







0. 简介
之前我们在《常用传感器指标以及性能》一文中大致梳理了主要传感器的类型,而这部分对应具体传感器效果怎么样,以及这些传感器的指标是什么样的
1. 激光雷达
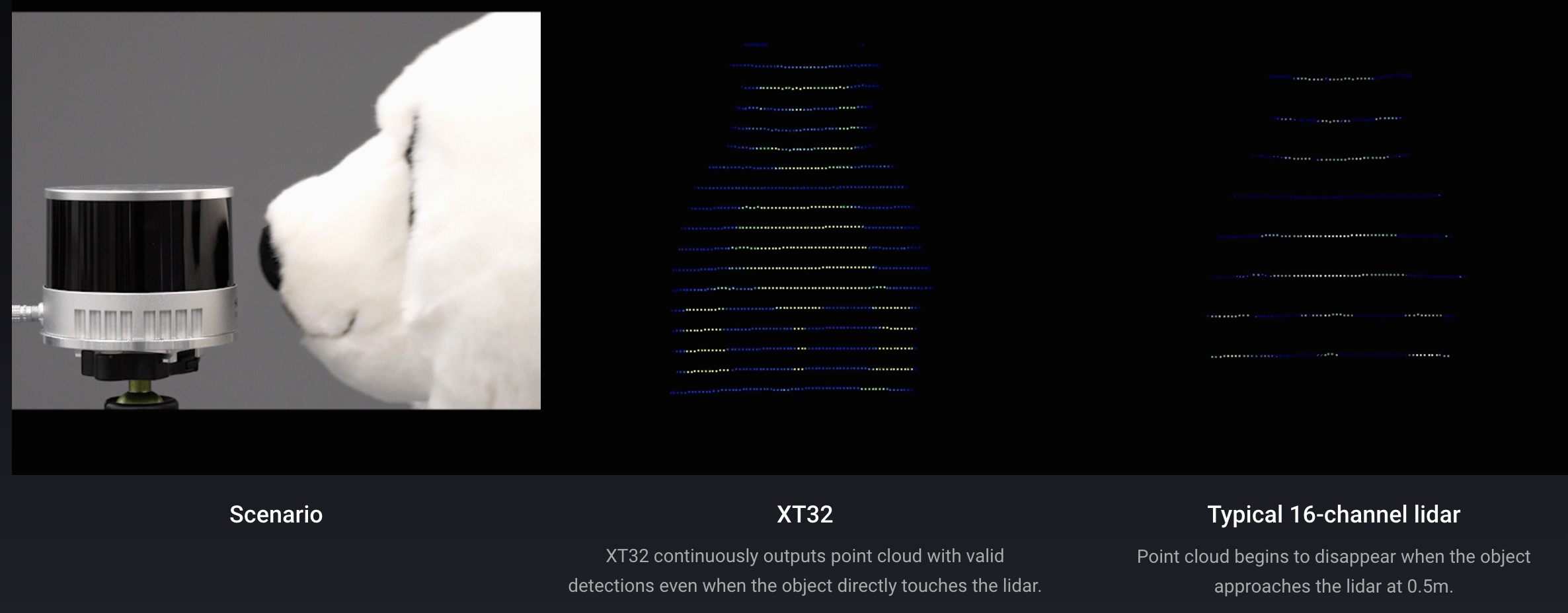
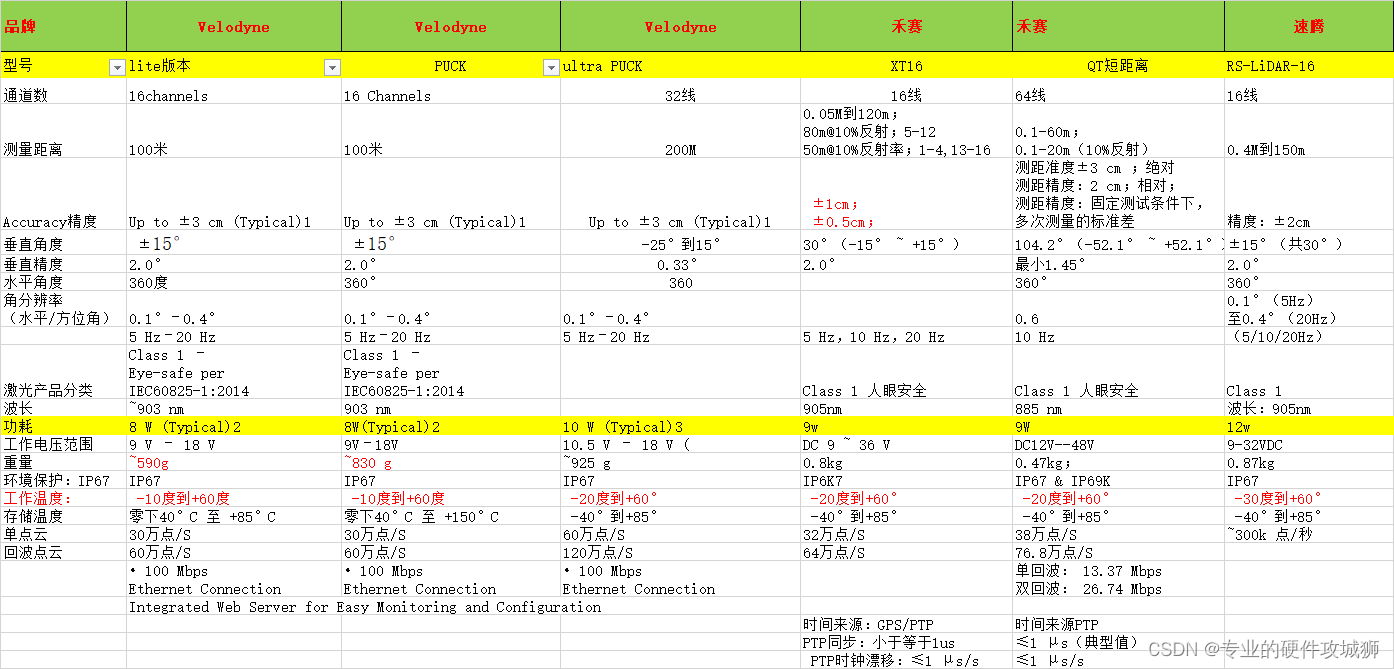
1.1 XT16 & XT32(禾赛)
1.1。1 XT16 性能指标
- 通道数:16
- 视场角 (FOV):垂直视场角为 30° (-15° ~ +15°)
- 分辨率:
- 水平分辨率:0.18° @ 10 Hz
- 垂直分辨率:2°
- 测距范围:0.05 m ~ 120 m
- 测距精度:0.5 cm (1σ)
- 点云率:320,000 pts/s (单次返回)
- 功耗:9 W
- 重量:0.49 kg
- 尺寸:直径 100.0 mm(顶部),103.0 mm(底部),高度 76.0 mm
1.1.2 XT32 性能指标
- 通道数:32
- 视场角 (FOV):垂直视场角为 31° (-16° ~ +15°)
- 分辨率:
- 水平分辨率:0.18° @ 10 Hz
- 垂直分辨率:1°
- 测距范围:0.05 m ~ 120 m
- 测距精度:0.5 cm (1σ)
- 点云率:640,000 pts/s (单次返回)
- 功耗:10 W
- 重量:0.49 kg
- 尺寸:直径 100.0 mm(顶部),103.0 mm(底部),高度 76.0 mm
性能优劣分析
- 通道数:XT32 拥有 32 个通道,相较于 XT16 的 16 个通道,XT32 能捕获更详细的点云数据,适用于需要高密度数据的应用场景。
- 视场角:两者在垂直视场角上差别不大,分别为 31° 和 30°,但 XT32 的分辨率更高。
- 测距范围和精度:两者的测距范围和精度相同,都是 0.05 m 到 120 m,精度为 0.5 cm (1σ)。
- 点云率:XT32 的点云率是 XT16 的两倍,提供了更高的数据捕获能力。
- 功耗和重量:XT32 和 XT16 的功耗和重量相近,XT32 的功耗稍高,但在性能提升的情况下依然保持低功耗优势。
1.2 VLP16 & VLP32(Velodyne)
1.2.1 VLP-16 性能指标
- 通道数:16
- 视场角 (FOV):360° 水平,30° 垂直(±15°)
- 分辨率:
- 水平分辨率:0.1° - 0.4°
- 垂直分辨率:2°
- 测距范围:最大 100 米,推荐 80 米
- 精度:±3 厘米
- 点云率:~300,000 点/秒,回波点云60万点/秒
- 功耗:约 8 瓦
1.2.2 VLP-32 性能指标
- 通道数:32
- 视场角 (FOV):360° 水平,40° 垂直(-25° 至 +15°)
- 分辨率:
- 水平分辨率:0.1° @ 10 Hz,0.4° @ 20 Hz
- 垂直分辨率:0.33°(最细分辨率)
- 测距范围:200 米(10% 反射率)
- 点云率:120万 点/秒(双回波)
- 其他特性:多回波功能,适用于更复杂的环境和需求。
1.2.3 性能优劣分析
- 通道数:VLP-32 拥有 32 个通道,相较于 VLP-16 的 16 个通道,VLP-32 能捕获更详细的点云数据,适用于需要高密度数据的应用场景。
- 视场角:VLP-32 的垂直视场角更大,为 40°,而 VLP-16 为 30°,这使得 VLP-32 能够捕捉更多的环境信息。
- 分辨率和精度:VLP-32 的水平和垂直分辨率更高,更适合精细检测需求。虽然 VLP-16 也能提供良好的精度,但在高精度应用中,VLP-32 更具优势。
- 测距范围和点云率:VLP-32 的测距范围更广,点云率也显著高于 VLP-16,适合需要快速和大范围扫描的场景。
- 功耗和重量:VLP-16 功耗较低,更加节能且轻便,适合对重量和能耗敏感的应用,例如无人机。
以上是前几年用的比较多的激光雷达,最近几年激光雷达线数不断增加,主流已经在128线的级别
1.3 Ouster 128(Ouster)
1.3.1 主要参数:
- 通道数:128
- 垂直分辨率:0.35°
- 水平分辨率:512、1024 或 2048(可选)
- 测距范围:240 米
- 垂直视场角 (FOV):22.5°(±11.25°)
- 点云率:2,621,440 点/秒
- 旋转速率:10 Hz 或 20 Hz
- 精度:1.5 – 5 厘米
- 功耗:14 - 24 瓦
- 重量:1100 克
- 防护等级:IP68, IP69K
1.3.2 优势和特点:
- 高分辨率:128 通道的高垂直分辨率(0.28°),提供更密集、更详细的点云数据,有助于精确的物体分类和地图绘制。
- 长测距:240 米的测距能力,使其适用于需要远距离探测的应用场景,如自动驾驶和安全监控。
- 高点云率:每秒超过 260 万个点,能够生成高密度的 3D 数据,适用于精细检测和复杂环境下的应用。

1.4 OT128
1.4.1 主要参数
- 通道数:128
- 点云率:
- 单回波:3,456,000 点/秒
- 双回波:6,912,000 点/秒
- 测距范围:
- 200 米(10% 反射率)
- 最大 230 米
- 视场角 (FOV):360° 水平,40° 垂直
- 角分辨率:
- 水平:0.1°
- 垂直:0.125°
- 功耗:29 瓦
- 尺寸:最大直径 118.0 mm,高度 132.3 mm
- 工作温度:-40°C 至 85°C
- 防护等级:IP6K9K 和 IP6K7
- 精度:±2 厘米(1 到 200 米)
- 功能安全:符合 ISO 26262
- 网络安全:符合 ISO 21434,具备数据加密功能
1.4.2 性能分析
- 点云密度:OT128 的高点云率(双回波时高达 6,912,000 点/秒)使其在生成高分辨率的3D点云方面表现出色,适合精细检测和高精度测量应用。
- 视场角:360° 水平和 40° 垂直视场角确保广泛的覆盖范围,可以满足自动驾驶和环境感知等多种应用需求。
- 测距能力:最大 230 米的测距范围及高精度(±2 厘米)使其在长距离检测和高精度需求的应用中表现优异。
- 环境适应性:广泛的工作温度范围和高防护等级(IP6K9K 和 IP6K7)使其能够在各种恶劣环境中稳定运行。
- 功能安全和网络安全:符合 ISO 26262 和 ISO 21434 标准,确保系统的功能安全和数据安全。
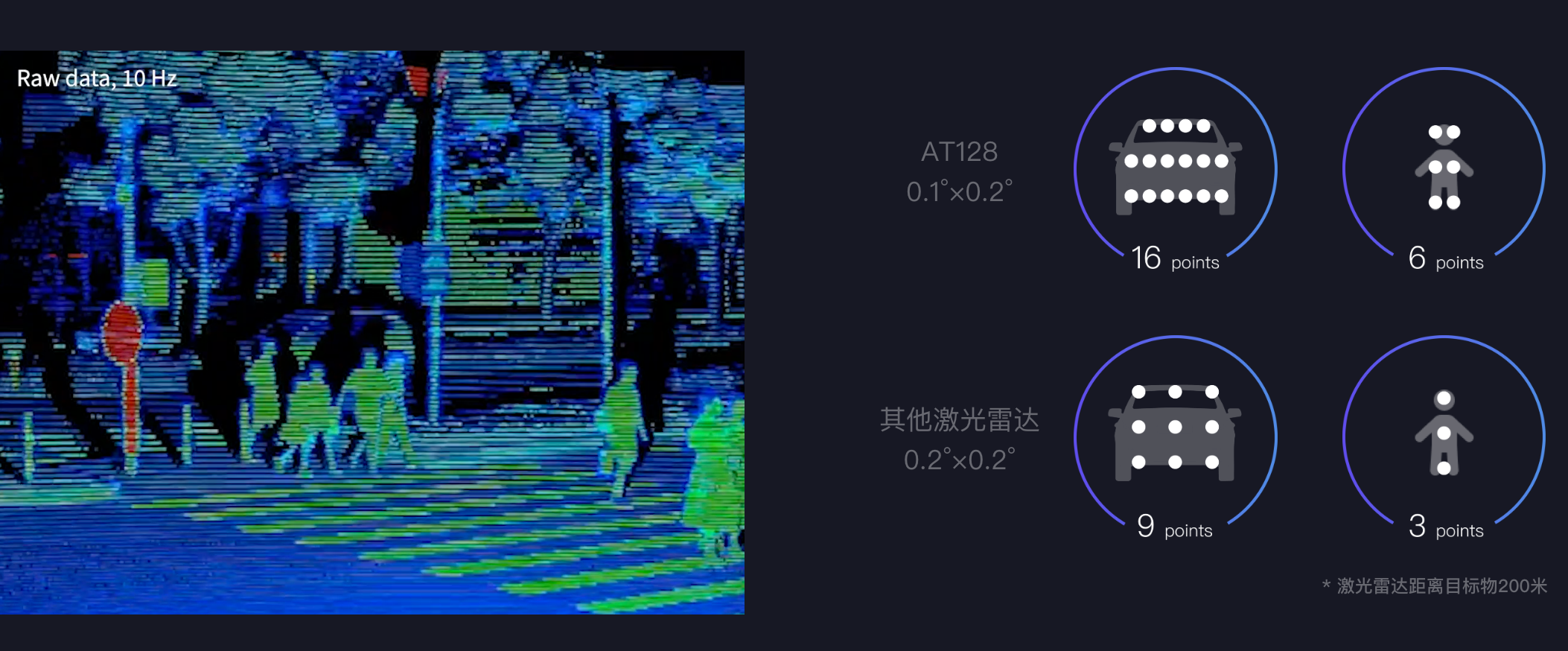
1.5 AT128 && AT512 && ATX(禾赛)
1.5.1 AT128 性能指标
- 通道数:128
- 视场角 (FOV):120° 水平, 25.4° 垂直
- 分辨率:
- 水平:最小 0.05°
- 垂直:最小 0.05°
- 测距范围:210 米 @ 10% 反射率
- 点云率:1,5360,000 点/秒
- 功耗:13.5w
- 尺寸:136 mm x 114 mm x 49 mm
- 重量:0.9 千克
1.5.2 AT512 性能指标
- 通道数:512
- 视场角 (FOV):120° 水平, 25.6° 垂直
- 分辨率:
- 水平和垂直:0.05° x 0.05°
- 测距范围:300 米 @ 10% 反射率, 最远 400 米
- 点云率:12,288,000 点/秒
- 尺寸:160 mm x 110 mm x 45 mm
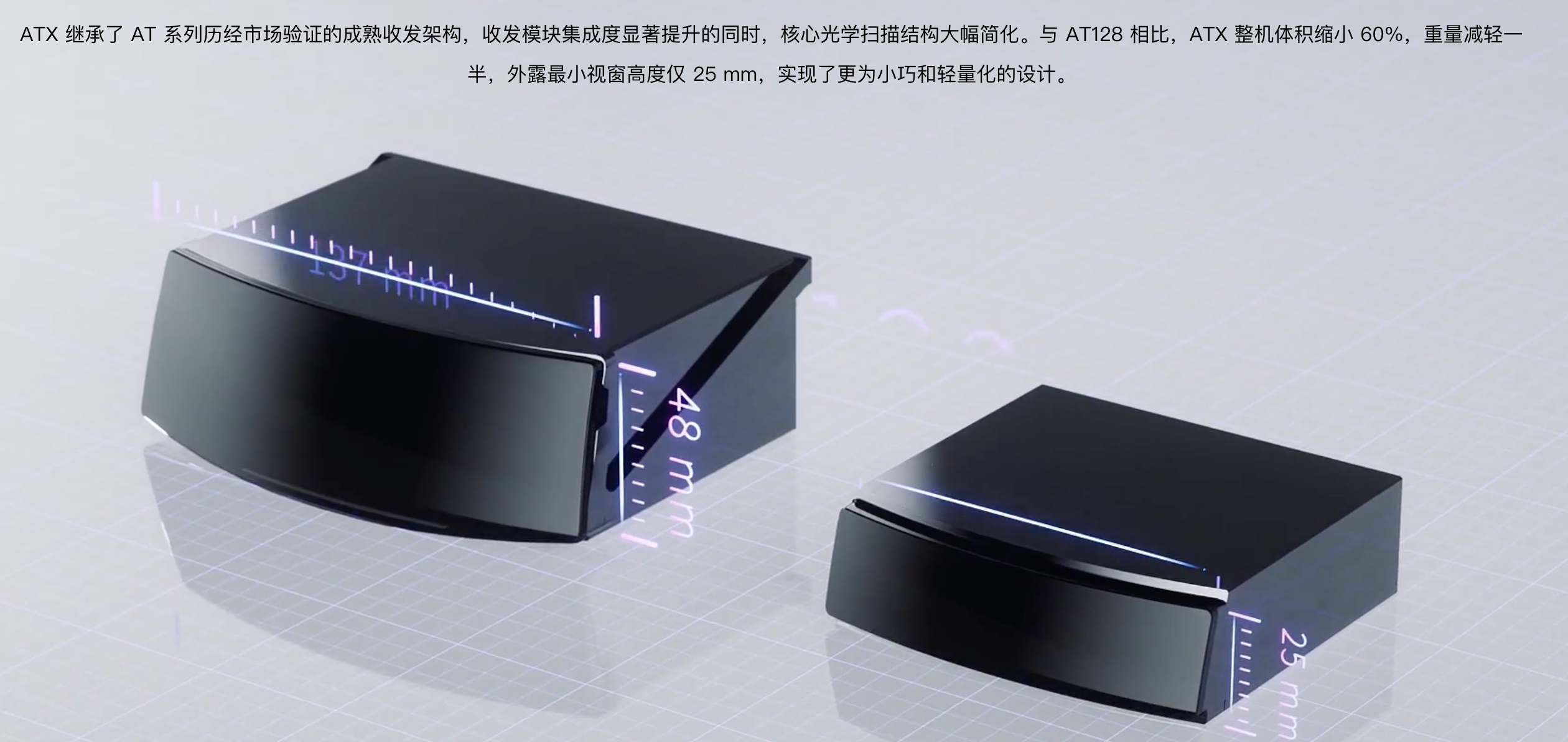
1.5.3 ATX 性能指标
- 通道数:256
- 视场角 (FOV):140° 水平, 20° - 25.6° 垂直
- 分辨率:
- 水平:最小 0.08°
- 垂直:最小 0.1°
- 测距范围:200 米 @ 10% 反射率, 最大 300 米
- 功耗:8 瓦
- 尺寸:100 mm x 25 mm
1.5.4 性能对比
- 通道数和分辨率:AT512 在通道数和分辨率上具有显著优势,提供最高的点云密度和分辨率,适合需要超高精度的应用。AT128 和 ATX 均为 128 通道,但 ATX 提供了更精细的水平和垂直分辨率。
- 测距范围:AT512 和 ATX 的测距范围均高于 AT128,AT512 可达 400 米,ATX 最大测距 230 米,更适合长距离探测。
- 点云率:AT512 的点云率最高,适合高密度数据采集。ATX 的点云率也显著高于 AT128,适用于需要快速数据采集的场景。
- 功耗和尺寸:AT128 在功耗和尺寸上较小,适合能量敏感和空间受限的应用。ATX 尽管功耗较高,但提供更高的性能。
1.6 MID-70 & MID-360(大疆)
1.6.1 Livox MID-70 性能指标:
- 类型:固态激光雷达
- 测距范围:最大 260 米
- 视场角 (FOV):70.4° 圆形视场
- 精度:
- 距离精度:±2 厘米 @ 20 米
- 角度精度:< 0.1°
- 点率:
- 单回波:100,000 点/秒
- 双回波:200,000 点/秒
- 光束发散角:0.28° (垂直) x 0.03° (水平)
- 数据延迟:≤ 2 毫秒
- 工作温度:-20°C 至 65°C
- 防护等级:IP67
- 功耗:8 瓦 (平均)
- 尺寸:97 x 64 x 62.7 毫米
- 重量:580 克

1.6.2 Livox MID-360 性能指标:
- 类型:混合固态激光雷达
- 测距范围:40m @10%反射率
70m @80%反射率 - 视场角 (FOV):360° 水平, 59° 垂直(-7°-52°)
- 精度:
- 距离精度:±2 厘米 @ 10 米
- 角度精度:< 0.15°
- 点率:
- 单回波:200,000 点/秒
- 光束发散角:0.23° (垂直) x 0.13° (水平)
- 尺寸:65 x 65 x 60 毫米
- 重量:265 克

1.7 Avia(揽沃)
- 类型:固态激光雷达
- 激光波长:905 nm
- 激光安全:Class 1 (IEC60825-1:2014)(眼睛安全)
- 测距范围:
- 在 100 klx 光照条件下:190 米 @ 10% 反射率,230 米 @ 20% 反射率,320 米 @ 80% 反射率
- 在 0 klx 光照条件下:190 米 @ 10% 反射率,260 米 @ 20% 反射率,450 米 @ 80% 反射率
- 视场角 (FOV):
- 非重复扫描模式:70.4° 水平 × 77.2° 垂直
- 重复线性扫描模式:70.4° 水平 × 4.5° 垂直
- 测距精度:±2 厘米 @ 20 米
- 角度精度:< 0.05°
- 点率:
- 单回波:240,000 点/秒
- 双回波:480,000 点/秒
- 三回波:720,000 点/秒
- 数据延迟:≤ 2 毫秒
- 内置惯性测量单元 (IMU):型号 BMI088
- 工作温度:-20°C 至 65°C
- 防护等级:IP67
- 功耗:
- 非重复扫描模式:8 瓦(启动功耗 16 瓦)
- 重复扫描模式:9 瓦(启动功耗 16 瓦)
- 尺寸:91 x 61.2 x 64.8 毫米
- 重量:498 克(不含电缆)

1.8 RIEGL HA22
- 测量速率:最高 1,800,000 次测量/秒
- 扫描速度:最高 250 扫描/秒
- 脉冲重复频率 (PRR):可自由选择
- 精度:5 毫米测量级精度
- 视场角 (FOV):360° 无限制数据采集
- 多目标能力:几乎无限数量的目标回波
- 尺寸:227 x 180 x 125 毫米
- 重量:3.5 公斤
- 防护等级:IP64
- 操作温度:-10°C 至 40°C




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











