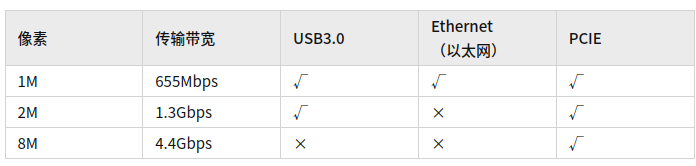
PCIE采集卡(图7)就是专门为PC电脑/工控机设计的GMSL摄像头接入设备。PCIE采集卡的具有高带宽、多通道的特点,其通用性好,实时性高,广泛应用于自动驾驶的研发和数据采集上。

如表2所示,1M(100万像素) - 8M(8百万像素)摄像头的数据传输带宽在655Mbps – 4.4Gbps。从带宽的限制来看,USB3.0最高只能支持到2M,以太网最高支持到1M,只有PCIE可以满足所有的传输需求。
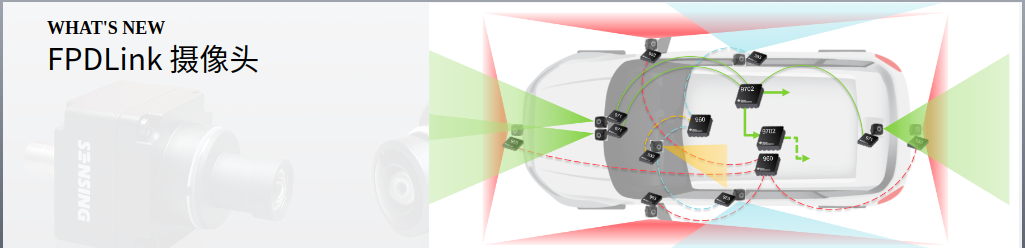
1.5 FPD Link(车规)
FPD-Link III 串行总线方案支持通过单个差分链路实现高速视频数据传输和双向控制通信的全双工控制。 通过单个差分对整合视频数据和控制可减少互连线尺寸和重量,同时还消除了偏差问题并简化了系统设计。
FPD Link是TI公司的一种串行总线解决方案。与GMSL一样,它可以使用50Ω同轴电缆或100Ω屏蔽双绞线(STP)电缆以低延迟传输未压缩的视频和控制数据。

借助 FPD-Link™ 串行器和解串器,为汽车系统中的各种视频接口(包括用于高级驾驶辅助系统 (ADAS) 的摄像头和信息娱乐系统显示屏)简化高分辨率信号的设计和传输。我们的 FPD-Link 摄像头串行器/解串器支持通过单根低延迟电缆传输未压缩的视频、控制信号和电源。我们的 FPD-Link 显示串行器/解串器支持全 1080p、2k 和 3k 高清显示屏以及设备级 HDCP 密钥,同时还提供自适应均衡以补偿电缆老化和温度变化
具体的车载发展史可以看一下这篇文章汽车电子数据传输协议CAN、CAN FD 、A²B、Ethernet100Base-T1&Ethernet1000Base-T1、FPD-LINK、GMSL的端口名词解释汇总
2. IMU
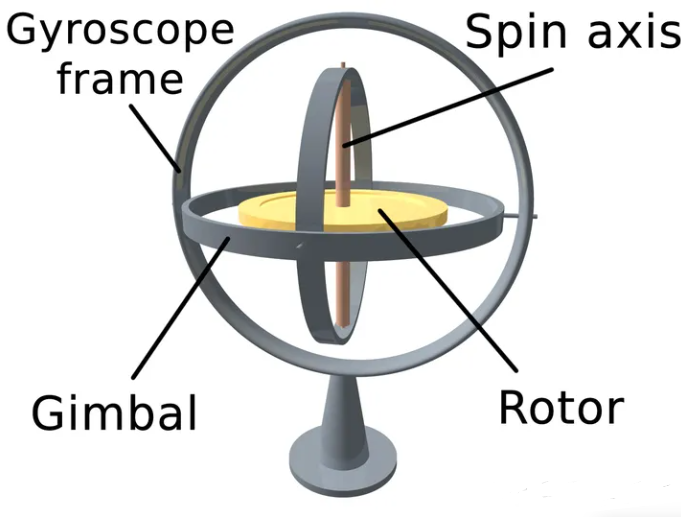
2.1 惯性测量单元
惯性测量单元(Inertial measurement unit,IMU),是测量物体三轴姿态角以及加速度的装置。IMU通常包含陀螺仪 (Gyroscope)、加速度计 (Accelermeters),有的还包含磁力计(Magnetometers)。陀螺仪用来测量三轴的角度/角速度,加速度计用来测量三轴的加速度,磁力计提供磁场朝向信息。
2.2 IMU分类
对于IMU而言,这方面技术壁垒高、份额高度集中,其主要分为激光、光纤和MEMS式三种。
2.2.1 Ring Laser Gyro (RLG) IMU-环形激光陀螺仪(车规+可用作真值)
1913年,法国科学家George Sagnac发现:当光束在一个环形介质通道中行进时,若环形通道本身具有一个转动的角速度,那么光线沿着通道转动方向行进所需要的时间,要比沿着这个通道转动相反的方向行进所需要的时间要多。而利用Sagnac效应的两种陀螺仪分别是环形激光陀螺仪和光纤陀螺仪。这两种方法制作的雷达精度更高,但是价格也是更多的
环形激光陀螺IMU使用环形激光器和光纤传感器来测量角速度。它基于光学旋转的原理,通过测量激光光束在环形路径上的相位差来计算角速度。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











